图1 系统总体结构及数据流向示意图
冯爱国1,2,刘锡祥2,吴 炜1
(1.南通航运职业技术学院航海系,江苏南通226010;2.东南大学微惯性仪表与先进导航技术教育部重点实验室,江苏南京210096)
摘 要:针对无人艇进行海面监测、海难搜救等具体任务需求,以现有小型舰船及动力操控设备为基础,设计并实现了一种水面无人艇导航与控制遥控系统。系统中路径规划/航迹监控模块可根据基站先验地理信息的路径规划及预设极限可航范围监控航行轨迹;危险评价/操控决策模块对雷达跟踪数据及AIS参数的实时分析,获取艇周目标与无人艇的碰撞危险评价,给出无人艇试操纵避让方案;信息交互模块利用4G网络通信技术实现艇上传感器与遥控系统间的数据交互;艇载工控机终端响应模块在收到指令后,仿云台控制利用PELCO-D协议驱动艇上车舵设备。基于某江域的试验结果表明,控制基站与艇数据交换可靠,艇车舵系统能有效响应遥指令。
关键词:雷达跟踪;自动识别系统;无人艇;航姿参考系统;遥控
在过去20年中,无人装备取得了飞速发展,当前无人艇(Unmanned Surface Vessel,USV)主要由美国、英国、法国、加拿大、以色列、日本、中国等10余个国家研制,能够完成情报搜集、反水雷、海事安全和训练测试等方面任务。处于领先地位的美国国家航空航天局喷气推进实验室开发了机器人智能指挥与感知的控制体系架构(CARACaS),旨在使用最少的人工干预完成无人装备的操控和导航。目前,无人艇国内研究与应用也越来越广泛,多个高校及研究机构(如中船重工701所等)开展了无人艇的研究与设计。水面无人艇的操作方式主要包括自主导航、自动和人工遥控等方式[1]。
无人艇制导研究主要包含:1)路径规划方面研究,主要任务为对静态障碍物的避障[2-3];2)智能或在线支持避碰方法研究,主要是基于附近雷达和AIS船舶信息的小范围在线路径动态规划,如杜开君等研究了不同碰撞局面下的规避方案及预留包围体[4];3)数据链建立及运动控制研究,包括模糊控制、神经网络控制等多种航向或航迹控制方法[5]。