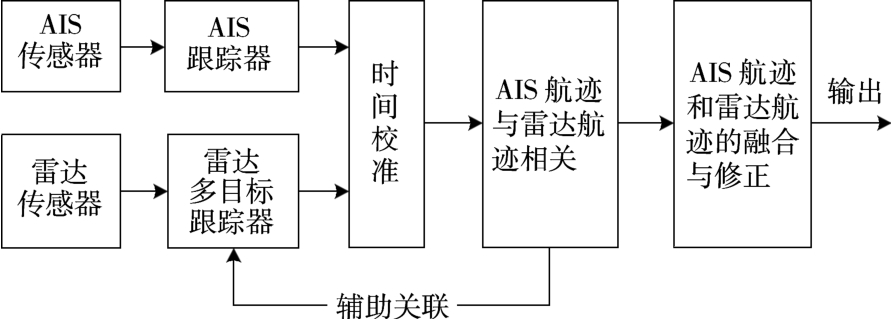
图1 雷达与AIS信息融合模型
贺丰收,缪礼锋,陶飞翔,张 存
(中航工业雷华电子技术研究所,江苏无锡214063)
摘 要:针对海面密集目标跟踪时数据关联难度大且跟踪精度不高的问题,提出了一种基于船载自动识别系统(AIS)信息的雷达航迹融合方法。首先,根据AIS测量值和雷达的测量噪声等级确定融合系数,保证融合数据的合理性;然后,使用融合后的航迹对雷达测量值作双波门的数据关联处理,优化数据关联方法,提高源于目标测量值的置信度,降低虚警和杂波的影响,进一步提高航迹的稳健性和跟踪精度;最后通过仿真和实测数据证明了所提方法的有效性和优越性。
关键词:海面密集目标跟踪;航迹融合;AIS信息;数据关联
在含杂波或多目标背景条件下,数据关联是对目标进行稳定及正确跟踪的关键技术[1-3]。雷达在对海多目标跟踪中,由于海杂波强烈以及目标密集程度高,对目标的跟踪性能产生了较大的影响。传统的目标跟踪方法是依据目标的运动学特征形成航迹的,通过运动模型对目标下一时刻的位置进行递推预判,并与当前雷达返回的测量值进行关联。当目标较为稀疏时,往往可以获得较为不错的跟踪效果,但当目标密集且杂波严重时,由于受雷达测角精度的限制,使得不同目标的测量值容易落入同一个目标的波门内,跟踪效果往往不佳。鉴于此,学者们提出了许多方法来解决这个问题,主要的思路都集中于借助目标的非运动特征辅助多目标跟踪,比较典型的有借助于目标的多普勒信息、信号幅度、一维距离像等[4-6]。由于海面目标是慢动目标,多普勒信息很难获取;目标信号幅度的变动非常剧烈,同等大小的目标难以区分;而一维距离像也随船只姿态的变化而大幅变化,工程实践能力不强。
