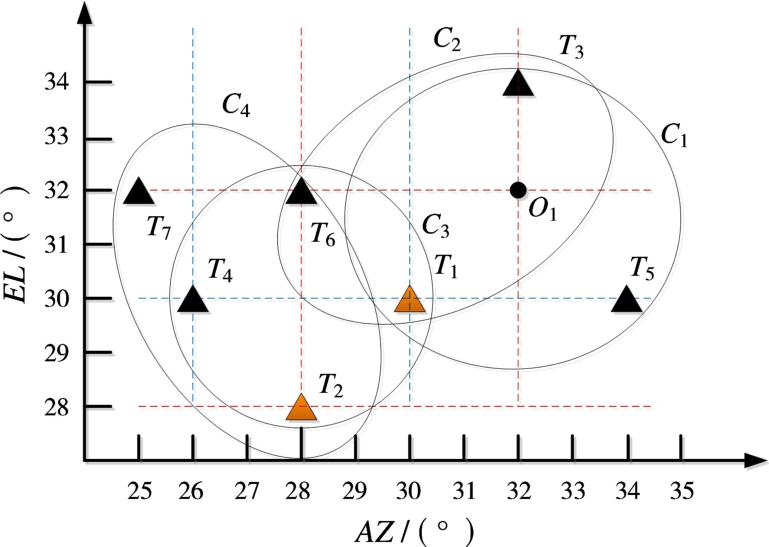
图1 波位调度法目标分群示意图
陈 帅,娄元芳,张世仓
(中国航空工业集团公司雷华电子技术研究所,江苏无锡214063)
摘 要:针对空面目标组网雷达协同调度的资源优化分配问题,通过分析不同目标的重要性、RCS和跟踪质量对调度资源的差异化需求,以组网系统探测效益为优化目标,构造了一种基于波位调度的动态规划模型。利用改进的拍卖算法对该模型求解各雷达最优的波位分配,在满足不同类型目标对跟踪资源需求的同时,降低了组网系统总体波束资源的消耗。该方法解决了多雷达目标调度中资源分配和冲突消解的协同问题,降低了计算量,提高了时间和能量两种资源的合理分配和有效利用率,实现了组网系统高效的波束资源管理。通过仿真验证,证明了所提模型的正确性和算法的有效性。
关键词:雷达组网;波束调度;拍卖算法;多维分配
空面目标一般分布密集,且目标个数较多。在组网雷达目标调度中,存在着两个显著问题:1)由于目标个数较多,要完成所有目标调度更新,会耗费大量的时间资源,且目标调度更新率不高;2)多个雷达往往重复调度同一目标,难以做到资源的优化管理,造成雷达波束能量资源的浪费。在有源相控阵组网雷达中,任何一部雷达的探测资源都是有限的,如何利用其有限的能量和时间资源获得更高的调度性价比就成为相控阵雷达探测跟踪研究的重要课题之一。
针对空面目标相控阵雷达组网波束调度问题,国内外学者进行了相关研究,然而由于传感器资源管理技术起步较晚,目前成熟的方法不多。文献[1]提出一种连续双拍卖参数选择(CDAPS)算法来解决雷达资源管理和任务运行参数选择问题;文献[2]基于波位动态聚类及分区识别算法建立了相控阵雷达的群目标调度模型;文献[3]将标准的Q-RAM算法从单雷达扩展到多雷达情形中,管理整个雷达网的资源,消除资源冗余现象,增加跟踪的目标数目,提升航迹的估计精度。
以上研究可以分为两类:多目标调度和群目标调度。群目标调度是基于群跟踪的,由于群跟踪技术工程实现并不成熟,目前应用到的工程实践的场合不多,大多还是常规的多目标调度跟踪。对于这类问题,传统的目标调度法是以目标为探测中心,更多的是解决雷达时间资源的优化。由于波束宽度的限制,无法覆盖到更多想要关注的目标,必然会导致雷达波束或者能量资源的浪费。本文从节约雷达时间和波束资源两个方面出发,提出了一种基于波位调度的资源调度技术,以单次雷达调度效益为优化目标,通过建立雷达组网下目标分配模型,利用改进的拍卖算法进行分配求解,从而获得每个雷达的最优波位分配,该方法可以有效提高雷达波束能量资源的利用率,减少时间资源的浪费。