在此背景下,考虑轻简型无人艇天线高度对雷达应用限制及对艇操纵影响,在基站电子海图上设计航线、允许偏距及多边形可航区域,以实际偏距为输入偏差控制艇运动轨迹,以基站雷达与AIS探测动态障碍物,代艇计算目标对艇碰撞危险并求解符合规则的避让措施,借鉴航海实践设计仿人操作流程,在必须避让偏航时补充艇位越界识别算法,而后基站生成对艇车舵控制指令,设计并实现了一类水面无人艇遥控系统,并进行了试验验证。
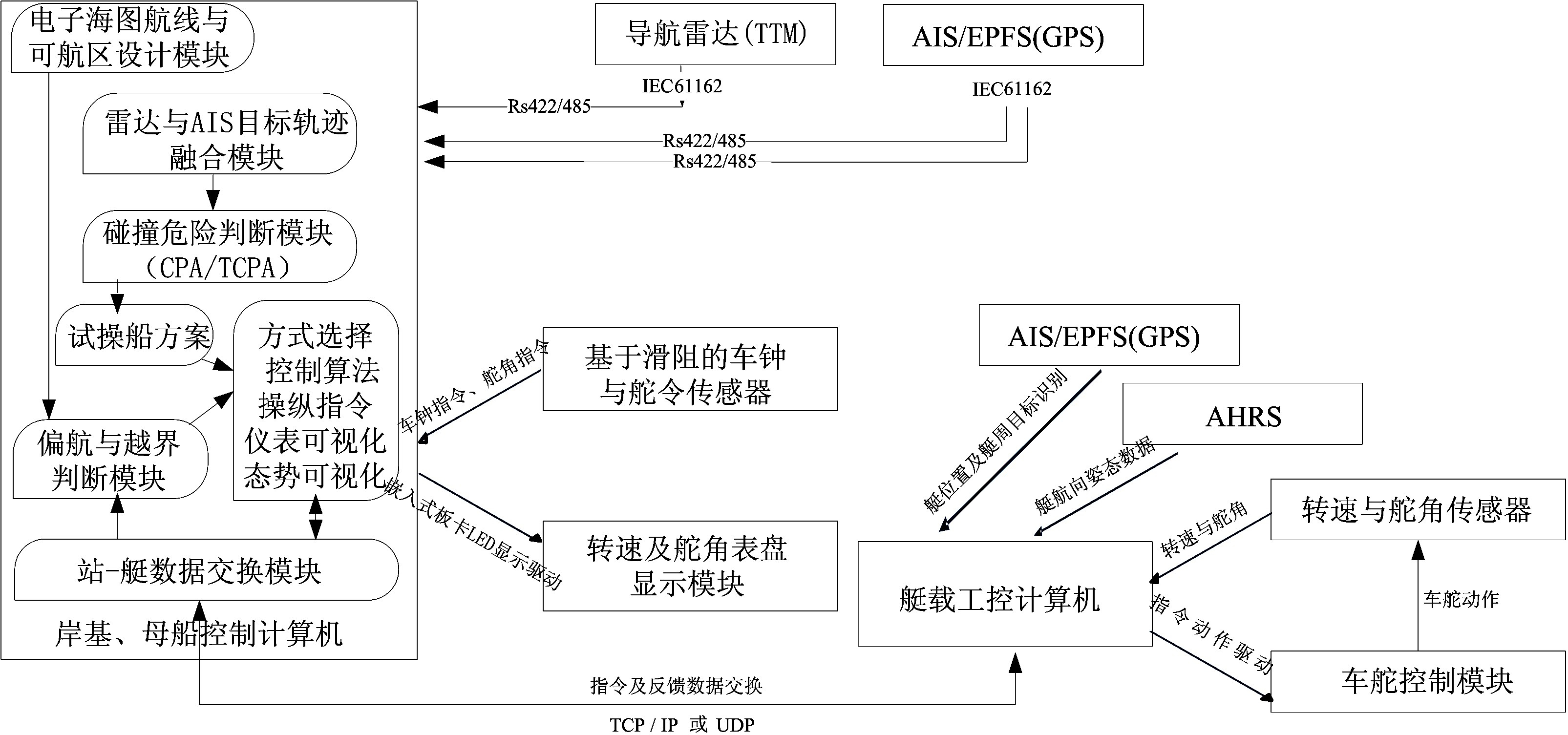
系统由导航雷达提供雷达与AIS参数,系统主体部分包括船用导航雷达与AIS、引导基站计算机、艇操纵指令装置、操纵指令下位机、转速及舵角仪表、远程艇载计算机、艇位、航向航速及艇姿传感器、车舵驱动下位机、车舵响应传感器及下位机。总体结构如图1所示。
图1 系统总体结构及数据流向示意图
各模块的作用是:
1)路径与可航域规划模块 由基站设定艇的计划航线,给定偏航阈值,规划可航水域;
2)导航雷达及自动识别系统(AIS)采集模块通过雷达TRACK CONTROL和AIS接口[6]一站式采集雷达系统数据、雷达目标跟踪数据(TT)、AIS目标数据,获取艇及艇周目标的位置、运动参数;
3)雷达与AIS目标数据融合模块 利用位置与运动参数进行目标数据融合,设定偏离阈,实现雷达目标与AIS目标的时空对准,实现数据归一;
4)碰撞危险判断模块 利用监控基站获取的艇周目标及艇的位置与运动数据,计算艇周目标对艇的碰撞危险参数;
5)试操船模块 若目标与艇存在碰撞危险,利用假定航向、航速,计算出合理的改向改速避让措施;
6)偏航与越界监控模块 根据艇上传回的位置与运动数据,监控实际偏航距离,正常航行中,以偏距对艇航迹控制,必要避让时,依试操船模块决策操艇,避让偏航时监控艇位是否越界,拓展到预测是否会越界及时机;
7)车钟令、舵令、艇推进工位、舵角等嵌入式传感模块 基站仿实船操船装置给出遥控操船指令,同样,转速与舵角模块回传艇的操船响应参数;
