0 引言
机载前视雷达由于能够对正前方、侧前方的目标进行检测,因此在未来战场具有很强的应用前景。由于合成孔径雷达(SAR)[1-2]的特点,机载前视雷达只能在斜视的情况下进行成像,但当天线阵面处于前视时,由于天线阵面与航线垂直,所以接收天线之间没有沿航向基线。在这种情况下,传统的基于沿航迹基线的SAR地面动目标检测方法(GMTI)方法如DPCA[3],EDPCA,ISTAP[4],ATI[5]等方法将不能实现对杂波的抑制。并且由于在天线阵面前视放置下,地杂波的多普勒频率与空间锥角不再像正侧面阵那样呈现线性关系,从而给地面动目标的精确测速定位带来了困难。
在SAR模式下进行短脉冲STAP处理能够在较少的脉冲数目下获得地面运动目标的速度粗略估计,并且由于其不需要进行方位成像,所以需要的计算量很少,因此该技术具有很强的应用实际前景。本文提出了一种基于短脉冲STAP处理的机载前视阵雷达三通道SAR地面运动目标检测定位方法。该方法首先进行数据距离脉冲压缩之后,在方位合成孔径中心选取短脉冲串,进行两两STAP杂波抑制处理,由于全维STAP处理计算量巨大并且对样本需要量大,所以采用降维的STAP[6-7]方法来进行杂波抑制。由于实际中发射信号的频率通常采用X波段,因此在接收天线之间会存在严重的方位模糊,不能直接通过空域相位计算出运动目标的速度。所提出方法在对动目标进行速度检测时采用基于CAPON波束形成的方法来对动目标速度进行搜索,在获得动目标径向速度之后再对动目标进行重新定位。该方法不但能够获得正确的地面运动目标速度,并且能够对运动目标进行准确定位。仿真实验结果验证了本文方法的有效性。