本文研究的是组网雷达以时间资源和波束资源为约束条件,对空面目标进行调度资源优化分配问题。对单个雷达而言,某时刻决策的调度目标是基于最优时间资源约束的,却不一定是系统波束资源最优的。波位调度法的核心思想是雷达调度某目标时,不一定选择目标位置为探测中心,而是使目标在波束内的任意位置。在调度目标能被检测到的同时,可以获得更多“有价值”的目标回波,从而使组网系统获得更高的探测效益。在选择调度波位时,首先根据调度目标周围的目标是否与调度目标在同一波束内进行分群,然后将群内不同重要性、雷达散射截面积(RCS)和跟踪质量的目标转化为等效的普通目标,寻找群内“等效目标”数目最多的波位。这里值得一提的是,不同的调度目标类型不同,波位的选择自由度也不同。一般而言,关注度较高的调度目标,调度中心应尽可能靠近该目标,降低探测概率的损失。在多雷达组网中,尤其是多个雷达调度的目标很近,探测波束发生交叉重叠时,该问题变得尤为复杂。
如图1所示,假设雷达网内有2个雷达P1和P2,方位AZ和俯仰EL波束宽度都为4°,分别进行目标的调度与探测,并将探测到的目标信息经过时空配准后送往融合中心,融合中心经过计算后对P1,P2进行信息共享和资源分配。k-1时刻融合中心有7个目标,它们的角度方位和俯仰分别是T1(30°,30°),T2(28°,28°),T3(32°,34°),T4(26°,30°),T5(34°,30°),T6(28°,32°),T7(25°,32°)。若P1和P2计算出k时刻需要调度的目标分别为T1和T2,融合中心根据目标分布位置和雷达波束宽度,如果按照单次探测数目最多的原则进行分群处理,那么可以分为4个群:C1{T1,T3,T5},C2{T1,T3,T6},C3{T1,T2,T4,T6},C4{T2,T4,T6,T7}。其中,C1,C2,C3是由调度目标T1构建的群,C3,C4是由调度目标T2构建的群。由图1可见,群和群之间是有重叠的,每个群内部都可以划分为1个(如C1群的O1)或多个波位,且存在P1,P2共享波位的情况,如C3群内的波位。对于这种情况,如何组群并选择波位的最优分配,保证雷达网的单次探测效益最大,是接下来要研究的关键问题。
图1 波位调度法目标分群示意图
假设k-1时刻,第i(i=1,2,…,S)雷达方位波束宽度为![]() 俯仰波束宽度为
俯仰波束宽度为![]() 跟踪目标航迹集合为T,跟踪目标数目为N,k时刻第i部雷达要调度的目标为
跟踪目标航迹集合为T,跟踪目标数目为N,k时刻第i部雷达要调度的目标为![]() 表示由调度目标ti构建的目标航迹群,j(j=1,2,…,W)表示所有群可选择的波位集合。
表示由调度目标ti构建的目标航迹群,j(j=1,2,…,W)表示所有群可选择的波位集合。
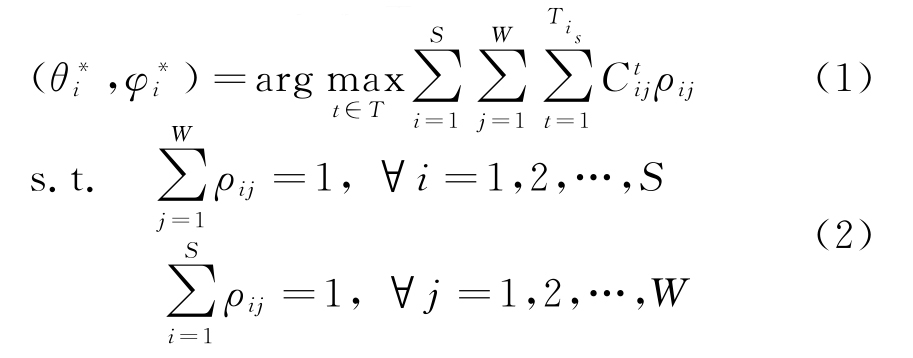
建立如下的调度模型:
式中,![]() 对应第i部雷达要调度的最优波位,且有
对应第i部雷达要调度的最优波位,且有![]()
![]() 不考虑角度噪声影响。若调度目标ti是关注目标
不考虑角度噪声影响。若调度目标ti是关注目标![]() 还应满足
还应满足![]()
![]() 是波位与调度目标的角度差的门限值,表示此时波束中心不能距离调度目标太远。
是波位与调度目标的角度差的门限值,表示此时波束中心不能距离调度目标太远。
ρij是一个二进制变量,有

ρij组成约束矩阵,约束条件式(2)代表了不同雷达之间波位分配时的基本原则:
1)一部雷达最多选择一个波位进行调度;