自动识别系统(Automatic Identification System,AIS)作为一种新型的助航系统,它能提供船舶的 MMSI、长度、GPS位置、航向、航速等信息[7]。现代海面监视飞机一般均已装备AIS接收器,可接收舰船的信息。已有学者将其用于目标的辅助跟踪,但主要将AIS的航迹与雷达航迹进行融合[8-11],并没有将AIS信息用于雷达多目标跟踪数据关联内部逻辑上。故本文提出了一种基于AIS信息的对海雷达多目标融合跟踪方法,在AIS航迹与雷达航迹融合的基础上,用融合后的信息辅助计算关联概率,增大相邻目标的关联准确率,从而提高航迹的稳健性及目标航速航向精度。
一般情况下,基于AIS的多目标航迹融合框架有AIS跟踪器和雷达多目标跟踪器,两者相互独立工作,分别形成各自的航迹,然后通过时间校准将两种航迹外推到同一个时间点上,以便为后续航迹相关作准备。航迹间关联一般采用M-N准则,一旦雷达航迹与AIS航迹相关上,那么两者就可融合,从而提高航迹精度。其主要过程如图1所示。
图1 雷达与AIS信息融合模型
由于AIS跟踪器可以获得目标的MMSI,故不需要数据关联的过程,适当地剔除部分野值后,就可以采用EKF方法,直接更新AIS航迹,同时根据目标的GPS位置[LatTLonTHT]和载机的GPS位置[LatPLonPHP],其中,LonT和LonP表示目标和载机的经度,LatT和LatP表示目标和载机的纬度,HP和HT表示载机和目标的高度,将其折算到雷达视角的极坐标参数,转换流程如下:
1)分别将目标和载机点的GPS位置转换到地心固定坐标系的位置PT和PP;
2)求两个位置之间的差值P=PT-PP;
3)求载机所处位置NED坐标系与地心协定坐标系之间旋转矩阵DCM;
4)根据位置差值P和旋转矩阵DCM,求出目标在载机所在位置NED坐标系下的三向位置[X Y Z]T=DCM·P;