8)基站表示模块 实现各参数数值、虚拟仪表与态势可视化的综合显示;
9)网络交换模块 通过TCP/IP或UDP协议实现车舵指令发送及艇数据回传;
10)艇测控模块 收获遥指令实现对艇车舵驱动,采集艇位置、航向、航速、艇姿态、舵角、车钟位等参数。
监控基站遥控无人艇沿规划路径航行,航行中通过雷达、AIS等手段及数据融合技术追踪到无人艇及艇周目标位置与航向航速等运动参数,判断是否是未知的移动障碍物(默认为在航船舶),根据船舶避碰规则,实时计算艇与移动船舶的最近会遇距离DCPA与最小会遇时间TCPA,若有碰撞危险则推算避碰方案,避让中,结合电子海图预设航线、允许偏航距离、极限可航范围等信息,分析有无严重偏航甚至越界的危险,若有调整避碰方案,尽量以减速直至停船避让,让请后,复航至原规划路线,若有碰撞危险,重复试操船及避让环节,直至航行至终点。基本流程如图2所示。
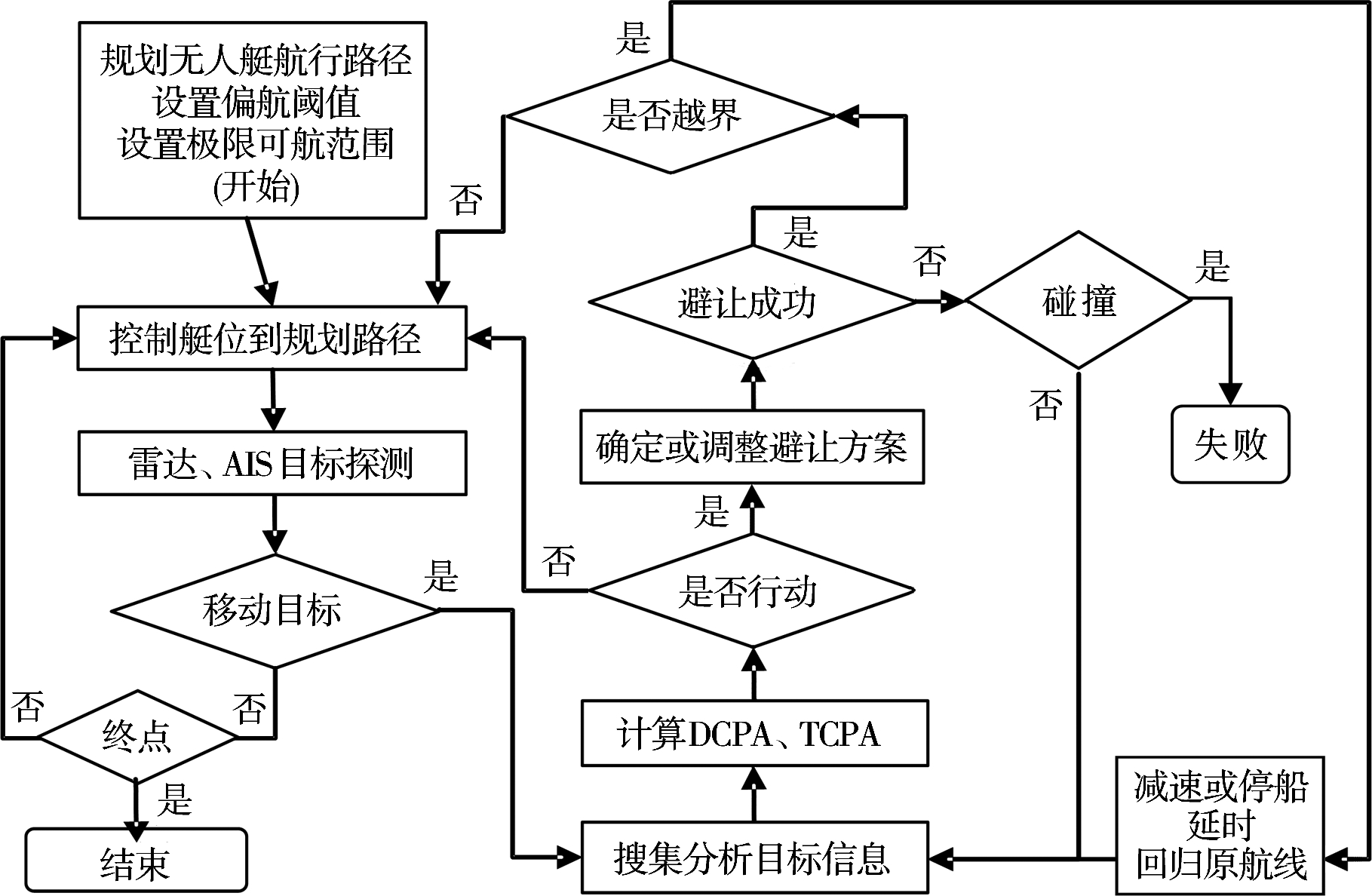
图2 无人艇航行路径规划与避障策略流程图
雷达及AIS均有串行接口,雷达输出系统数据及目标跟踪信息。雷达广播6种IEC61162-1标准语句,其中“$RATTM,xx,x.x,x.x,a,x.x,x.x,a,x.x,x.x,a,c-c,a,a,a∗hh〈CR〉〈LF〉”为目标跟踪语句,“$”表示开始,句块依次表示:目标编号、目标距离、目标方位、真/相对、目标速度、目标航向、真/相对、CPA、TCPA、航速单位、目标名称、目标状态、参考目标、UTC。同理,雷达内也能提供AIS串行输出,解码后可获得船舶的动静态信息[6],主要包含目标船识别码 MMSI码、航行状态、转向速率、对地航速、位置精度、经度、纬度、对地航向、真航向等。
基站采集到艇及艇周移动目标数据实时存储到雷达目标与AIS目标数据库,存储策略为“有则更新、无则添加”[7]。以雷达跟踪语句采集为例,设计含目标编号、距离、方位、航速、航向字段的数据表,运用SqlConnectionstring构建系统与SQLServer的数据库连接,运用SQL语句实现数据库操作,运用SqlData Adapter及Data Table实现数据绑定显示,关键SQL语句如:
(MySQL="if not exists(select∗from RADAR where TGID="+TGIDU+")insert RADAR(TGID,DIST,BRG,T_SPD,T_CRS)values("+TGIDU+","+DISTU+","+BRGU+","+T_SPDU+","+T_CRSU+")"+"else update RADAR set DIST="+DISTU+",BRG="+BRGU+",T_SPD="+T_SPDU+",T_CRS="+T_CRSU+"where TGID="+TGIDU);
句中词尾为U缩写词是采集雷达输出数据的赋值变量。同理,可以随后动态检索艇参数和任意目标的参数。
基于艇周目标与艇位置及运动参数,即已知目标位置Q(λT,φT),艇位置P(λP,φP),算得目标对艇的方位、距离(B0,R0),筛选近艇(距离小于设定值)目标,判断对艇碰撞危险,算法如下:
1)由式(1)、式(2)计算目标(移动障碍物)、无人艇航速东向分量各为dVTX,dVPX;北向分量各为dVTY,dVPY(东为正,北为正):
式中:雷达跟踪输出VT为目标航速,CT为目标航向;远程采集VP为艇航速,CP为艇航向。
2)由式(3)计算移动目标对艇的相对航向C、相对航速V:

若dVX<0,dVY<0,则C=C+360°。
3)由式(4)计算移动目标至最近会遇点的剩余距离SDCPA和所需时间TCPA:
4)由式(5)计算目标与艇的最近会遇距离DCPA:
剩余距离、时间表示紧迫程度,最近会遇距离表示碰撞危险程度,若均小于阈,系统报警、给出避让方案,与碰撞危险评判算法相同,以假定艇向与艇速参与代入式(1)~(5)计算,直至最近会遇距离大于碰撞阈。