1 信号模型
如图1所示,载机的天线阵面为前视阵,接收系统为三通道水平排布。X轴表示沿航迹方向,雷达载体平台速度为v,Y轴表示垂直航迹方向;发射为全孔径,相位中心在通道2位置,接收为通道1,2,3,D表示接收通道在Y方向的间隔;H代表平台高度;场景中心P点在tm=0时的坐标为(x0,y0,0),R0为对应中心斜距,θ0为P点对应的俯仰角,φ0为方位角。
图1 机载前视阵3通道水平排布天线工作示意
若存在运动目标,定义沿航迹速度为vx,垂直航迹速度为vy。在该几何结构下,地面运动目标与3根天线的瞬时斜距分别为
若雷达发射信号为线性调频(LFM)信号,则发射信号的基带复包络为
式中, 为距离快时间,γ为发射线性调频信号的调频率,gr(·)为雷达LFM信号的窗函数,在未加权时表示矩形窗。则3根天线接收的基带回波信号为
为距离快时间,γ为发射线性调频信号的调频率,gr(·)为雷达LFM信号的窗函数,在未加权时表示矩形窗。则3根天线接收的基带回波信号为
式中,τ1,τ2,τ3分别为3根接收天线所对应的时延,![]() 为距离脉压窗函数,ga(tm)为方位窗函数,σ为目标的后向散射强度,fc为雷达载频。由于τ1,τ2,τ3的差异很小,所以通常近似认为
为距离脉压窗函数,ga(tm)为方位窗函数,σ为目标的后向散射强度,fc为雷达载频。由于τ1,τ2,τ3的差异很小,所以通常近似认为

对3个接收通道接收到的基带回波信号经距离向脉冲压缩后,进行方位向的傅里叶变换可得三路数据为