5)由三向位置X,Y,Z,计算径向距离RAIS=![]() 地理系方位角AzAIS=tan-1(Y/Z)。
地理系方位角AzAIS=tan-1(Y/Z)。
由于数据源的不同,两种跟踪器获得距离和方位角的精度不一,因此如何选择合适的系数对其进行融合,保证融合数据合理性是本文研究的重点。
雷达多目标跟踪器对航迹更新之前首先要进行数据关联,现阶段工程实践采用的比较先进的算法是JPDA方法,通过将有共享测量值的测量和航迹放入同一个确认矩阵中,通过以下两个假设条件进行约束:
1)每个测量值均有唯一的源;
2)对于给定的目标,最多有一个量测以其为源。
拆分确认矩阵,形成多种可能的可行事件,最终根据多种可行事件计算测量值源于目标的联合概率。由于只有一种可行事件是正确的,因此这种方法本质上将不属于目标的测量值,也以一定的概率关联到航迹上,一旦有多个测量落入到航迹的波门内,那么跟踪精度肯定会受影响,甚至会失跟。而这类问题主要是由雷达的测量精度引起的,若在关联过程将精度更高的AIS信息用于辅助关联,将极大提高雷达的总体跟踪性能。
本文将在下节重点讨论两个问题:一是AIS航迹与雷达航迹的融合;二是AIS信息如何用于辅助多目标数据关联与修正更新。至于时间校准和航迹间的关联已有大量学者进行深入研究,本文不再赘述。
由于AIS的位置信息是由GPS获取的经纬度信息,其噪声分布可以分解到北向位置和东向位置上,分别为北向噪声标准差σN和东向噪声标准差σE。而雷达的位置信息是在极坐标系下获得的,其测量噪声分为径向距离噪声σR和方位噪声σAz。要对这两项不同噪声系数的数据进行融合,其核心要将噪声转换到同一坐标系下,再进行归一化处理。
如图2所示,将GPS的测量精度转换到雷达极坐标系中,已知目标在雷达中所处的地理系方位角为θAz,径向距离为R。
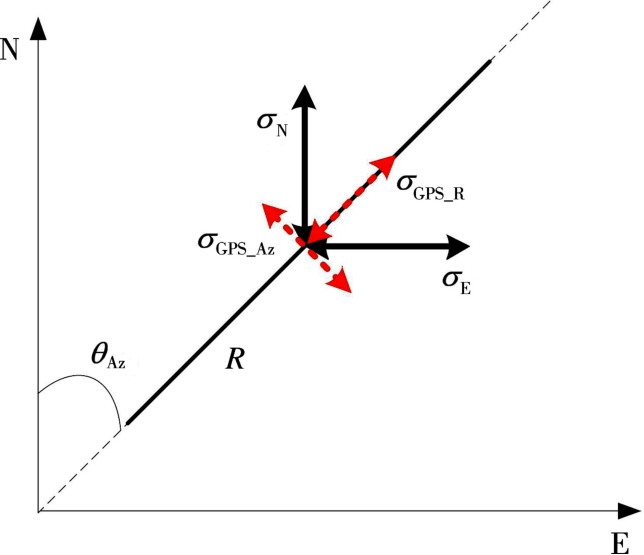