偏航及越界算法:艇位置P(λP,φP),航线中的任一转向点为Pk(λk,φk),预设航线中任一分段为式(6):
式中,Ak=yk-1-yk,Bk=xk-yk-1,C=xk-1·yk-yk-1·xk,xk=λk,yk=φk,若λP∈ (λi-1,λi],(0<i≤k),无人艇与计划航线偏航距离由式(7)计算,若d>XTE(XTE为偏航阈),系统给出警告。
设置多边形可航范围S:(P0,P1,…,PN,P0),构建多边形最后一条边为最后一个端点与第一端点的封闭,同理得各边函数,无论是凸壳多边形还是凹壳多边形,只要边不自交,以艇位置为起点构建向南(向下)的射线(x=λP,y<φP),与多边形各边交点数为奇数时,则艇位置在极限可航范围内,否则,出界,给出危险报警[8]。算法为:遍历多边形各边,若λP∉ (λk-1,λk],则构建射线与该段无交点;若λP∈ (λk-1,λk],λP代入该边函数lk,解得λP映射解φkP,若φkP≤φP,判断有交点,反之,与该边无交点;累计交点数,除2取余计算后,余数为1判为奇数,得艇位置在界内,反之越界。艇碰撞危险与艇位越界监控原理如图3所示。
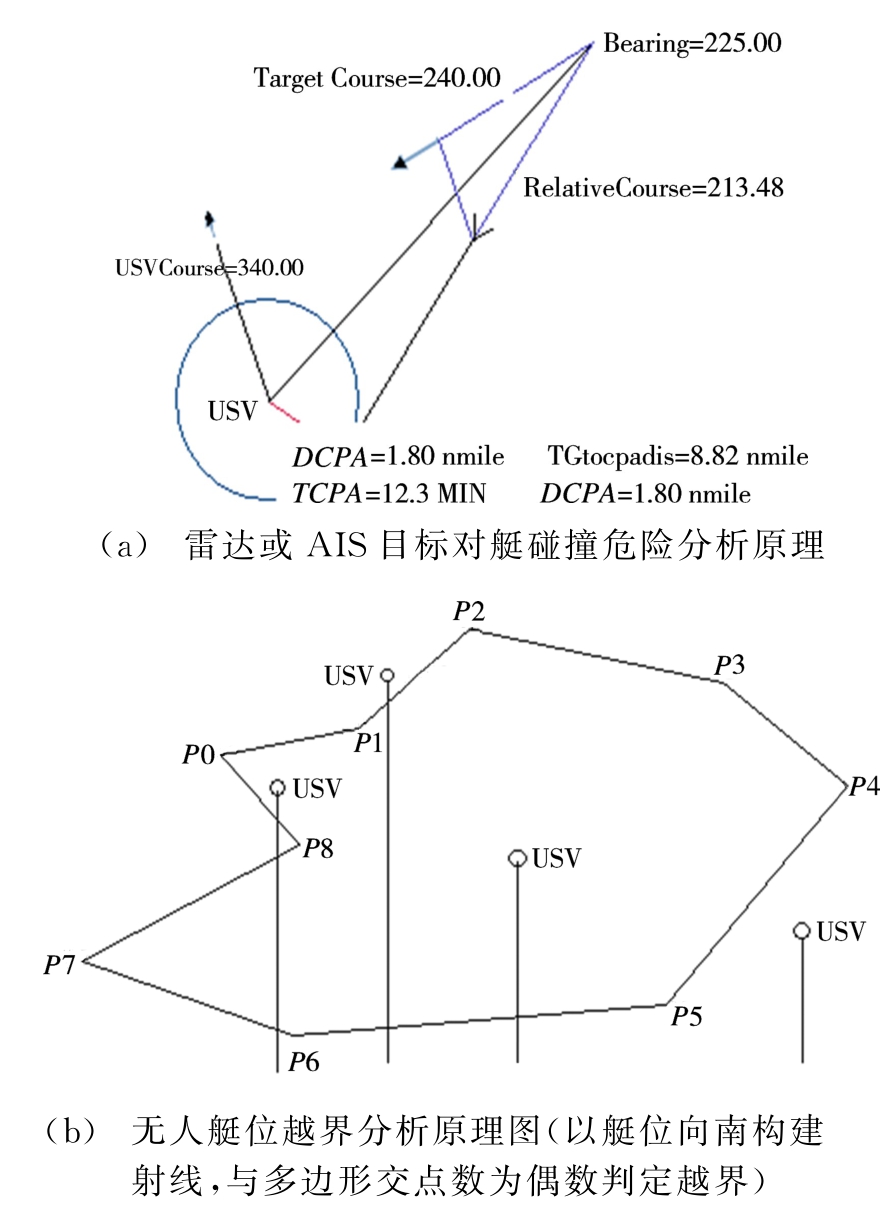
图3 艇碰撞危险与艇位越界监控原理图
以舵令及舵角反馈为例,使用滑阻式或磁敏式角位移传感器和STC12C5 A60S单片机设计舵令或舵角采集电路,如图4所示。图中:STC12C5 A60S的8路10位A/D转换可实现多路角度(电压DC:0~ +5 V)信号数字化,本系统采用P1.6,P1.7通道保证两路互为备用采集舵令或舵角信号,140°~220°测角映射+1.945~+3.055 VDC。巡检传感器10位二进制工位数,得对应测角(-40°~+40°)[9]。同理,实现车钟令及艇上油(电)门摇柄位置反馈采集。
网络数据交换:基站 固定IP;艇装备 4G路由器,Internet UDP协议实现群聊式双向数据交换[10]。步骤如下:
1)定义UDP用户UdpClient;