2)一个调度波位最多同时被一部雷达选择,这是基于效益最大化的原则。
![]() 为分配价格函数,表示第i部雷达以第j个波位为调度中心时波束范围内的目标t的代价值,它是由下式获得:
为分配价格函数,表示第i部雷达以第j个波位为调度中心时波束范围内的目标t的代价值,它是由下式获得:
式中:ζt,ηt,γt分别表示目标t不同类型属性(重要性、RCS以及跟踪质量);J表示根据不同目标类型属性将波束内目标个数转化为等效的普通目标个数,它代表探测的收入,D表示根据波束内目标t偏离波束中心(θ,φ)带来的探测概率损失等效为普通目标个数,它的大小也与目标t类型相关。J和D的计算方法将在2.2节给出。
式(1)是在约束条件下求取组网系统探测最多的等效目标个数,即最高的探测效益,它一个典型的多维目标分配问题,本文拟采用一种改进的拍卖算法求解该模型。
拍卖算法是一种快速有效的多智能体协调机制,可操作性好,其本质上属于搜索树算法[4-5]。拍卖算法包含两种智能体:拍卖智能体A和竞拍智能体B。拍卖智能体A代理任务进行拍卖,竞拍智能体B则根据自身资源和任务特点投标。通过拍卖,拍卖智能体A通过价格最高的原则确定所有竞拍的优胜者,优胜者将共同协作完成任务T,从而实现智能体与任务之间的映射,即完成多个智能体之间的任务分配。拍卖算法的流程如图2所示。
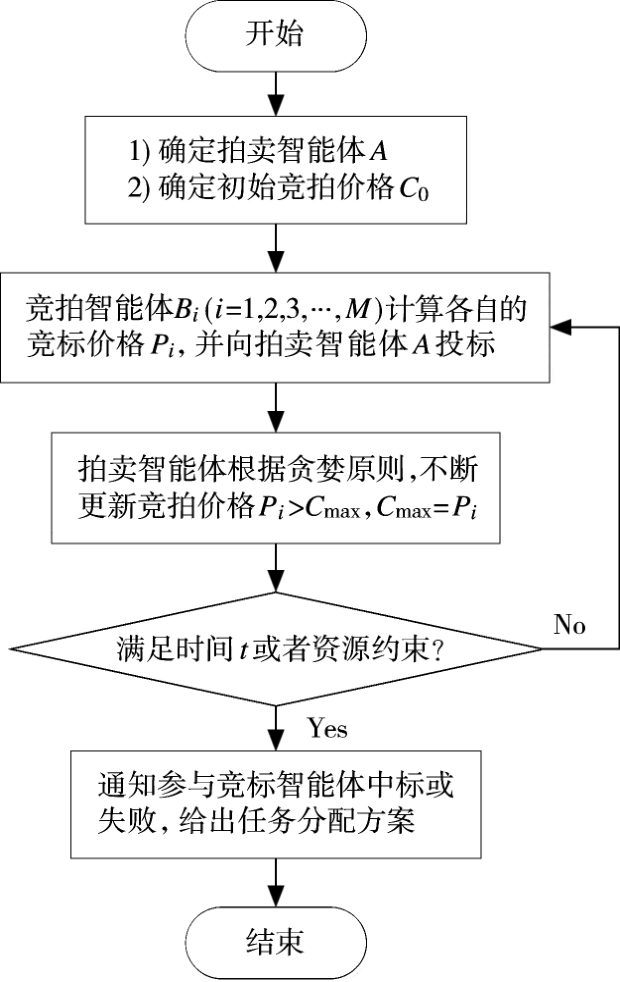
图2 拍卖算法流程
拍卖算法是一种快速而有效的分布式资源分配方法,可以用来求解本文所提出的模型,拍卖智能体相当于组网雷达总体探测效益,也就是动态模型目标最大值。而竞拍智能体是网内雷达,投标价格对应各雷达调度各波位的价格,拍卖智能体对各雷达提交的投标集进行搜索,并在约束条件内基于总体“效益”最高的原则处理资源的分配冲突,协商完成波位的选择。当参与投标的雷达较多或者总的波位较多引起同一波位竞争时,拍卖算法所需协商的次数就会迅速增大,算法的寻优循环时间就会加大,实时性变差。
假设k时刻第i部雷达调度目标为A(θ,φ),根据拍卖算法的效益定义,在所有参与分配的波位中,第i部雷达调度第j个波位所获得的探测收入定义为

式中,Tn为波位j对应的波束内目标航迹群,δt为根据目标类型属性转化为普通目标的转化因子,ζt,ηt,γt分别为目标t的重要性、RCS、跟踪质量等类型属性对应的“等效目标”数目。为了消除不同量纲的影响,对这些类型属性进行规格化处理。Jij越大,探测j波位带来的收益越大。
重要性属性对应的“等效目标”个数为

定义普通目标类型ζ1=1,k为重要性转化系数,一般取k=5,可根据实际调节。
目标RCS属性对应的“等效目标”个数计算如式(8):
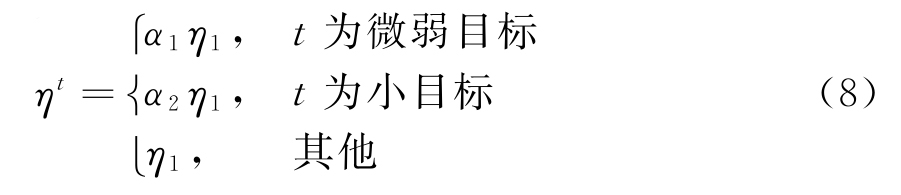
这里给出参考定义RCS≤1 m2为微弱目标,RCS≥10 m2为中等以上目标,这之间为小目标。η1=1,α1,α2为RCS转化系数,参考可取α1=3,α2=2,可根据实际调节。