图2 噪声分布示意图
根据坐标旋转准则,可得AIS数据在雷达测量极坐标系中的噪声标准差,其中径向的标准差![]() 为
为
方位向的标准差σGPS_Az为
通过上述方法可以得到AIS测量值在雷达测量系中的噪声水平ωAIS_R,ωAIS_Az,并对其与雷达的测量噪声进行归一化处理,得到在雷达系的归一化加权系数ωRadar_R,ωRadar_Az:
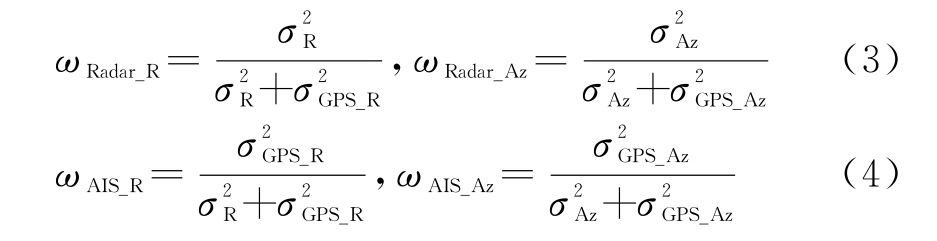
式中,ωRadar_R+ωAIS_R=1,ωRadar_Az+ωAIS_Az=1。最终的融合输出为

通过航迹关联算法将AIS航迹与雷达航迹关联后,可以使用AIS航迹的波门对已关联上的雷达航迹进行二次关联概率计算,如图3所示,虚线表示雷达航迹,其预测中心为PR,关联波门为GR;实线表示AIS航迹,其预测中心为PA,关联波门为GA,Z1和Z2为雷达的测量值。
定义统计距离d=vTS-1v,其中,v为测量值与航迹预测中心的残差矢量;S=HP HT+R为信息协方差;H为测量矩阵,P为预测协方差阵,R为测量噪声矩阵。由于AIS航迹和雷达航迹分别采用独立滤波器进行估计,故以下标形式区分。
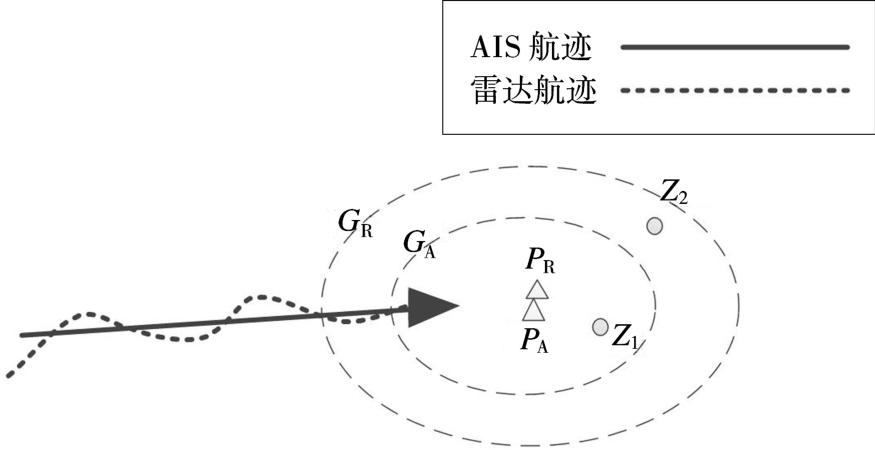
图3 辅助关联示意图
首先在雷达目标跟踪时,通过计算量测与航迹统计距离dR,并将其与关联波门GR比较,若量测值落入波门内,即dR≤GR,则计算量测值与航迹的似然概率pR为
否则,似然概率为0。然后将所有与雷达航迹关联上的测量值,即似然概率大于0的测量值,与航迹相关联上的AIS航迹作二次匹配,即计算雷达测量值在AIS航迹中的统计距离dA,并与AIS波门GA进行比较,若dA≤GA,则表明测量值属于雷达航迹的可能性更高,应该提高此测量值的置信度,而对于没有落入AIS航迹波门内的测量值则降低其置信度,尽可能减少由于杂波、虚警以及源于其他目标的测量值对航迹的影响。因此,似然概率的修正公式如下:
式中,k1≥1,k2<1。然后将修正的关联概率用于形成JPDA确认矩阵,若存在i条航迹和j个测量值,那么第j个测量与第i个航迹修正后的似然概率表示为![]() 形成(i+1,j)维确认矩阵。按照JPDA方法的一般流程生成多个联合事件θi,并计算联合事件概率P{θi|Z}。最终利用此概率计算出归一化后的量测和航迹的互联概率,并对航迹进行滤波更新。
形成(i+1,j)维确认矩阵。按照JPDA方法的一般流程生成多个联合事件θi,并计算联合事件概率P{θi|Z}。最终利用此概率计算出归一化后的量测和航迹的互联概率,并对航迹进行滤波更新。
此时,由于融合后误差明显减小,因此对于雷达目标跟踪滤波器而言,必须对其滤波协方差进行压缩,与当前的精度等级相匹配,以便获得更好的后继关联效果。
修改的权值取距离和方位归一化之后的中值,即
因此,融合之后的协方差修正值为
通过上述融合与修正方法,可有效提高航迹的跟踪质量。
为验证本文所提方法的有效性和优越性,本文从仿真数据和实测数据两个方面进行详细分析和说明。
当某型雷达对海面目标跟踪时,雷达采用TWS扫描,扫描范围为360°,扫描速率为30°/s。目标扫描周期为12 s一次。考虑到检测概率,实际目标数据率要更低。假设目标数据率为15 s,测距精度为30 m,方位角测角精度为0.5°,目标船航速为10 m/s,k1=1.2,k2=0.8,GR=8,GR=6。
为了验证AIS辅助数据关联的作用,这里仿真实现了3个平行运动的船只。其真实运动轨迹如图4所示,载机固定在坐标原点。
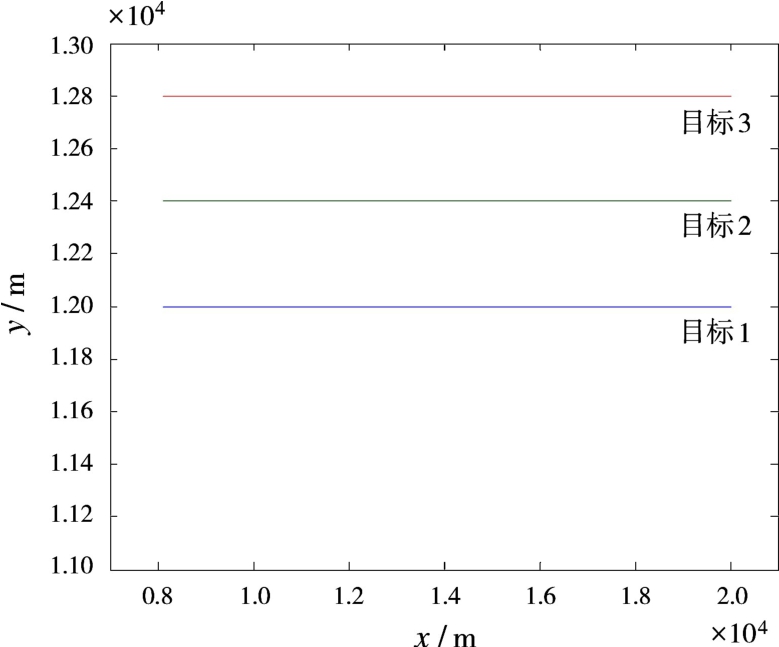
