0 引言
场面监视雷达[1](SMR)是一种监控机场地面上飞机和各种车辆运动情况的高分辨雷达,是机场实施低能见度运行的基本条件。场面监视雷达一般安装于机场塔台,监视近地范围内的目标,具有较高的实时目标探测能力,能够可靠、精确地探测到机场附近的飞机和机动车辆移动情况,具有高分辨率、高数据刷新率等优点。场面监视雷达能够有力支援站坪指挥中心的管制功能,保证该管制中心的工作能够不受盲区、天气变化的影响,减少场面冲突,提高机场的安全系数,确保站坪内飞机、车辆交通的畅通、高效,提高机位、滑行道的利用率,降低营运成本。
对于场面监视雷达而言,除特定待观测目标外,地面固定建筑物及其他固定反射物均为杂波。为了减小甚至消除这类特殊杂波对目标正常检测的影响,需要进行杂波抑制处理,而杂波抑制需要先获取机场周围地物环境的二维轮廓杂波图。
文献[1]对场面监视雷达的技术发展进行了综述性介绍,文献[2]对机场场面监视雷达抗杂波性能进行了详细分析,文献[3-4]对基于雷达杂波图的典型CFAR算法进行了研究和探讨,文献[5]研究了一种针对机场场面监视雷达的区域约束目标跟踪方法,文献[6]研究了一种基于非相参积累的杂波图检测方法。本文以场面监视雷达杂波图应用技术为背景,研究了一种场面监视雷达二维轮廓杂波图形成方法及工程实现流程,并针对典型几种杂波图CFAR算法进行了对比分析。
1 杂波图原理及典型CFAR算法
1.1 杂波图原理