对于跟踪质量等级,没有现成的计算公式。本文采用文献[7]中Van Keuk公式目标回访时间T来反映跟踪质量的差异。在实际雷达工作中,由于目标跟踪精度要求和雷达性能的限制,采样间隔将会限制在[Tmin,Tmax]内,跟踪质量等级指标归一化可由式(9)完成:
式中,γ∗代表跟踪质量的归一化值,它的数值反映了跟踪质量的好坏。γ∗越大,跟踪质量越好。γ∗各等级对应的“等效目标”个数如下:

根据跟踪质量等级划分,参考可取γ1=3,γ2=2,γ3=1,其值可根据实际调节。
以上的“等效目标”个数和探测收入指标性数值,只是为了便于定量分析而提供的一种方法,并不代表实际数值。
波位调度与目标调度的区别在于,目标可能并不位于波束中心处,这就可能会引起一定的检测概率的下降,离波束中心越远,探测概率下降越明显。因此,需要计算调度波位j(θ∗,φ∗)的分配代价。
根据文献[8],波束中心点方位和俯仰为(u0,v0),对应信噪比为SNR0,波束内任意一点(u,v)的信噪比SNR可由下式给出:
式中,B为波束宽度。
若(u0,v0)处的检测概率为PD0,对应(u,v)处的检测概率PD如下式:
式中,PF为虚警概率,由式(11)和式(12),可以推导出
令![]() 则有
则有
令![]() 把式(11)代入式(14),可得
把式(11)代入式(14),可得
式中![]()
取PF=1.0×10-3,波束中心点检测概率PD0=0.85,对应信噪比SNR0=42 dB。波束宽度B=4°时,假定波束中心(u0,v0)=(0°,0°),u∈[0°,2°],v∈[0°,2°]。以0.5°为波束跃度分别在方位和俯仰维对波束中心单侧进行采样,可获得1~25组波位点。分别对应如下:
计算每组波位相对于波束中心概率比如图3所示。

图3 不同波位与波束中心的检测概率比
根据前面分析,雷达i调度波位j对应的代价Dij可由式(17)计算:

式中,Dij表示由于波束中心偏离目标引起的探测损失对应的等效目标数目,δt表示根据目标类型设定的损失目标数调节因子,计算方法见式(6)。在实际使用时,根据目标的重要性属性、RCS属性或者跟踪质量属性,δt可得到不同数值,但是由式(16)计算出的Dij不应大于由式(5)计算出的Jij。另外,若某时刻调度目标是关注目标时,可适当限制波位的搜索范围,以减小调度目标探测概率的损失。
根据前面分析,由式(4)可计算出第i部雷达调度第j个波位的竞拍价格Cij。因此,融合中心根据各雷达提交的投标价格,可以构建价格矩阵C为
式中,Cij为第i部雷达调度第j个波位的分配价格,矩阵维数为S×M,S为雷达个数,M为总的波位个数,它代表了与调度目标在同一个波束内所有的波位。
在对式(1)求解的过程中,可以看到,求解的复杂度与雷达个数和波位个数(尤其是共享波位的个数)是密切相关的,当共享波位个数M较多时,利用传统的拍卖算法[9]的计算量就会急剧增加,搜索次数为S×M。因此,针对这种情况,本文采用一种定向排序法缩短寻找最优解的时间。
综上所述,基于改进拍卖算法的组网雷达波位调度方法的实现步骤如下:
1)初始化:确定参与目标调度的雷达数S和雷达可观测的波位集合W,设定拍卖效益函数J。