图4 目标运动轨迹实际值
从图4可以看出,3个目标平行运动,且间距较小,因而对数据关联的要求很高。仿真的数据关联方法采用JPDA关联方法。比较JPDA和JPDA+AIS两种方法的关联性能和跟踪精度,分别如图5所示。
从仿真结果可以看出,单纯采用JPDA关联方法,在目标间距较小时,数据关联错误率较高,导致航迹出现串扰,航迹的位置精度也较低。但采用本文提出的方法关联后,通过利用AIS航迹的角度信息修正航迹的角度状态,航迹不易被错误测量拉偏,即使被小幅拉偏后也能及时被修正回来。因此本文提出的方法在目标间距较小时能够实现目标的正确关联和稳定跟踪。
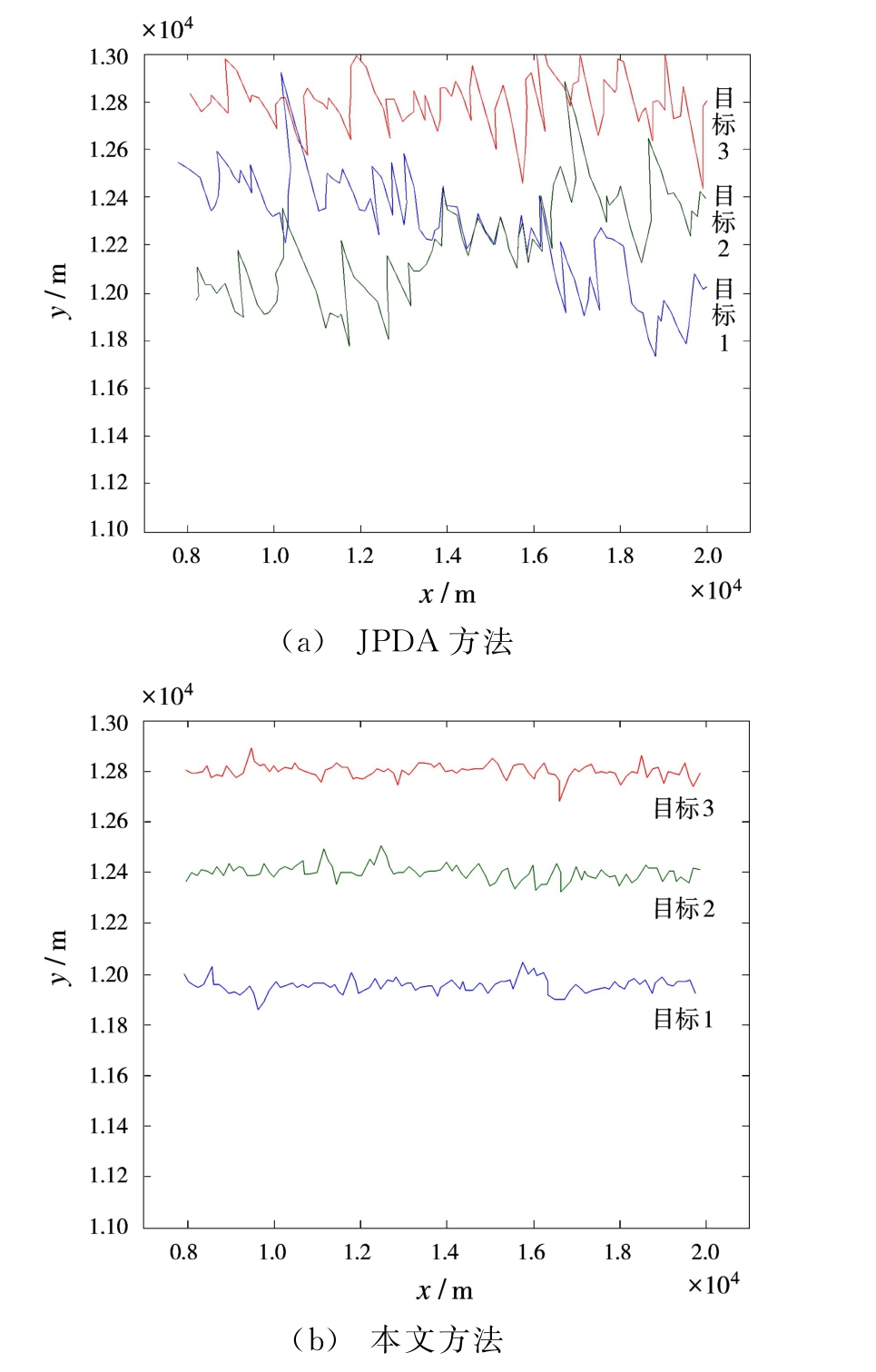
图5 仿真结果示意图
1)提高关联准确率
上述仿真实验验证了本文方法的有效性,现借助于某实验平台采集的数据,进一步验证本文所提方法的优越性。两个目标的态势如图6所示,其中一个目标由南向北运动,另一个目标由北向南运动。雷达位置固定在某点,其他参数设置与仿真环境一致。
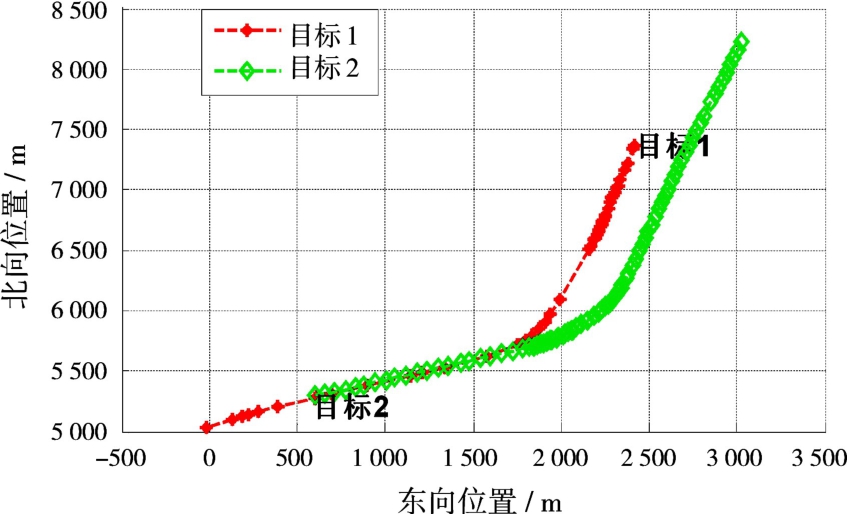
图6 目标运动态势图
当两个目标运动到某一个位置时,两目标会靠得比较近,这会对数据关联带来一定的压力,容易使目标跟偏。这种情况下,利用AIS信息可以很好地解决此类典型问题。跟踪结果如图7所示,跟踪结果转换到以载机为原点的极坐标系中。原始方法是指没有采用AIS信息的跟踪方法,从图中可以看出,两个目标相交时,原始方法中的两条航迹明显出现串扰。这主要是由于密集目标的回波CFAR测量值作波束内相关时,小角度合并出现了问题,因此波束内相关后会出现将测量值合并到中心的情况,容易造成航迹串扰。但将AIS信息引入后,两个目标的航行路径已明显区分,因此通过AIS航迹将雷达航迹进行纠正后,可以有效阻止雷达航迹与测量值进行误相关,航迹的串扰现象得以消除。这说明AIS可以用于辅助雷达多目标跟踪中的数据关联。