式中,cosψs0为动目标对应的空间锥角。在前视阵面下对于多普勒频率为fd的地面杂波信号,其对应的空域锥角由下式求出:
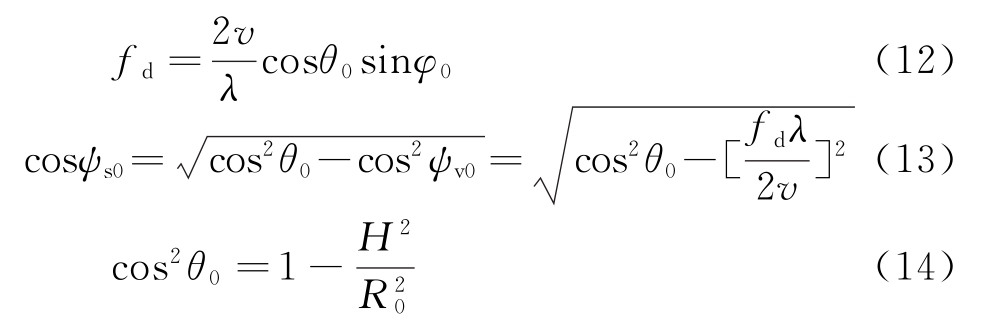
从式(9)~式(11)中能够明显地看出,对于3根接收天线而言,对应多普勒频率为fd的杂波空域导向矢量为
若地面存在运动目标,当动目标与地杂波的多普勒频率之和为fd时,则对应运动目标信号的真实位置多普勒频率为![]() ,因此动目标的空域导向矢量为
,因此动目标的空域导向矢量为
从式(15)和式(16)可以看出,在对距离脉冲压缩之后数据进行方位傅里叶变换之后,不同多普勒通道对应的杂波与运动目标在空域导向矢量上是不同的。因此,能够将某一多普勒通道的3根天线接收的数据写成:
式中,n为接收噪声。
2 前视三通道短脉冲动目标检测定位方法
SAR模式下的短脉冲处理即在距离压缩完成后只取较少的方位脉冲,利用STAP技术进行杂波抑制处理以及动目标检测。这种模式的优点是能够在不进行方位压缩成像的前提下快速地实现对运动目标的检测。但是,由于脉冲数目选取较少,所以对动目标速度的检测精度不高。本文方法采用与ATI方法近似的动目标检测流程。首先主要依靠空时自适应处理来进行地杂波的抑制,由于全维STAP计算量巨大,并且对IID样本数目有严格的要求,所以通常采用降维的方法,本文采用多普勒处理后联合局域多普勒通道进行自适应杂波相消(3DT)。3DT-STAP的主要思想是:在对接收通道进行时域多普勒滤波之后,若取第k(k=1,2,…,K)个通道作为检测通道,则取其左右相邻的两个通道作为辅助通道,然后作空时域的联合自适应处理。
