0 引言
在InSAR制图中,由于侧视成像机制与雷达和地面场景的几何关系,在地形有起伏的区域和城市区域将不可避免地出现阴影现象,这些区域的存在会严重影响DEM和DOM的质量。FMCW InSAR系统由于载机平台轻小,飞行高度比较低,要实现宽测绘成像,必须以低俯仰角工作,更加容易出现阴影现象,因此研究FMCW InSAR系统阴影区域的提取方法很有必要[1-4]。
目前,提取阴影区域的方法有很多种,从In-SAR数据来源角度来分,可以分为基于SAR幅度图像的提取方法、基于相干系数的提取方法和基于干涉相位梯度的方法。在基于SAR幅度图像的方法中,常用阈值分割的方法划分出亮度比较低的阴影区域,但由于地物信息复杂,再加上相干斑噪声的影响,难以确定合适的分割阈值,提取结果不稳定[5-6]。在基于相干系数的方法中,由于相干系数在计算的时候以窗口内的数据满足各态历经性这一假设为前提,所以会存在相干系数估计不准确的情况,导致提取结果有偏差[7],并且相干系数的阈值选取对提取效果影响比较大,需要人工选取阈值。
本文通过分析阴影区域的产生机理与干涉相位残差点的产生机理[8-9],提出了一种基于干涉相位残差点分布的FMCW InSAR阴影区域提取方法,残差点是由于噪声、阴影等引起的相位不连续而导致,因此可以利用残差点分布对阴影进行区域分割,以实现阴影区域的提取,且解决了基于相干系数提取方法的阈值依赖问题。
1 阴影区域干涉相位模型
阴影区域的形成机理如图1所示,阴影区域是由于被比较高的地形遮挡,造成没有回波数据,因此阴影区域的回波信号可以建模为高斯白噪声,相干性比较小,干涉相位中存在大量的残差点,可利用这一特点实现阴影区域的提取。

图1 阴影区域示意图
2 基于干涉相位残差点分布的阴影区域提取方法
2.1 干涉相位残差点形成机理
在理想条件下,干涉相位梯度的绝对值应该小于π,通过对缠绕干涉相位的梯度值进行积分,可以完成干涉相位解缠绕:

式中,C为缠绕干涉相位区域中任意一条连接r0和r的积分路径,2φ(r)为缠绕干涉相位的梯度值。然而在实际情况下,由于各种因素导致缠绕干涉相位的梯度值的绝对值会出现大于π的情况,称为相位不连续点,也被定义为残差点。
残差点的特征是缠绕干涉相位中相邻4个相位环路积分不为零。干涉相位残差点的形成主要是由于以下几个原因:
1)相位噪声的污染;
2)地形剧烈起伏使得相邻像素相位差的绝对值大于π;
3)地形遮挡使得某些像素没有真实的地形与之对应,即阴影(Shadow)现象。
因此,通过干涉相位残差点分布来提取阴影区域在理论上是可行的。
2.2 阴影区域提取流程
通过分析阴影区域的产生机理与干涉相位残差点的产生机理,本文提出一种基于干涉相位残差点分布的InSAR阴影区域提取方法,其处理流程如图2所示。该方法首先通过Sigma滤波对干涉相位噪声进行抑制,然后获取干涉相位图中的残差点分布,并经过形态学处理消除虚假像素,进行连通性滤波,即可提取出完整阴影区域。

图2 阴影区域提取方法流程图
1)干涉相位滤波
通过分析干涉相位残差点的形成机理,可以看出相位噪声的污染也会导致残差点的出现,而且通过实际数据的处理结果同样证明了这一点,因此需要对干涉相位进行滤波,以消除相位噪声对提取结果的影响。采用Sigma滤波,既可以保持干涉相位的纹理信息,也可以明显减弱干涉相位图的噪声。
2)残差点提取
按照下列残差点计算公式,提取残差点:

图3为缠绕干涉相位相邻的4个干涉相位值示意图。上面式中,φi,j代表干涉相位图中(i,j)像素处的缠绕干涉相位值,W代表相位缠绕算子,如果R>0,则为正残差点,R<0,则为负残差点,R=0,则为正常点。

图3 残差点示意图
3)形态学处理
若直接利用上述步骤中获得的残差点分布数据进行区域分割只能分割出单个像素,而无法分割出完整的密集残差点区域,并且区域外部还有可能存在一些未被滤除干净的斑点噪声,因此需要对上述步骤的结果进行形态学处理以提高阴影区域分割的完整性和准确性。
广泛应用的形态学基本运算包括腐蚀、膨胀、开运算、闭运算等,本方法中主要运用开运算和闭运算对提取结果进行处理,能够起到去除斑点噪声、填充部分空洞的作用。
开运算是对二值图像中的对象利用同一个结构元素先进行膨胀运算再进行腐蚀运算的算子。它的效果是剔除不能包含结构元素的对象区域,平滑对象的轮廓,断开狭窄的连接,去掉细小的突出。
闭运算是对二值图像中的对象利用同一个结构元素先进行腐蚀运算再进行膨胀运算的算子。它的效果是平滑对象边缘,填充对象内部的小空洞。
3 实验数据验证与分析
实验采用中科院电子所研制的Ku波段FMCW InSAR系统2015年11月在中国山西某地开展飞行实验获取的数据,本次实验载机的相对飞行高度为1 500 m,中心下视角为45°。图4为FMCW InSAR系统获取并经过处理得到的一幅影像图和干涉相位,图4(a)为InSAR影像单视图像幅度图,图4(b)为InSAR单视干涉相位。