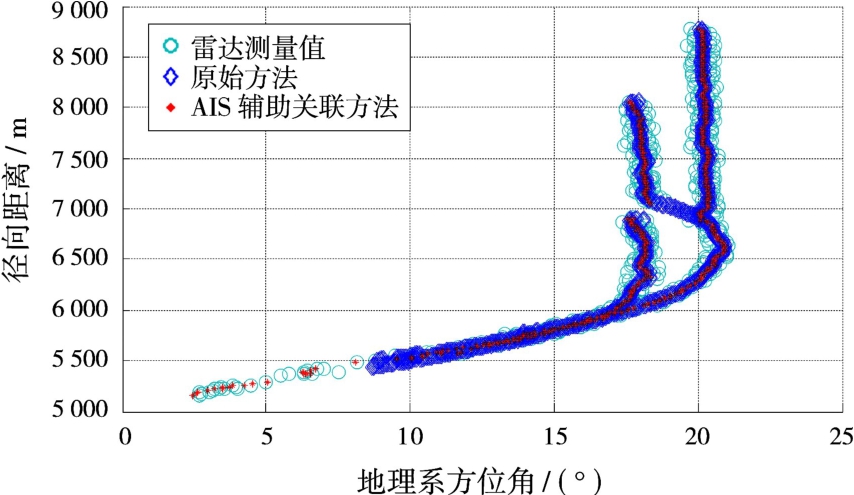
图7 跟踪效果对比图
2)提高航速航向精度
为验证本文方法提高了航速航向精度,选取其中某单一航迹场景进行说明,数据同样来自于岸基试验。图8所示的目标为一民船目标,由南向北慢速运动中,雷达同样固定在上述位置。

图8 跟踪效果图
实际跟踪的效果图如图9所示,其中原始方法为单纯的JPDA法,AIS辅助关联方法即为本文所提方法。从图中可以看出,两种方法均能稳定跟踪,但本文提出的方法精度显然更高。采用AIS辅助关联方法后,目标的航速和航向的收敛时间明显减小,且其稳定性也比原始方法提高许多,表明了本文方法的有效性。
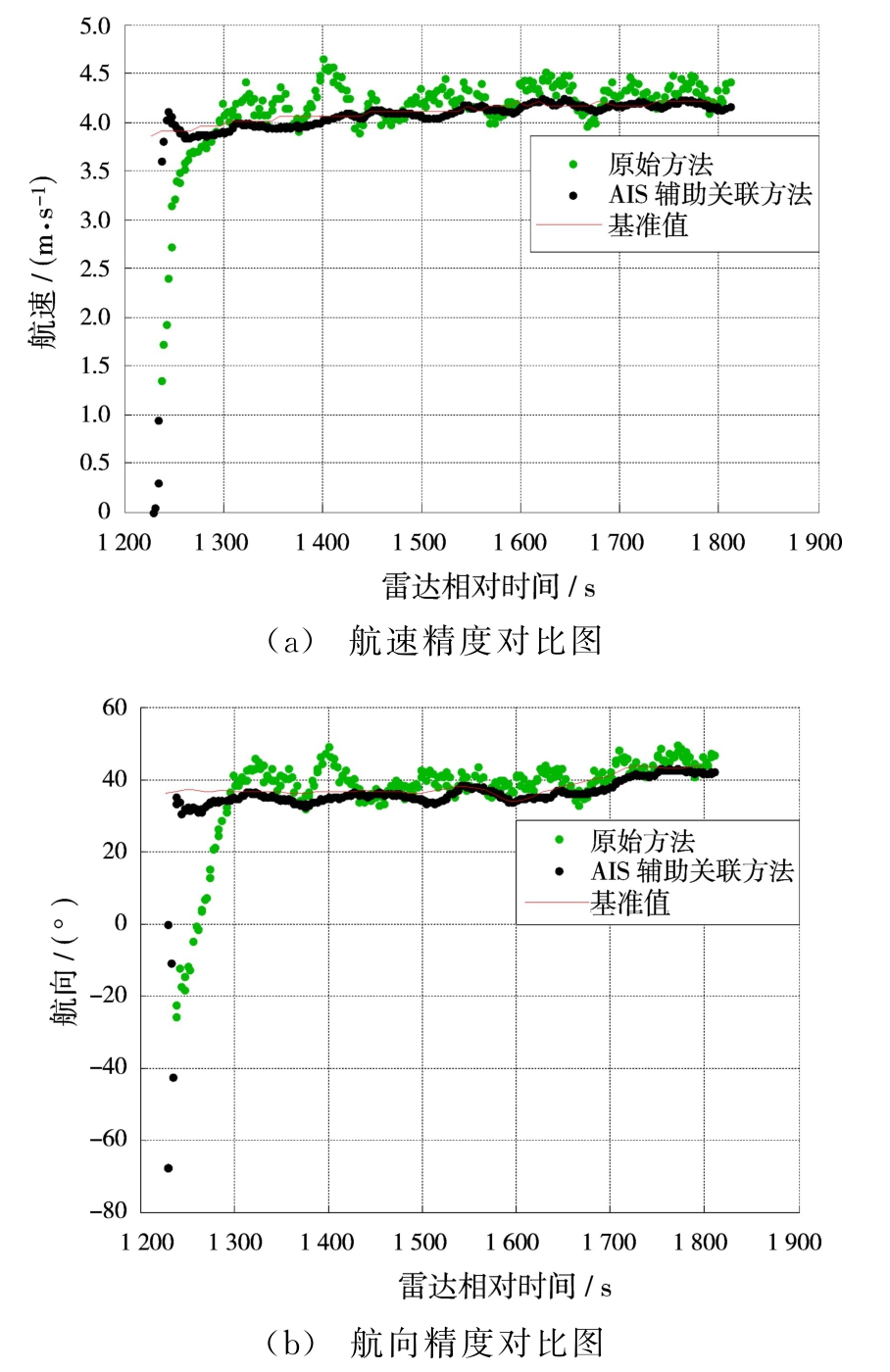
图9 航速航向精度对比图
本文提出了一种基于AIS信息的雷达航迹融合跟踪方法,可有效适应海面密集目标环境下的多目标跟踪。通过分析AIS航迹和雷达航迹的测量精度,将两者更好地进行融合,在此基础上,通过融合后航迹以及AIS信息设计出一种双波门关联准则,提高落入双波门的测量值置信度,从而增大了源于目标的测量值的关联概率,降低了虚警和杂波对雷达航迹的影响,有效地解决了密集回波环境中多目标跟踪数据关联的问题,提高了航迹稳健性和跟踪精度,最后通过仿真和实测数据验证了本文方法的有效性。下一步将重点研究本方法的工程化实现问题,在现有硬件的基础上,通过软件升级,重点解决海量AIS航迹处理复杂度的问题,提升装备的实用性。
参考文献:
[1]何友,修建娟,关欣.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013:120-147.