由于需要对动目标的速度进行测定,因此最终需要两根天线的数据。因此,采用两两通道进行杂波相消的方法,具体过程如图2所示。
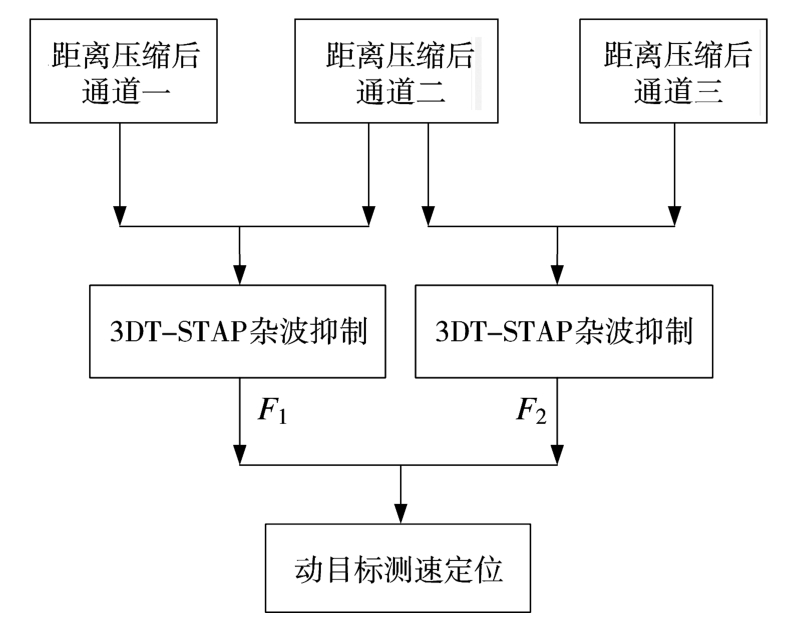
图2 三通道地面运动目标检测与定位流程
由于动目标具有一定的速度,所以在进行距离脉压之后,动目标会存在一定的距离扩展与方位散焦。在经过上面的3DT-STAP方法进行杂波抑制之后,检测获得的动目标信号不是一个单像素点,而是一簇像素点。由于这些散开的像素点均包含有运动目标的信息,因此能够以这些点来为样本采用最优波束形成(CAPON)方法来获得对动目标径向速度的精确估计。若进行杂波相消之后的两幅图像分别是F1和F2,检测出的运动目标在两幅图像中的动目标信号分别为
则动目标信号的自相关矩阵R通过下式来进行估计:
在估计出动目标的多普勒中心后,根据已知的距离门对应的俯仰角与天线孔径信息,可以求出动目标速度的搜索导向矢量为

式中,vri为动目标径向速度搜索矢量,暂不考虑距离模糊,因此搜索范围为
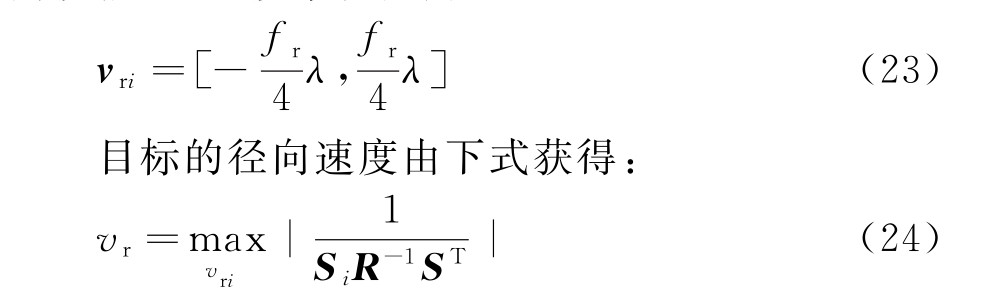
在获得动目标的速度估计之后便能够根据式(9)~式(11)中的sinc函数的偏移量关系来完成对动目标的重新定位。
3 仿真实验结果
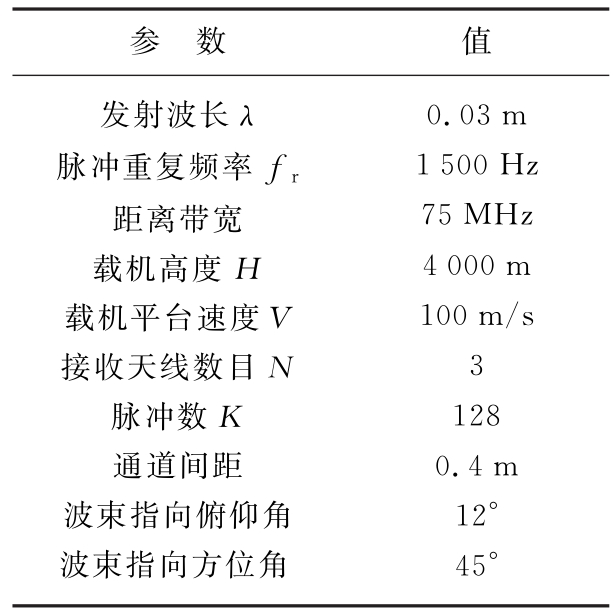
采用计算机仿真来对本文方法进行验证,仿真参数如表1所示。
表1 仿真实验参数