2)定义并指定群IP地址IPAddress变量group Address;
3)定义本地端口号localPort及远程端口号remotePort;
4)定义远程终结点IPEnd Point变量remoteEP;
5)使用Join MulticastGroup方法将Udp Client加入到指定IPAddress的多路广播群;
6)启动 UdpClient的端口侦听入群用户,发送信息加IP地址作为对方远程地址给入群用户;
7)启动定时发送,发送标准化传感器采集报文或遥指令报文在群内广播,群用户根据报文所含地址确定信息是否为使能数据。
信息格式为:
控制基站:“$Remote,〈1〉,〈2〉,〈3〉,〈4〉∗hh”,〈1〉艇号地址码,〈2〉推进器指令,〈3〉舵令,〈4〉操控模式(A:自动,M:手动,S:自适应),hh:异或和校验值;
艇回传信息:“$Bback,〈1〉,〈2〉,〈3〉,〈4〉,〈5〉,〈6〉,〈7〉,〈8〉,〈9〉,〈10〉,〈11〉,〈12〉,〈13〉,〈14〉,〈15〉,〈16〉∗hh”,〈1〉艇号,〈2〉UTC,〈3〉推进器控制位,〈4〉舵角,〈5〉航行模式,〈6〉艇经度,〈7〉艇纬度,〈8〉定位状态,〈9〉对地航速,〈10〉对地航向,〈11〉艇纬度,〈12〉定位状态,〈13〉对地航速,〈14〉艇航向,〈15〉纵摇角,〈16〉横摇角,hh:异或和校验值。
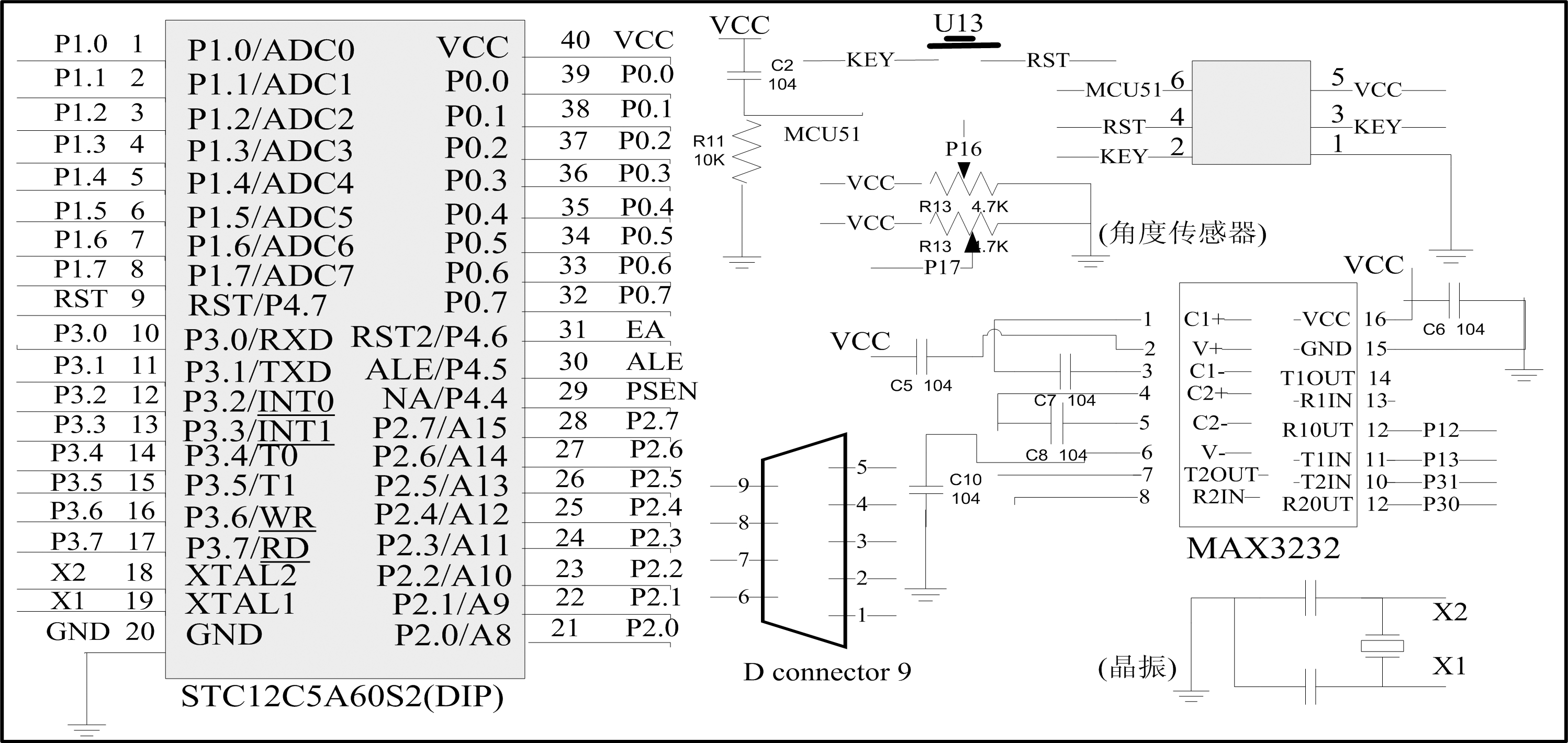
图4 车舵指令及反馈数据测量装置图
艇站收到基站网络报文后,要车指令及舵令与推进器推杆反馈及舵角反馈值比较,当存在偏差时,生成驱动艇车舵装置的执行指令通过一路串口向下位机发送。艇舵角和推进器由δ(舵角)、θ(推杆摇角)约束,驱动舵及油门开度方法借鉴监控云台控制技术,机电控制板卡以云台内控制板进行功率改造,仿云台PELCO-D协议实现收令后响应使能,实现远程数字化随动[11]。