[2]张存,郑世友,缪礼锋,等.基于信号幅度的复杂目标新数据互联方法[J].雷达科学与技术,2016,14(4):411-416.
[3]SONG T L,KIM H W,MUSICKI D.Iterative Joint Integrated Probabilistic Data Association for Multitarget Tracking[J].IEEE Trans on Aerospace and Electronic Systems,2015,51(1):642-653.
[4]YU Juan,WEI Shaoming,WANG Jun.Data Association Method Comparison with Amplitude Information[C].IET International Radar Conference,Xi’an:IET,2013:1-4.
[5]占荣辉,张军.特征辅助数据关联研究综述[J].系统工程与电子技术,2011,33(1):35-41.
[6]王云奇,孔令讲,易伟,等.一种耦合检测和JPDA滤波的多目标跟踪算法[J].雷达科学与技术,2014,12(2):143-148.
[7]船载自动识别系统(AIS)技术要求:GB/T20068-2006[S].北京:中国标准出版社,2006.
[8]汪洋,罗军.五种常用航迹关联算法在AIS与岸对海警戒雷达航迹关联中的仿真分析[J].论证与研究,2010(3):23-26.
[9]田威,王钺,山秀明,等.稳健的联合航迹关联与系统误差估计[J].清华大学学报(自然科学版),2013,53(7):946-950.
[10]于海霞,付才魁,林敏.AIS与军用雷达目标航迹整合算法研究[J].军事交通学院学报,2009,11(5):91-94.
[11]关劲.基于模糊理论的雷达/AIS目标数据融合方法[J].舰船科学技术,2010,32(9):67-71.
A Method of Multi-Target Fusion and Tracking for Sea Surveillance Radar Based on AIS
HE Fengshou,MIAO Lifeng,TAO Feixiang,ZHANG Cun
(AVIC Leihua Electronic Technology Research Institute,Wuxi214063,China)
Abstract:For the great difficulty of data association and low tracking accuracy in the intensive target tracking of sea surface,a track fusion method based on automatic identification system(AIS)information is proposed in this paper.Firstly,the fusion coefficients are calculated according to the measured value of AIS and the measurement noise level of radar,which can ensure rationality of fusion data.Then the data association of double gates is made by use of the fusion track for the measured value of radar,which can optimize the data association method,improve the confidence level of target measurement value,and reduce the influences of false alarm and clutter.Thus,the track robustness and the tracking accuracy are improved.Finally,the validity and superiority of the method is proved by simulation data and actual measurement data.
Key words:dense sea target tracking;track fusion;AISinformation;data association
中图分类号:TN953;TN957
文献标志码:A
文章编号:1672-2337(2017)02-0153-06
DOI:10.3969/j.issn.1672-2337.2017.02.008
收稿日期:2016-08-29;
修回日期:2016-11-07
基金项目:航空基金(No.2014ZC07003);中航工业技术创新基金(No.2014D60720R)
作者简介:

贺丰收男,1979年生,湖南常德人,硕士研究生,中航工业雷华电子技术研究所高级工程师,主要研究方向为机载雷达系统、雷达数据处理、相控阵雷达资源管理。
缪礼锋男,1986年生,江苏江阴人,硕士研究生,中航工业雷华电子技术研究所工程师,主要研究方向为相控阵雷达资源管理及密集目标跟踪技术。

陶飞翔男,1991年生,江苏南通人,硕士研究生,中航工业雷华电子技术研究所工程师,主要研究方向为相控阵雷达跟踪与识别技术。

张 存男,1989年生,山东济宁人,硕士研究生,中航工业雷华电子技术研究所工程师,主要研究方向为相控阵雷达资源管理及海面密集目标跟踪技术。E-mail:524941326@qq.com