首先对3根天线的接收数据进行距离压缩,然后取各个接收通道合成孔径中间的128脉冲与64脉冲,利用本文的短脉冲处理方法进行动目标检测与定位。对于两组短脉冲数据,分别进行方位多普勒滤波之后的DBS图像如图3所示。
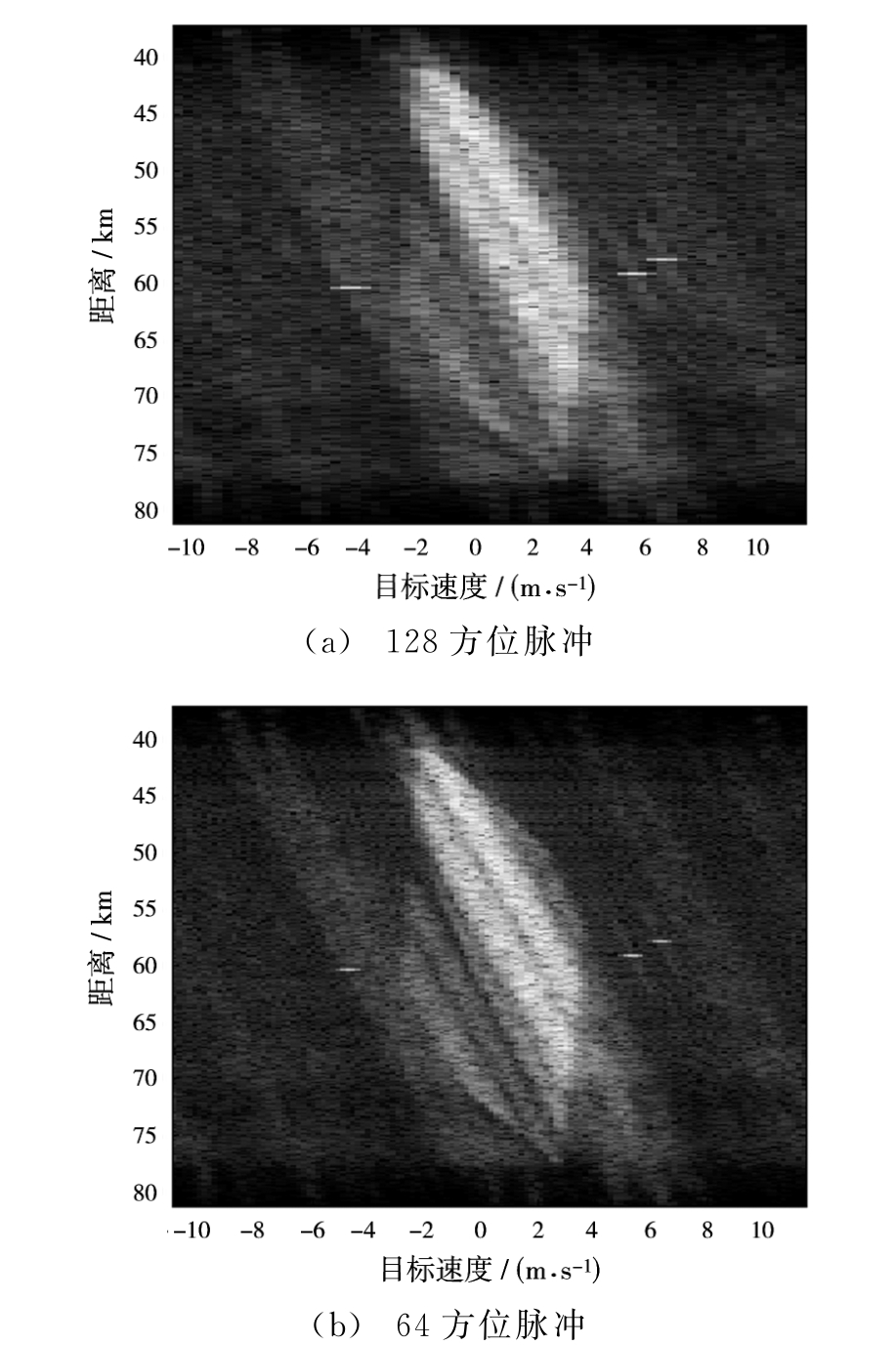
图3 杂波抑制前的DBS图像
从图3可以看出,存在严重的强杂波带。由于是前视阵雷达,所以对应的主杂波多普勒频率随着距离的变化存在一定的偏移。由于是进行短脉冲处理,所以在多普勒上分辨率很低。在两两通道之间进行3DT降维STAP杂波抑制之后如图4所示。
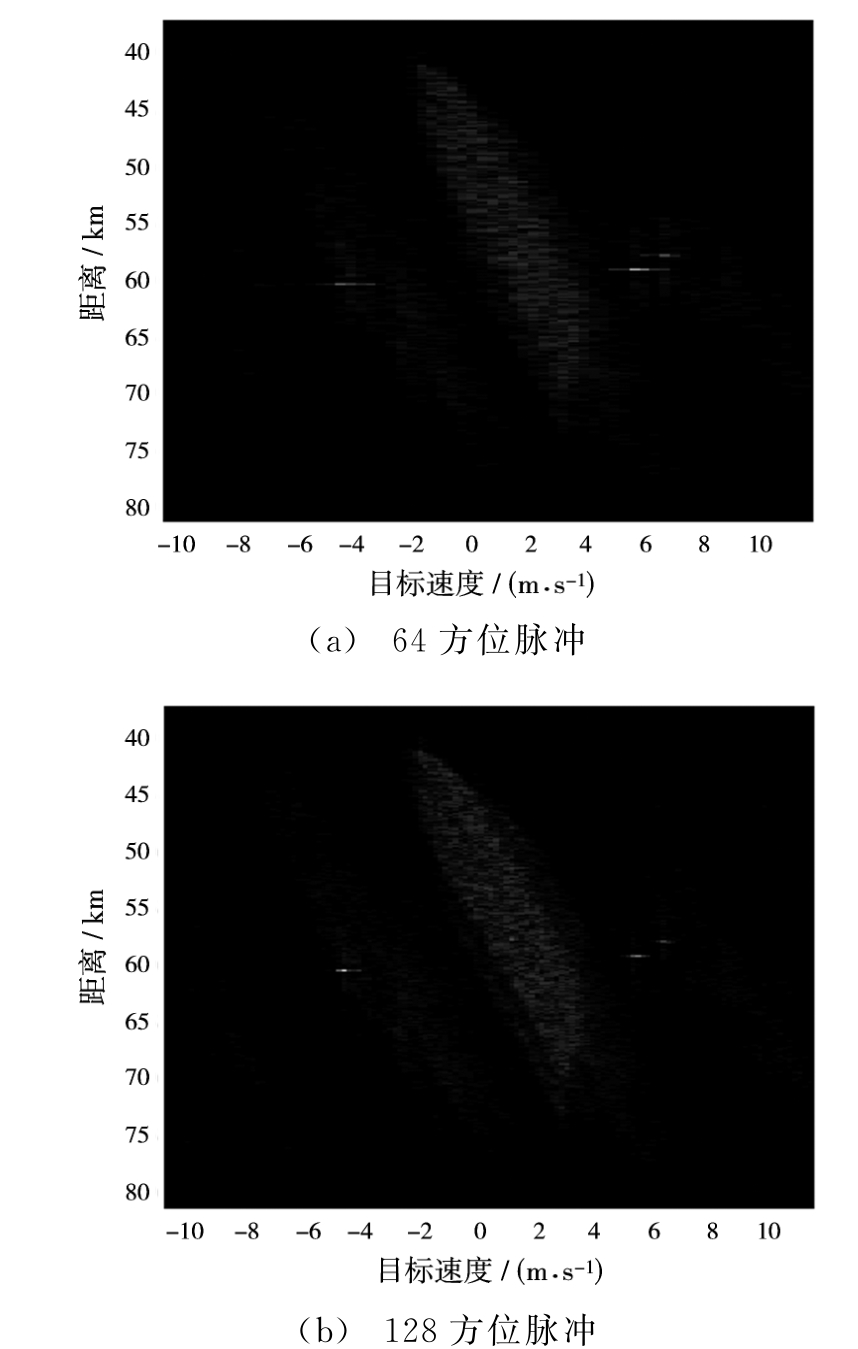
图4 对消杂波后的DBS图像
从图4的杂波抑制结果中能够发现,经过3DT-STAP杂波抑制之后,主杂波明显地减弱。从而能够顺利地将地面运动目标检测出来。画出在64脉冲数目与128脉冲数目下的动目标改善因子如图5所示。
从图5可以看出,由于脉冲数目选取少,导致杂波的多普勒分辨减弱,增大杂波秩,导致动目标的改善因子下降。由于3DT的计算量是与脉冲数目成正比例的,因此增大计算量与改善因子的损失要综合考量。由于目标速度不会位于多普勒滤波器的中心,另外考虑在距离脉压时会加窗函数进行处理,因而在图4中的动目标实际上是一些距离-多普勒散布的点,这些点均包含有动目标的信息,所以能够以这些点作为样本来进行动目标的径向速度估计。采用波束形成的方法进行动目标的速度估计结果如表2、表3所示。
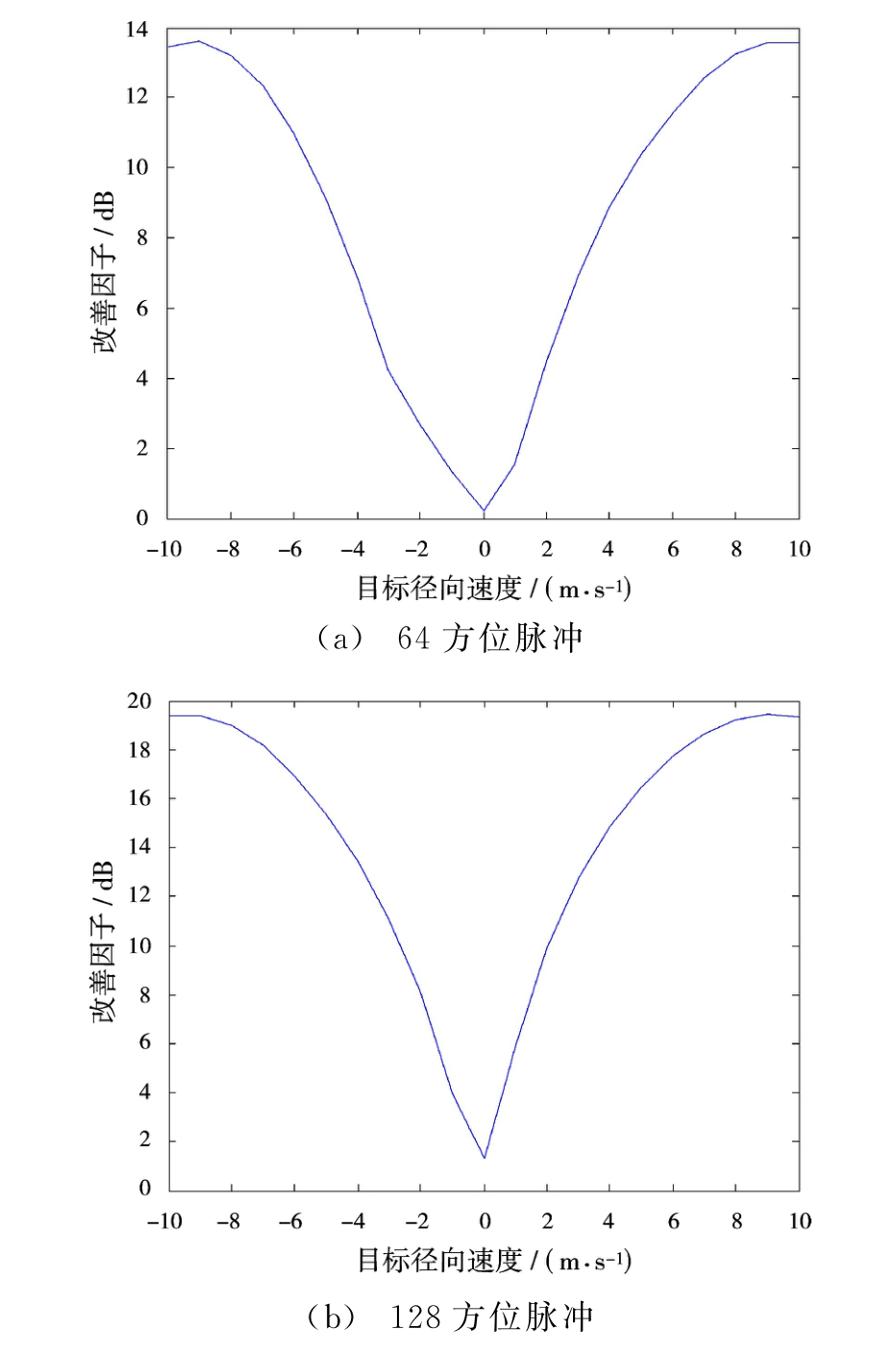