为快速响应及防超调,电机转速给值通过数字PID控制模型先行计算,简单描述:偏差越大时电机给定转速快,反之则慢。由于一般舵装置及用车摇柄自身阻尼特性较好,控制系统中惯性环节考虑省略。增量控制法的系统输出为
以舵角为例,设t时刻第k次采样给定舵令值δc,舵角反馈δ,偏差输入e(k)=(δc-δ)/30,PID控制输出为u(k)(u(k)∈[0,1]),转舵控制指令十进制数据为u(k)·64,十进制转十六进制即为转舵电机速度指令。
基站雷达采集艇周目标及艇位置与运动数据如图5所示,无人艇车舵及位姿与运动数据同时由4G网络采集。PELCO-D协议舵角及推进摇柄电机控制速度指令为00~3F对应0~64级,蜗杆传动如图6所示,舵角偏差大于5°及摇柄偏差大于3°时,均输出最大值3F;二者小于5°及3°时,偏差输入PID模块输出00~3F驱动速度。数据交换如图7所示,雷达、海图态势的监控效果如图8所示。

图5 雷达接口
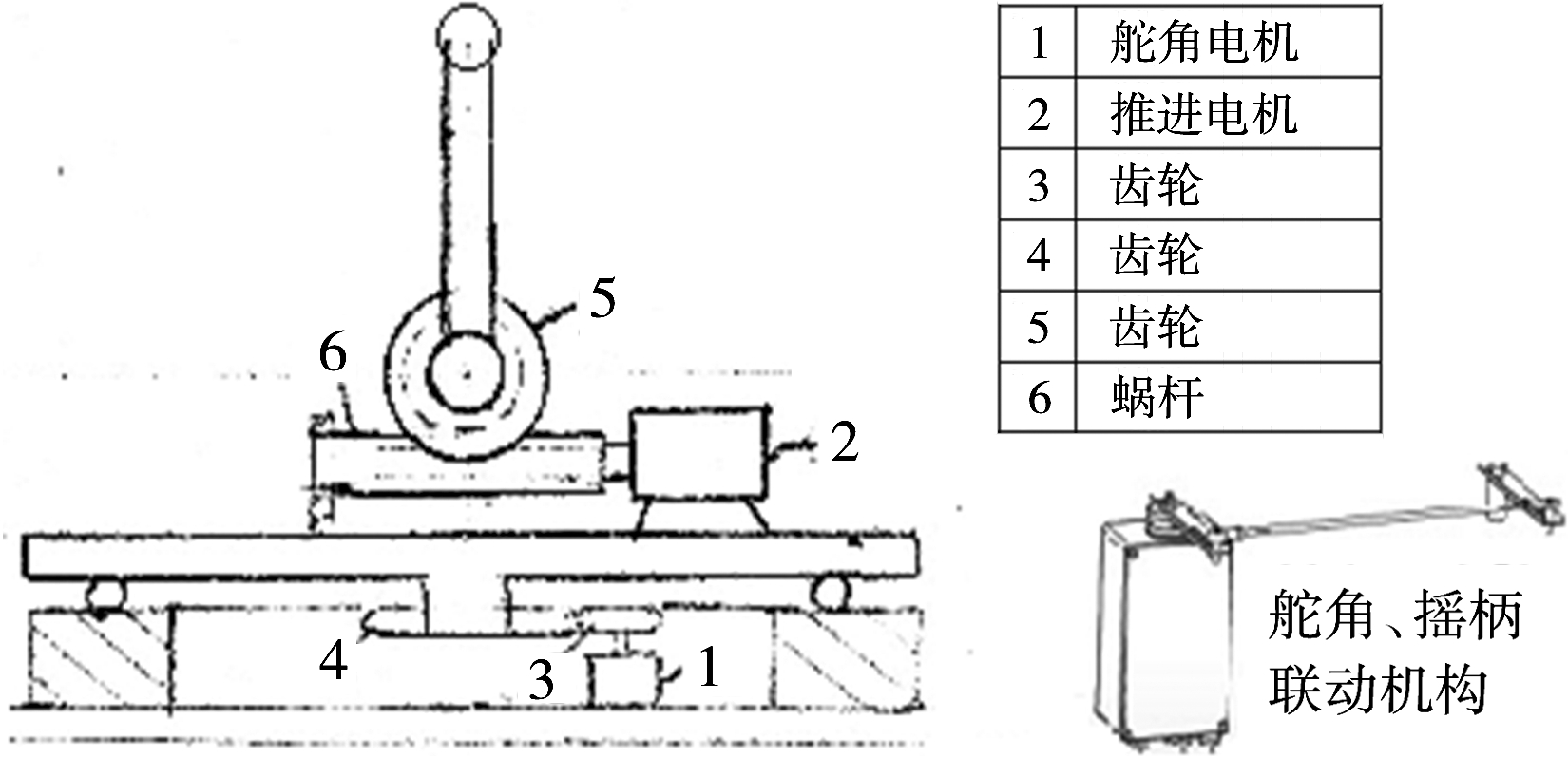
图6 车舵装置

图7 网络数据交换
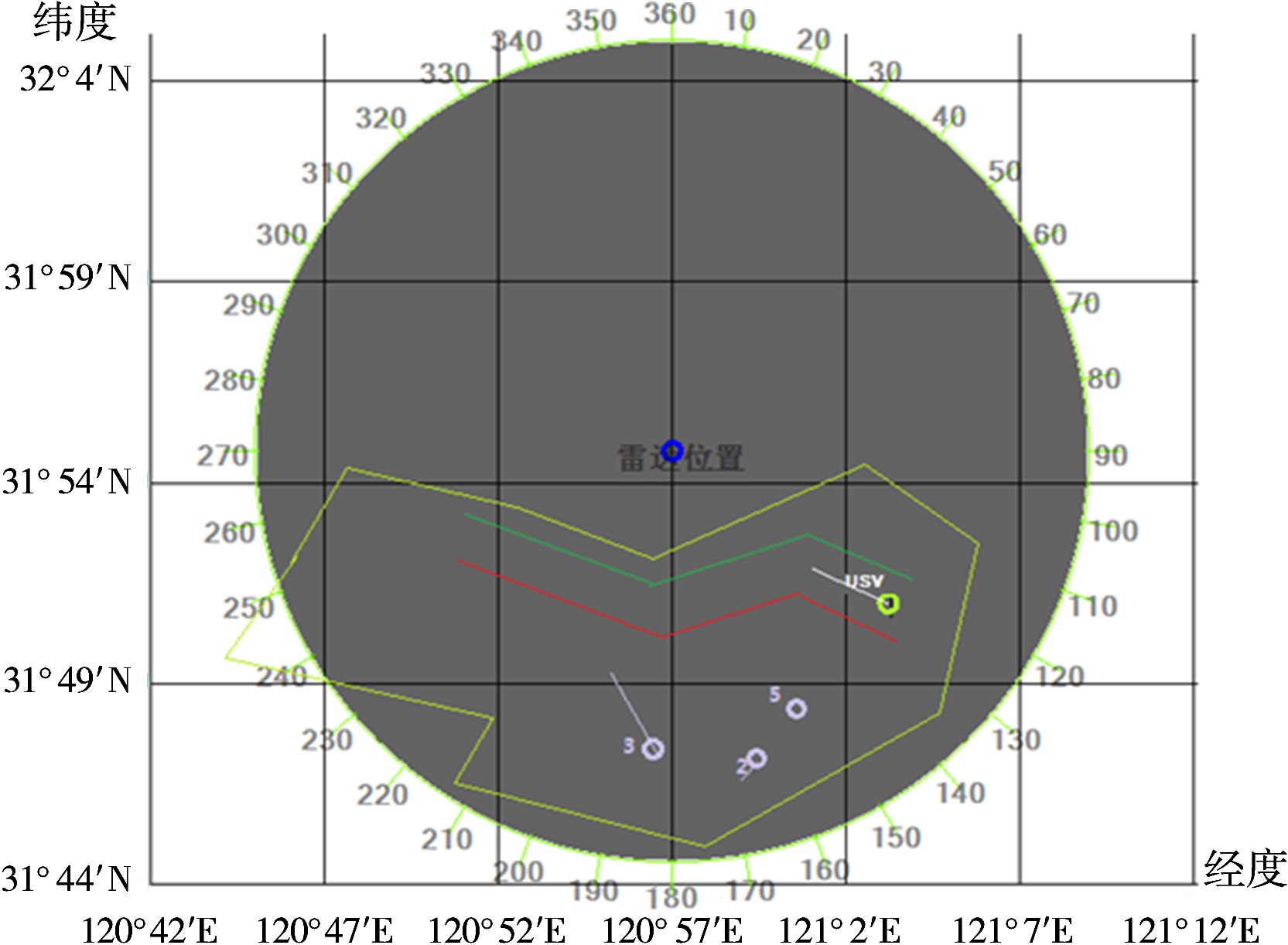
图8 雷达、海图监控效果
本文提出并实现了一类水面无人艇导航与控制遥操作系统。该系统针对无人艇的实际航行与避障需求,将系统功能具体划分4个模型,并给出了实现过程。系统以基站电子海图与雷达、AIS规划艇运动路径及实现在线避碰支持,可以避免贵重航海设备的在艇风险,也可以轻简艇载计算机程序,避免过多的线程带来软件陷阱,运用多边形可航区域识别能有效防止艇位越界。系统后续应加强基站路径规划及预设可航边界在离艇前传入艇载计算机,以便一旦离线实现艇自主导航,同时应考虑利用艇载AIS设计有限的离线自动避让算法,考虑艇操纵特性,还需加强越界预测,此外,应加强通信链路的可靠性设计,一旦离线失控,尚须启动辅助信号显示及保持安全艇位的设计方法。
参考文献:
[1]沈智鹏,刘继中,汪宇,等.一种无人水面艇控制仿真系统研究[J].系统仿真学报,2015,27(9):2038-2043.