图4 FMCW InSAR系统获取并经过处理的结果
经过Sigma滤波处理后,得到的干涉相位图如图5(a)所示,可以看出,干涉相位噪声得到了一定程度上的抑制。接下来对经过Sigma滤波处理的干涉相位进行残差点提取,图5(b)为干涉相位残差点分布提取结果。从残差点分布图可以看出,残差点在阴影区域的分布是比较密集的,同时在正常区域也存在一些孤立、稀疏的残差点,因此需要通过形态学变换作进一步处理。

图5 干涉相位残差点分布
经过形态学处理后的结果如图6(b)所示,可以看出孤立、稀疏的斑点噪声已经基本上被滤除,而且大区域中的小缝隙和小漏洞也已经被弥合,分割出了比较完整的阴影区域。
图6(a)为采用基于相干系数图检测方法提取的结果,图6(b)为采用本文所提方法处理的结果,可以看出本文方法比较完整地分割出了阴影区域,自动化程度优于基于相干系数图检测的方法。为了更清楚地证明这一结论,下面放大其中局部区域对两种方法的提取结果进行对比。
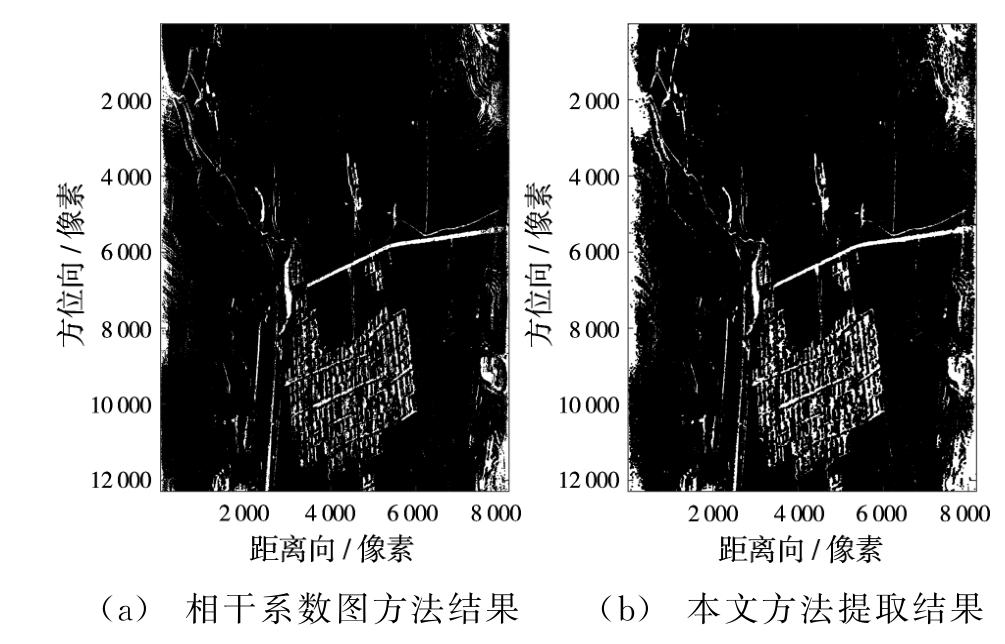
图6 阴影区域提取结果
阴影区域提取的局部结果图如图7所示。图7(a)为局部区域影像幅度图,图7(b)为采用基于相干系数图检测方法的提取结果,图7(c)为采用本文所提方法处理的结果,通过与对应区域的In-SAR影像幅度图进行对比,可以看出本文方法能较完整地检测出阴影区域。基于相干系数图方法的提取效果比较依赖于相干系数阈值的选取,然而在实际情况下,相干系数阈值需要人工选定,本文所提基于残差点分布的方法不需要确定阈值,解决了基于相干系数图检测方法阈值依赖的问题,适用性更佳。
4 结束语
FMCW InSAR系统由于侧视成像机制,载机平台轻小,飞行高度较低,在地形起伏区域更加容易出现阴影现象,严重影响DEM和DOM质量,传统基于相干系数图的方法依赖于阈值的选取。针对这一问题,本文提出了一种InSAR阴影区域提取方法,该方法利用干涉相位残差点分布提供的信息实现对阴影区域的提取,相比于传统的基于相干系数图检测方法,解决了阈值依赖的问题,实验数据的处理结果验证了本文所提方法的有效性。

图7 局部提取结果
参考文献:
[1]ROSSI C,EINEDER M,FRITZ T.Detecting Building Layovers in a SAR Interferometric Processor Without External References[C]∥10th European Conference on Synthetic Aperture Radar,Berlin,Germany:VDE,2014:1-4.
[2]SCANNAPIECO A F,RENGA A,MOCCIA A.Preliminary Study of a Millimeter Wave FMCW InSAR for UAS Indoor Navigation[J].Sensors,2015,15(2):2309-2335.
[3]WANG Yong,TANG Kai,ZHANG Ying,et al.A Ku-Band 260 mW FMCW Synthetic Aperture Radar TRX with 1.48 GHz BW in 65 nm CMOS for Micro-UAVs[C]∥IEEE International Solid-State Circuits Conference,San Francisco,CA:IEEE,2016:240-241.
[4]丁军,刘宏伟,王英华,等.一种联合阴影和目标区域图像的SAR目标识别方法[J].电子与信息学报,2015,37(3):594-600.
[5]任云,邹焕新,秦先祥,等.一种InSAR叠掩与阴影区域的检测方法[J].中南大学学报(自然科学版),2013,44(增刊2):396-400.
[6]索志勇,李真芳,吴建新,等.干涉SAR阴影提取及相位补偿方法[J].数据采集与处理,2009,24(3):264-269.
[7]王健,向茂生,李绍恩.一种基于InSAR相干系数的SAR阴影提取方法[J].武汉大学学报(信息科学版),2005,30(12):1063-1066.
[8]保铮,邢孟道,王彤.雷达成像技术[M].北京:电子工业出版社,2005:308-310.