图5 动目标改善因子
表2 动目标径向速度估计结果(64脉冲)
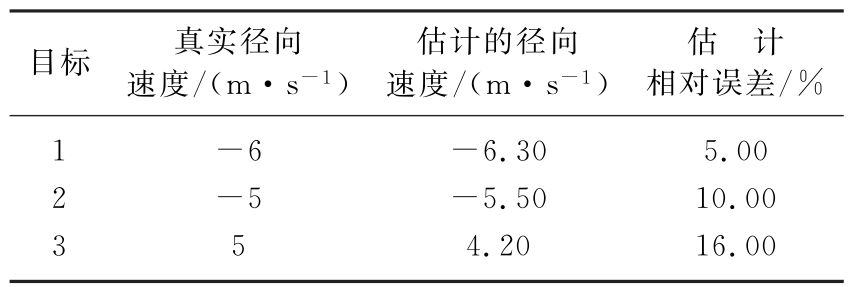
表3 动目标径向速度估计结果(128脉冲)
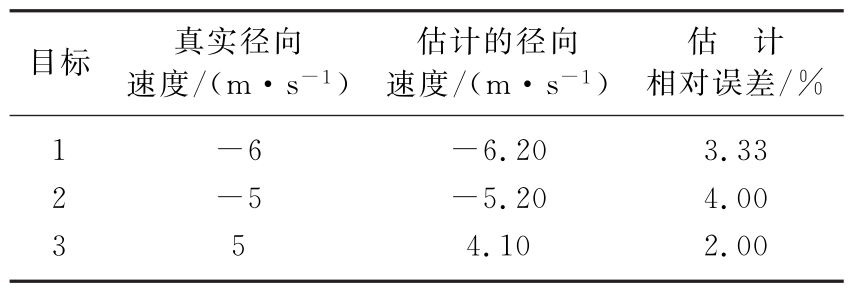
从表2和表3可以看出,脉冲数取64的估计结果要差于脉冲数取128,主要是因为脉冲数的多少决定后续多普勒频率分辨率的高低,脉冲数越多,多普勒分辨率越高,测速精度越高。但是,随着脉冲数目的增加,势必给计算量带来增加,特别是在空时自适应处理方面,计算量与脉冲数目的三次方成正比。而短脉冲模式的优点是计算量小,处理速度快,但测速精度会低,因此在快速脉冲数目的选取上要综合考虑测速精度需要以及系统计算能力。
4 结束语
机载前视雷达由于能够对正前方、侧前方的目标进行检测,因此在未来战场具有很强的应用前景。本文针对机载前视阵雷达SAR模式进行短脉冲STAP处理,首先给出了前视斜视下信号模型,由于阵面处于前视的情况下动目标的速度锥角与天线阵面之间的锥角不再一致,并且没有沿航迹基必须采用新的处理方法。针对该问题提出了先进行3DT-STAP处理,然后采用CAPON波束形成的方法进行动目标检测与测速定位。仿真实验验证了本文方法的有效性。
参考文献:
[1]李俊慧,王洪,汪学刚,等.步进频、脉冲和连续波SAR的对比研究[J].雷达科学与技术,2016,14(3):45-53.
[2]夏际金,崔留争.一种多核DSP的距离多普勒成像设计[J].雷达科学与技术,2016,14(2):169-172.
[3]WANG H S C.Mainlobe Clutter Cancellation by DPCA for Space-Based Radars[C]∥IEEE Aerospace Applications Conference Digest,Crested Butte,CO,USA:IEEE,1991:1-128.
[4]CERUTTI-MAORI D,SIKANETA I.Optimum GMTI Processing for Space-Based SAR/GMTI Systems:Theoretical Derivation[C]∥8th European Conference on Synthetic Aperture Radar,Aachen,Germany:VDE,2010:1-4.
[5]LOMBARDINI F,BORDONI F,GINI F,et al.Multibaseline ATI-SAR for Robust Ocean Surface Velocity Estimation[J].IEEE Trans on Aerospace and Electronic Systems,2004,40(2):417-433.
[6]于永,雷志勇.基于STAP杂波抑制的子阵优化技术[J].现代雷达,2016,38(9):28-31.
[7]陈功,谢文冲,王永良.基于空时联合约束的机载雷达STAP单脉冲角度估计方法[J].电子学报,2015,43(3):489-495.