2)拍卖开始,根据式(5)和式(16),计算雷达对波位的分配效益函数J和代价矩阵D。
3)根据式(4)计算参加调度的组网雷达调度各波位的价格矩阵C和约束矩阵ρ,并把价格从高到低进行排序。
4)根据式(1)计算各配对中总体效益最高的,查看是否有共享波位的情况。如果有,若S≥M,则搜索各波位找效益最高雷达,搜索次数为N=M·(M+1)/2;若S<M,则搜索各雷达找效益最高的波位,搜索次数为N=S·(S+1)/2。直到找到各雷达都不共享波位且分配中总体效益最高的那组分配或者满足退出条件。
5)当无法找到满足最优分配时,选择初始的调度目标方案,完成拍卖并退出。
定向排序拍卖法相比于传统的搜索拍卖法效率更高,寻优计算复杂度由o(n2)变为o(n2/2)。针对求解本文中的多维分配模型,可以获得更好的效果。
假设某海面上3个机载雷达从不同方向对海面舰船、游艇等20个目标进行组网调度探测跟踪,其中包含3个合作(关注)目标。目标1为重要目标,RCS=20 m2;目标2为普通目标,RCS=30 m2;目标3为重要性微弱目标,RCS=1 m2;其他均为普通且RCS≥20 m2的目标。各雷达将独立探测到的回波测量送往融合中心经过时空配准后下发给各个雷达进行滤波,调度中心根据各雷达返回的跟踪目标信息和其他信息进行综合调度并下发各雷达调度指令。不考虑测量噪声,各雷达采样间隔为50 ms,雷达量程为360km,仿真总时长为1 250 s。各机载雷达与目标的初始位置和运动态势如图4所示。
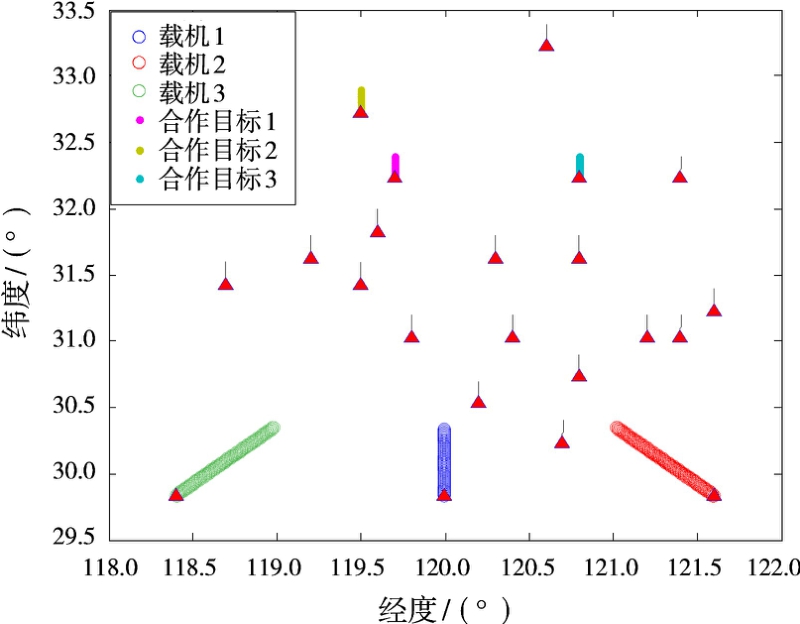
图4 组网机载雷达和目标运动态势图
下面分别利用传统的目标调度法[6]和本文提出的波位调度法对组网雷达进行探测跟踪调度,以载机1平台为例研究两种方法下不同类型属性的目标跟踪性能和雷达跟踪波束资源的使用情况。
由图5可以看出,两种方法下探测回波虽有差异,但均可全程稳定跟踪所有目标。各类型目标总体资源调度情况如图6所示。
从图6可以看出,两种方法雷达各个时刻调度目标是有差异的,且调度频率也有差异。调度方法的优劣反映在回波数据率和跟踪效果上,下面以3个关注目标(6号航迹、10号航迹、12号航迹)和1个非关注目标(5号航迹)为例重点分析不同类型目标的跟踪性能和资源使用情况,结果如表1所示。
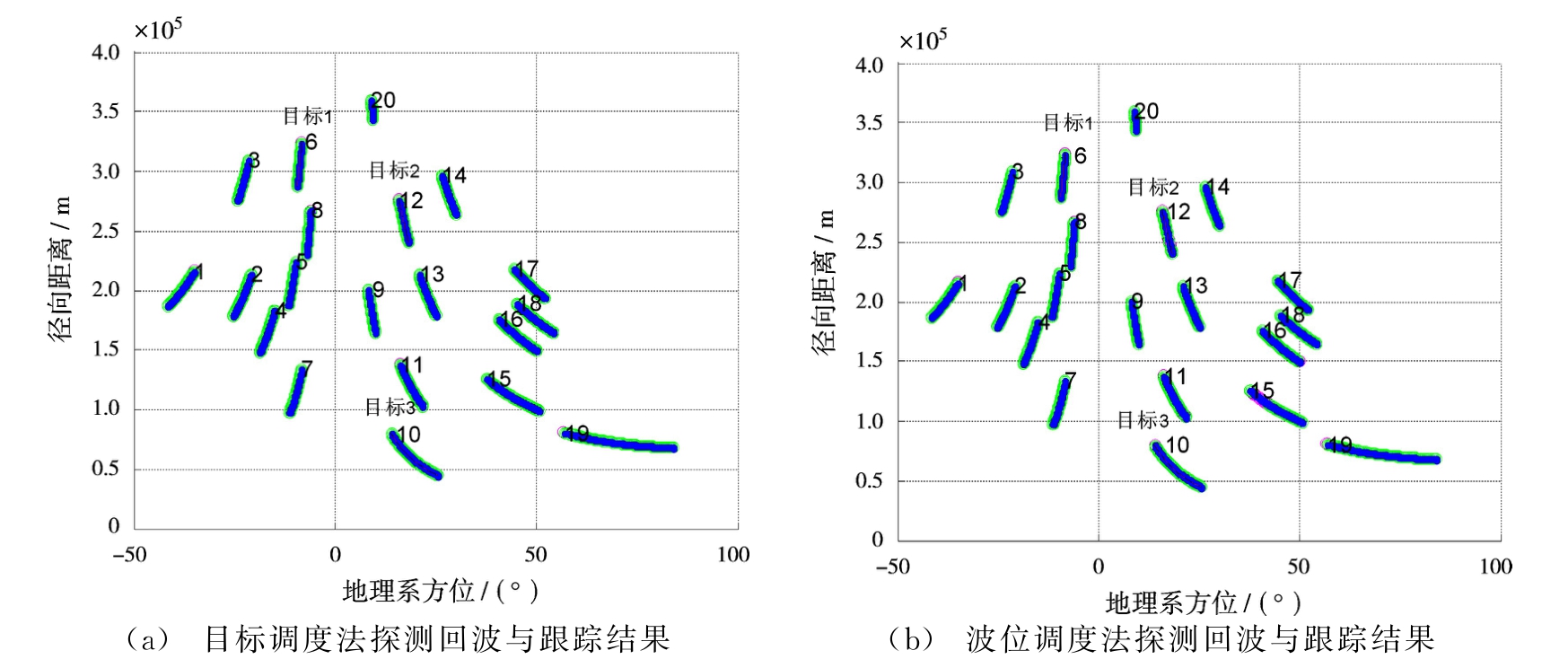
图5 两种方法下雷达1探测跟踪结果
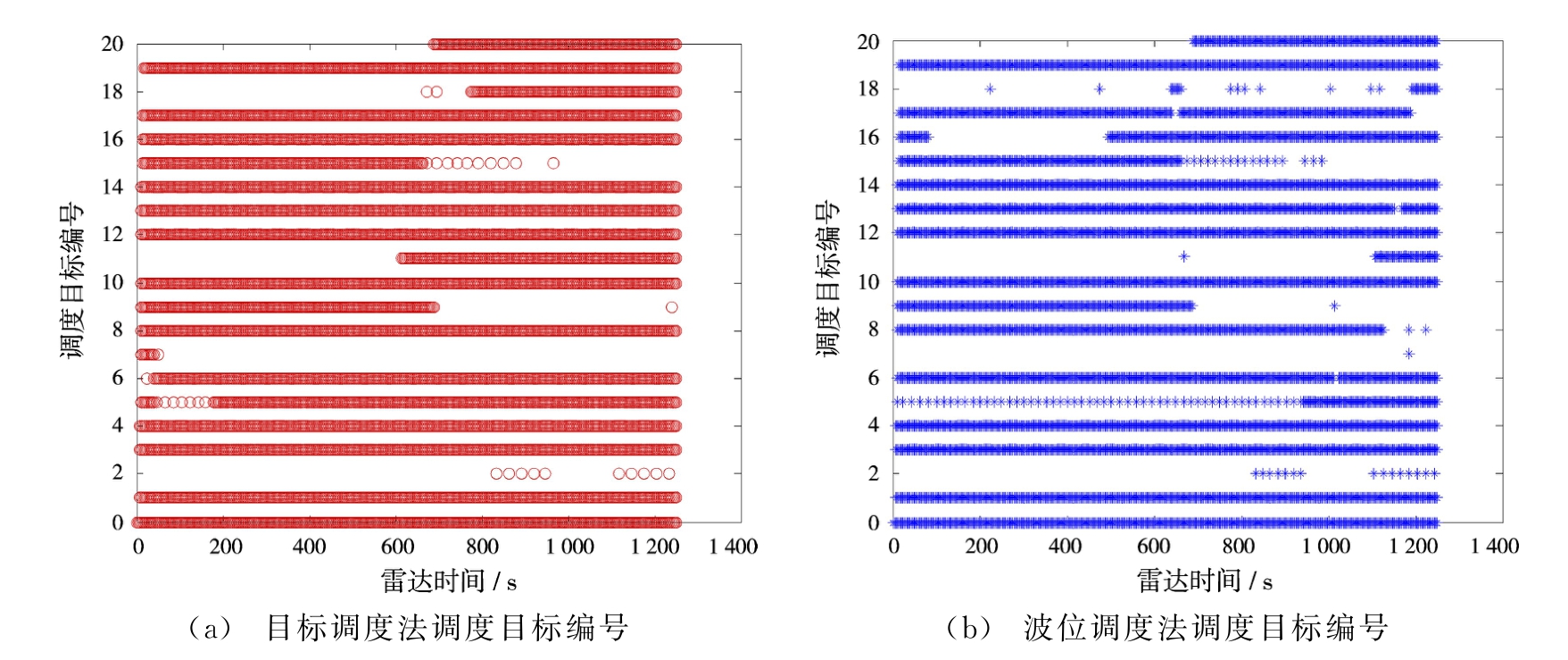
图6 两种方法下雷达各时刻调度目标编号
表1 两种方法下不同类型目标航迹跟踪误差(RMSE)与调度资源使用情况对比
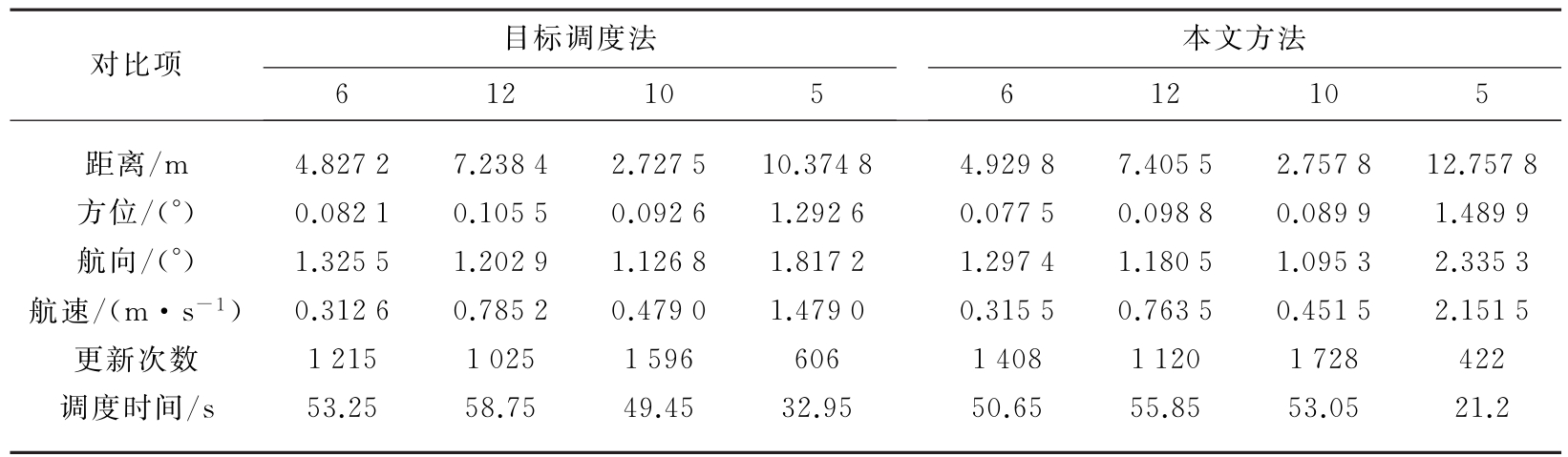
从表1可以看出,对于关注目标而言,相比于目标调度法,本文方法目标航迹关联更新的次数更高,说明目标在波束内的频率更大,波束使用效率更高。以10号航迹为例,距离精度降低了1.11%,方位角精度提高了2.9%,航向角精度提高了2.8%,这说明了本文方法的跟踪精度相比传统目标调度法虽略有提高但总体相差不大;对于非关注目标而言,本文方法虽然精度有所下降,但仍然能保证维持航迹正常跟踪所需的探测资源。