[2]卢艳爽.水面无人艇路径规划算法研究[D].哈尔滨:哈尔滨工程大学,2010.
[3]陈华,张新宇,姜长锋,等.水面无人艇路径规划研究综述[J].世界海运,2015,38(11):30-33.
[4]杜开君,茅云生,向祖权,等.基于海事规则的水面无人艇动态障碍规避方法[J].船海工程,2015,44(3):119-124.
[5]BAO Xinping,NONAMI K,YU Zhenyu.Combined Yaw and Roll Control of an Autonomous Boat[C]∥2009 IEEE International Conference on Robotics and Automation,Kobe,Japan:IEEE,2009:188-193.
[6]段晓超,段玲琳,李化雷.星型拓扑RS422信号传输特性研究[J].雷达科学与技术,2016,14(1):91-94.DUAN Xiaochao,DUAN Linglin,LI Hualei.Research on Star Topology RS422 Signal Transmission[J].Radar Science and Technology,2016,14(1):91-94.(in Chinese)
[7]王春艳,李帅.SQLite在飞艇监控中的应用与优化[J].雷达科学与技术,2014,12(6):609-612.WANG Chunyan,LI Shuai.Optimization and Application of SQLite in Monitoring and Control System of Airship[J].Radar Science and Technology,2014,12(6):609-612.(in Chinese)[8]冯爱国,吴炜,季本山.基于雷达及AIS的水上设施自动警戒与保护[J].中国港湾建设,2015,35(6):65-69.
[9]张爱华,姚海燕.角度传感器在全位置自动焊接系统中的应用[J].计算机测量与控制,2009,17(12):2426-2829.
[10]罗亚男,付永庆.基于分层路网的路径规划算法[J].计算机应用,2013,33(6):1763-1766.
[11]王丽辉,程永强.基于LPC2132的云台摄像头解码器设计[EB/OL].[2016-05-21].http:∥www.pa-
The Unmanned Vehicle Remote Control System Based on Base-Station Radar and AIS
FENG Aiguo1,2,LIU Xixiang2,WU Wei1
(1.Department of Navigation,Nantong Vocational&Technical Shipping College,Nantong226010,China;2.Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology of Ministry of Education,Southeast University,Nanjing210096,China)
Abstract:For the unmanned boat to achieve the sea environmental monitoring,searching and rescuing a remote operating system is designed for the unmanned boat based on the hull and power control equipment on an operational boat.Based on a priori,the path planning of geographical information and the preset navigable limit scope,the route planning and monitoring module of system control USV track.The real-time avoidance collision decisions from the risk assessment/manipulation decision module is made by the information around the unmanned boat from the AIS(automatic identification system)and the radar at shore or mother ship.Information interaction module uses wireless network to realize the data interaction between the sensor on the boat and the remote control system,and sent remote control commands to the craft.The craft uses PELCOD agreement instruction to drive the maneuvering equipment.The test in Yangzi River indicate that the data exchange between the controlling station and the unmanned boat is reliable and the system of main engine and the rudder can responds the boat remote controlling commands effectively.
Key words:radar tracking;automatic identification system(AIS);unmanned surface vessel(USV);attitude heading reference system(AHRS);Remote control
中图分类号:TN953;TP242
文献标志码:A
文章编号:1672-2337(2017)01-0055-06
DOI:10.3969/j.issn.1672-2337.2017.01.010
收稿日期:2016-06-02;
修回日期:2016-07-18
基金项目:江苏省高校优秀科技创新团队资助项目;南通市科技计划研究项目(No.BK2014031);江苏交通科研项目(No.2011C04-11);江苏省“333工程”(第三层次)科研项目资助基金(No.BRA2014312)
作者简介:

冯爱国男,1970年生,江苏如东人,南通航运职业技术学院航海系副教授,远洋船长,江苏省高校优秀科技创新团队带头人,江苏省“333高层次人才培养工程”第三层次培养对象,主要研究方向为航海及导航技术、计算机在航海中的应用。E-mail:fengag@ntsc.edu.cn