对于普通目标5号航迹,目标调度法总调度32.95 s,本文算法总调度21.2 s,调度时间资源减少64%。然而由表1,关联更新次数仅减少30%,说明5号航迹不需要依赖专门的调度资源也可以通过本文的波位调度法获得更多的探测资源。
从图7可以看出,本文方法对合作目标和非合作目标调度间隔进行了区分,对于重点关注目标1,将分配更多的资源对其进行跟踪回照,以满足高精度的跟踪,两种方法调度频率相差不大。对普通目标5号航迹,则只需要满足维持航迹生存的一般调度频率即可。而对于非关注的普通目标,本文算法调度间隔更大,耗费的资源更少。
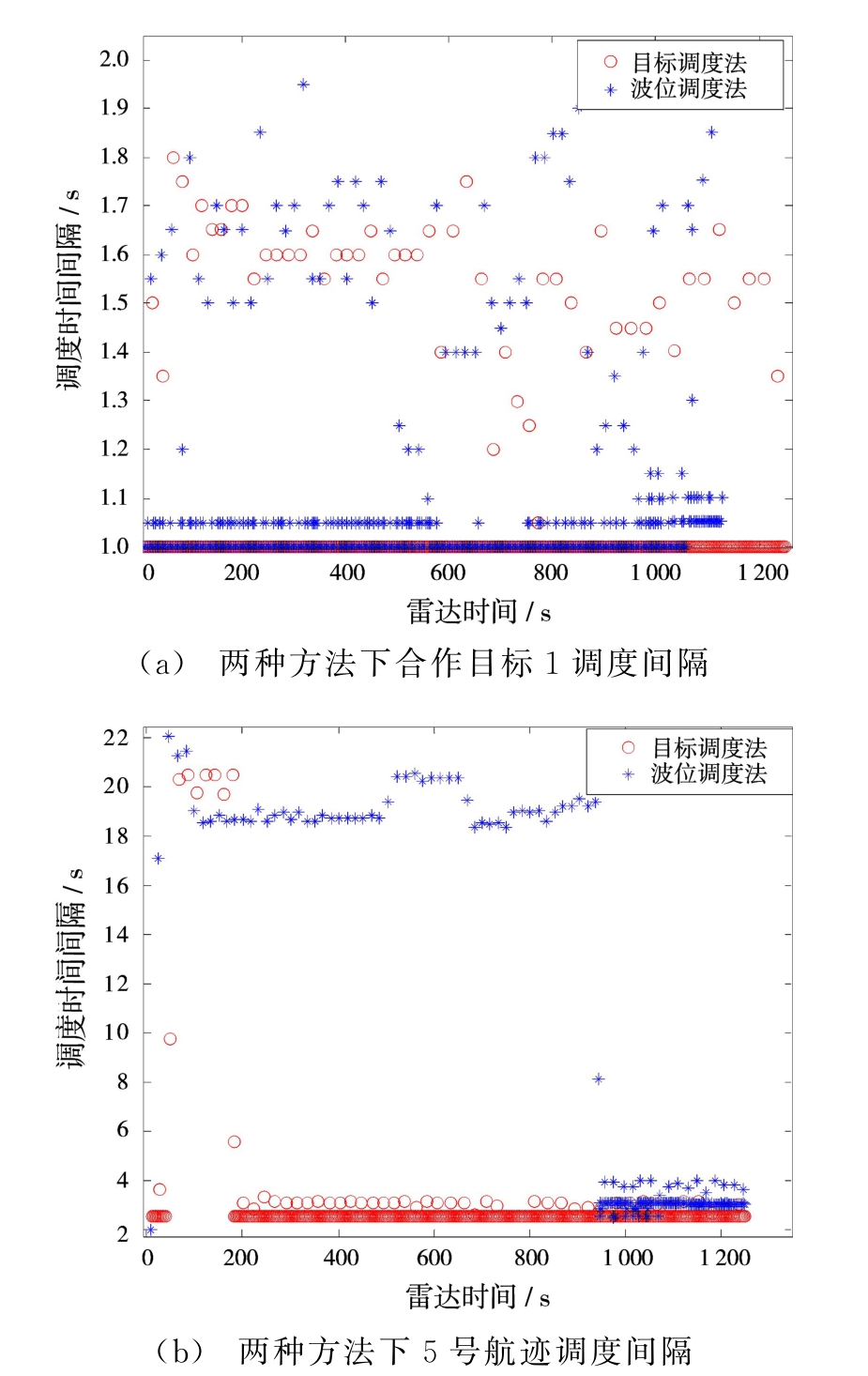
图7 两种方法下不同重要属性目标的调度间隔
假定雷达任务只有搜索和跟踪,可以看到两种任务总的执行时间的分配比例如图8所示。
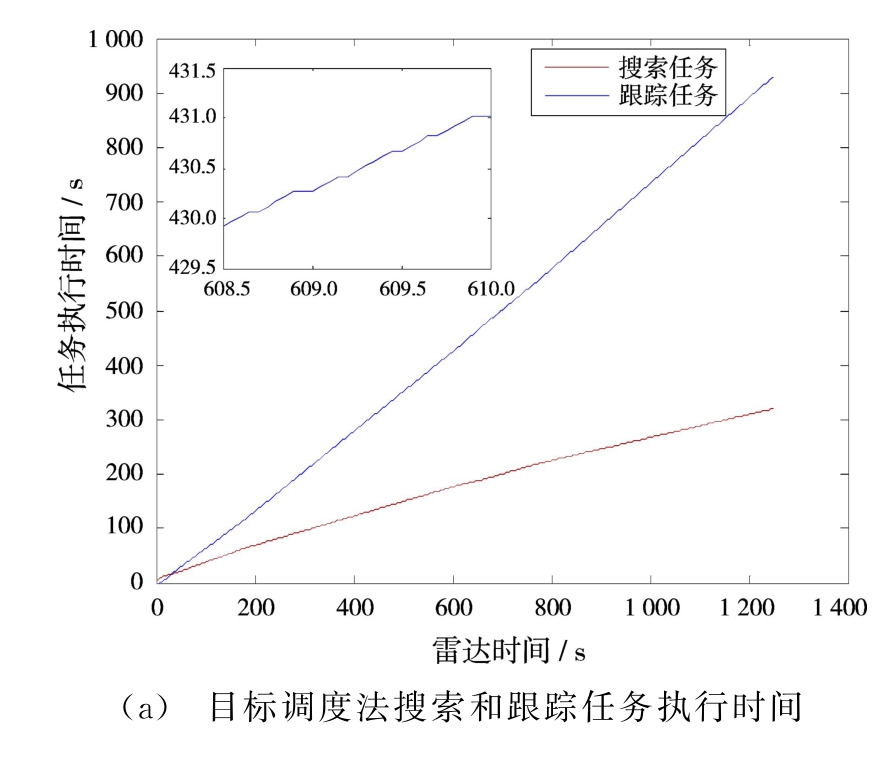
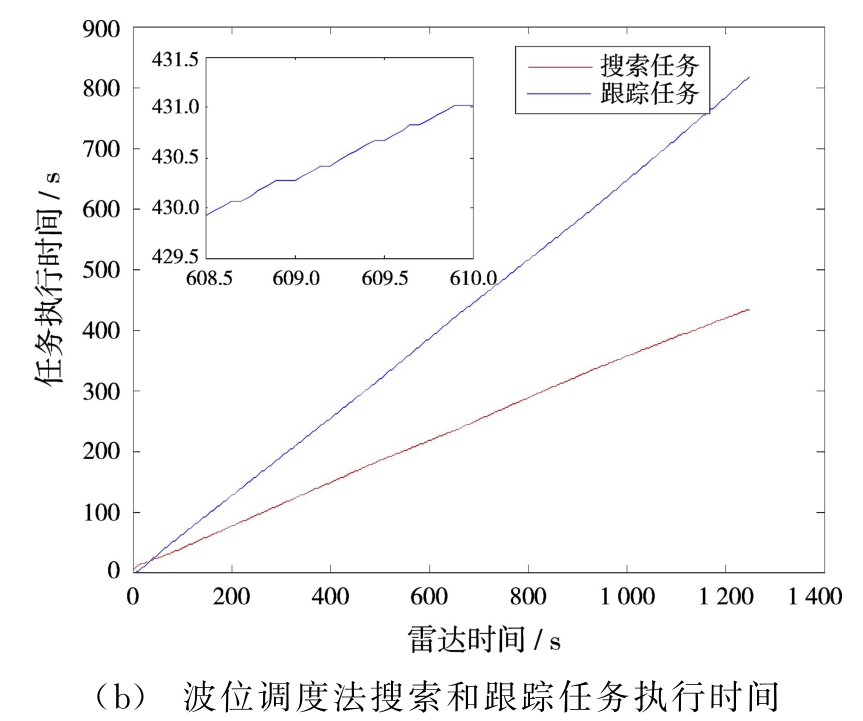
图8 两种方法下搜索和跟踪任务执行时间
采用本文方法跟踪调度时间为824 s,相比目标调度法减少12%。总之,与传统的目标调度法相比,本文算法在保证不同类型目标跟踪性能的同时,组网系统总的跟踪调度资源消耗更少,雷达可以有更多的资源执行搜索任务或者其他任务。空面目标分布越密集,本文方法下系统的资源利用率越高。
目标分配是雷达组网资源管理中的重要环节,在复杂的战场环境下,对目标的分配方案中,除了考虑雷达的探测性能外,还要充分考虑雷达运用的战术规则,以最少的雷达资源实现对目标的可靠探测,降低敌方雷达的截获率。本文综合考虑目标各种类型属性对探测资源的需求,建立了多雷达组网探测过程中的波位调度分配模型,并提出一种定向排序递归的拍卖改进算法进行寻优。该方法可以大幅减少网内雷达协商的次数,在不降低关注目标跟踪精度前提下,减少了调度资源的浪费,提高了雷达波束资源利用率,是一种实用且快速的资源优化分配方法。
参考文献:
[1]CHARLISH A,WOODBRIDGE K,GRIFFITHS H.Phased Array Radar Resource Management Using Continuous Double Auction[J].IEEE Trans on Aerospace and Electronic System,2015,51(3):2212-2224.
[2]黎海林,汤兵.基于波位聚类的相控阵雷达群目标调度模型[J].飞行器测控学报,2015,34(5):414-420. [3]NADJIASNGAR R,CHARLISH A.Quality of Service Resource Management for a Radar Network[C]∥IEEE Radar Conference,Johannesburg:IEEE,2015:344-349.
[4]LEE D H,ZAHEER S A,KIM J H.A Resource-Oriented,Decentralized Auction Algorithm for Multirobot Task Allocation[J].IEEE Trans on Automation Science and Engineering,2015,12(4):1469-1481.
[5]林军,倪宏,孙鹏,等.一种基于多标拍卖的资源分配算法[J].北京理工大学学报,2015,35(3):279-283.
[6]KUO T W,CHAO Y S,KUO C F,et al.Real-Time Dwell Scheduling of Component-Oriented Phased Array Radars[J].IEEE Trans on Computers,2005,54(1):47-60.
[7]BENOUDNINE H,KECHE M,OUAMRIAND A,et al.Fast Adaptive Update Rate for Phased Array Radar Using IMM Target Tracking Algorithm[C]∥IEEE International Symposium on Signal Processing and Information Technology,Vancouver,BC:IEEE,2006:277-281.
[8]HONG S M,JUNG Y H.Optimal Scheduling of Track Updates in Phased Array Radars[J].IEEE Trans on Aerospace and Electronic Systems,1998,34(3):1017-1022.
[9]费爱国,张陆游,丁前军.基于拍卖算法的多机协同火力分配[J].系统工程与电子技术,2012,34(9):1829-1833.
An Optimal Beam Resource Assignment Model of Radar Network
CHEN Shuai,LOU Yuanfang,ZHANG Shicang
(AVIC Leihua Electronic Technology Research Institute,Wuxi214063,China)
Abstract:Aiming at the problem of resource allocation optimization for air-surface targets detection with netted radar cooperative beam scheduling,taking the detection efficiency of netted radar system as the optimization objective,the differentiated demands for resource scheduling by targets of different importance,RCS and tracking quality are analyzed.A dynamic programming mathematical model based on beam position scheduling is constructed.Then,the model is solved by the improved auction algorithm proposed in this paper.The total beam resource consumption of radar network is reduced while meeting the needs of different targets for tracking resource.This method solves the problem of coordination of multi-radar target assignment and scheduling conflict and reduces the amount of computation.The reasonable allocation and effective utilization of radar time and energy resource are improved and highly efficient beam resource management in network system is achieved.Through simulation,the correctness of the proposed model and the effectiveness of the algorithm in this paper are verified.
Key words:radar network;beam scheduling;auction algorithm;multidimensional assignment
中图分类号:TN958.92
文献标志码:A
文章编号:1672-2337(2017)02-0191-07
DOI:10.3969/j.issn.1672-2337.2017.02.014
收稿日期:2016-09-06;
修回日期:2016-11-30
基金项目:航空科学基金(No.2015ZC07004)
作者简介:

陈 帅男,1986年生,山东泰安人,硕士研究生,中航工业雷华电子技术研究所工程师,主要研究方向为雷达数据处理、多传感器数据融合。
E-mail:chenshuai666888@163.com
娄元芳男,1984年生,河南新乡人,硕士研究生,中航工业雷华电子技术研究所工程师,主要研究方向为数据处理、目标识别。
张世仓男,1975年生,安徽肥西人,博士研究生,中航工业雷华电子技术研究所高级工程师,主要研究方向为雷达数据处理、资源管理。