杂波图是表征雷达威力范围内按距离-方位单元分布的杂波强度图。杂波图按建立与更新杂波图的方式分为动态杂波图和静态杂波图[3]。动态杂波图是一种针对背景杂波动态变化而能够进行不断自动修正和更新的杂波图,静态杂波图的背景杂波已经固化而不能动态改变,但可在阵地转移后或根据其他实际情况进行重新建立。它适用于杂波背景变化不明显的应用场合。场面监视雷达应用即属于此种场合。二维杂波图构造如图1所示。
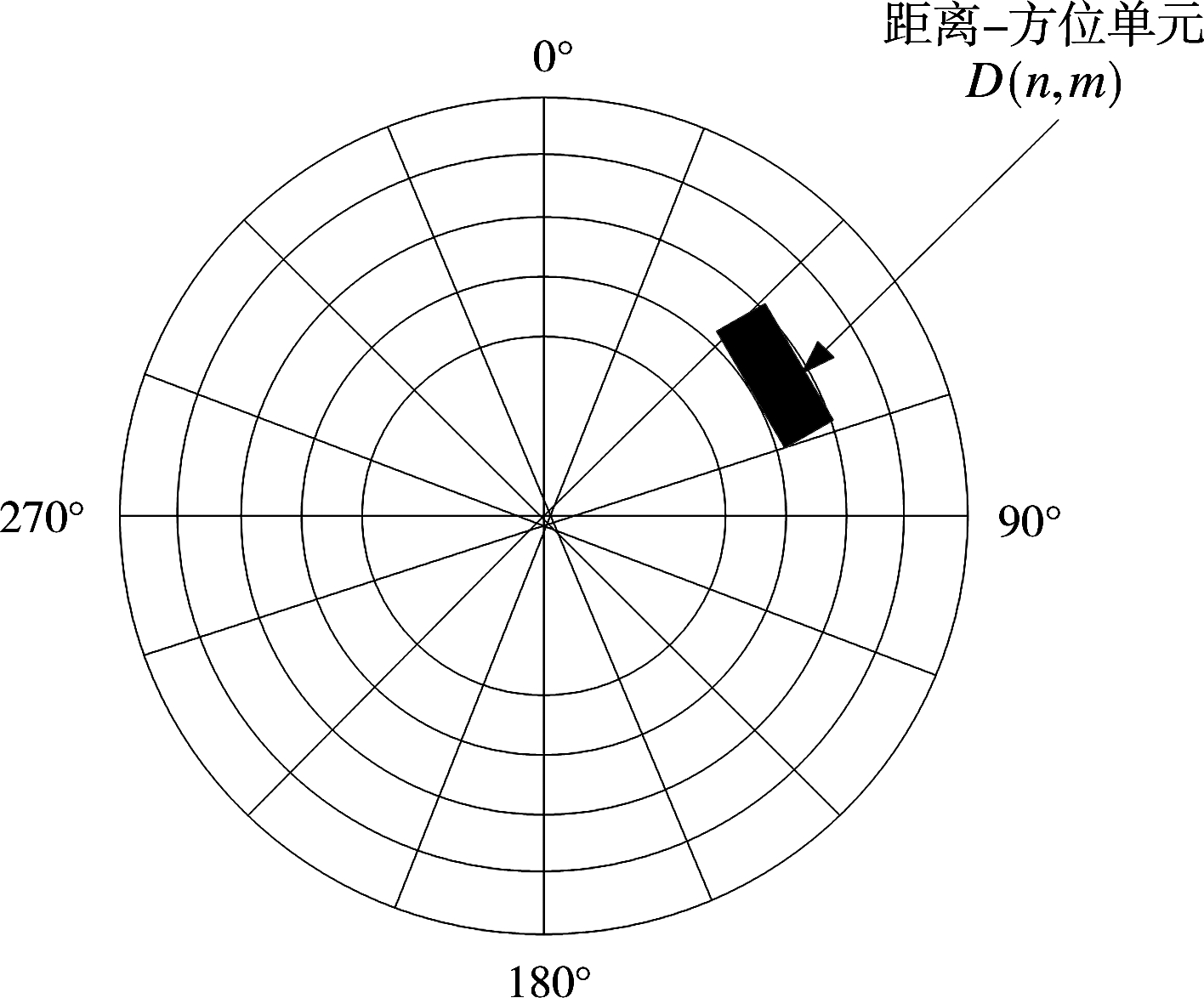
图1 杂波图距离-方位单元划分
假设雷达距离维上划分为N个距离单元(n=1,2,…,N),方位维上分块为M个方位单元(m=1,2,…,M),则杂波图共有NM个距离-方位单元,此处用(n,m)表示距离-方位单元的编号。对于静态杂波图而言,其每个杂波单元上的杂波数据应等于不同天线扫描周期积累后进行平均(不同扫描天线周期的AGC,STC因素要综合考虑)的结果。静态杂波图构造如下式所示:
式中,l为天线扫描周期数,Di(n,m)为第i个扫描周期形成单幅杂波图的第(n,m)单元的杂波功率,D(n,m)为多次统计平均的第(n,m)单元的杂波功率。
1.2 典型杂波图CFAR算法
对于场面监视雷达而言,由于地杂波实际上也是目标,因此考虑基于雷达目标检测原理,将目标检测方法应用于杂波单元检测。因此,构造典型的CA-CFAR,OS-CFAR及CMLD-CFAR等三种CFAR检测算法,如图2~图4所示。
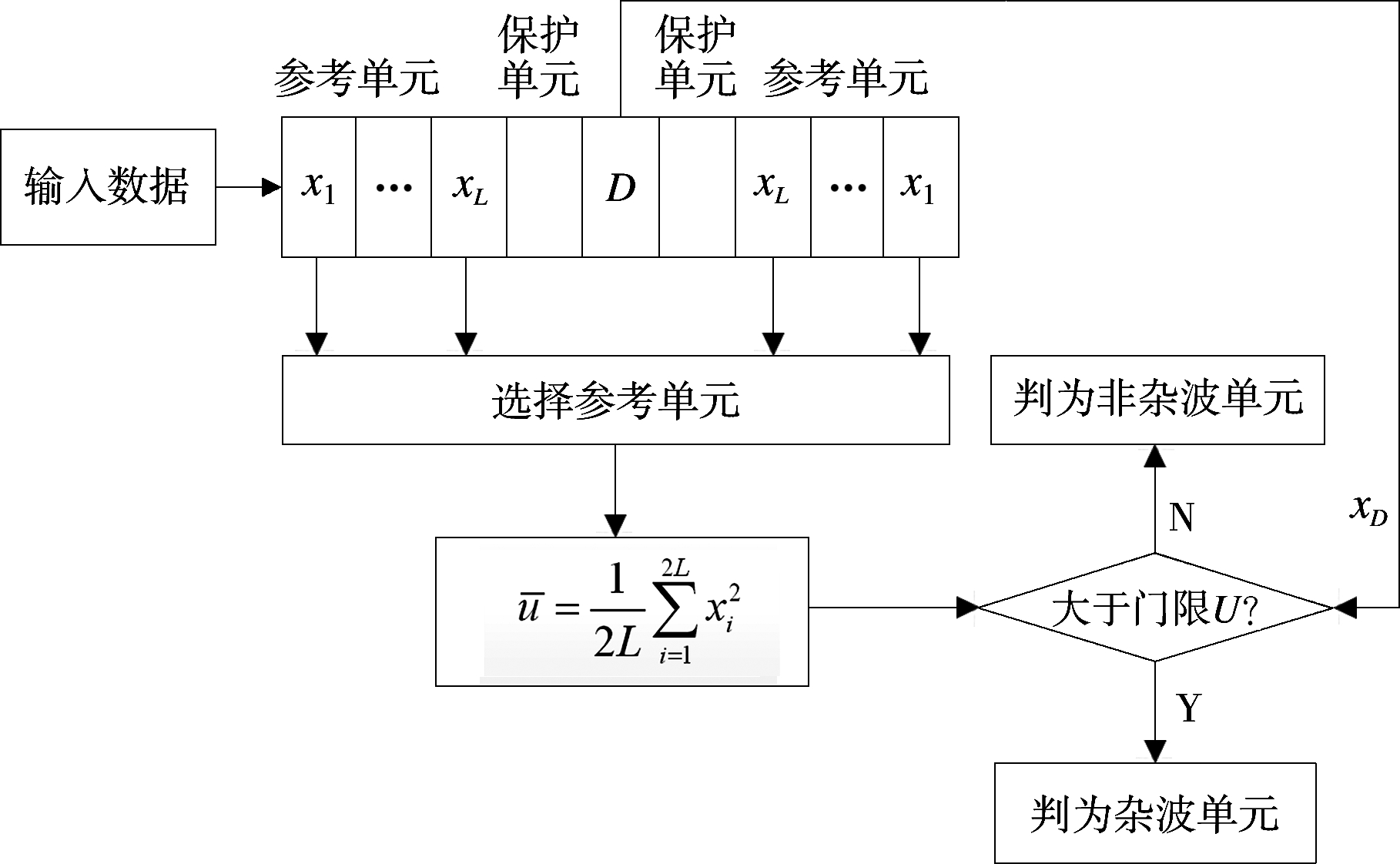
图2 CA-CFAR杂波检测原理框图
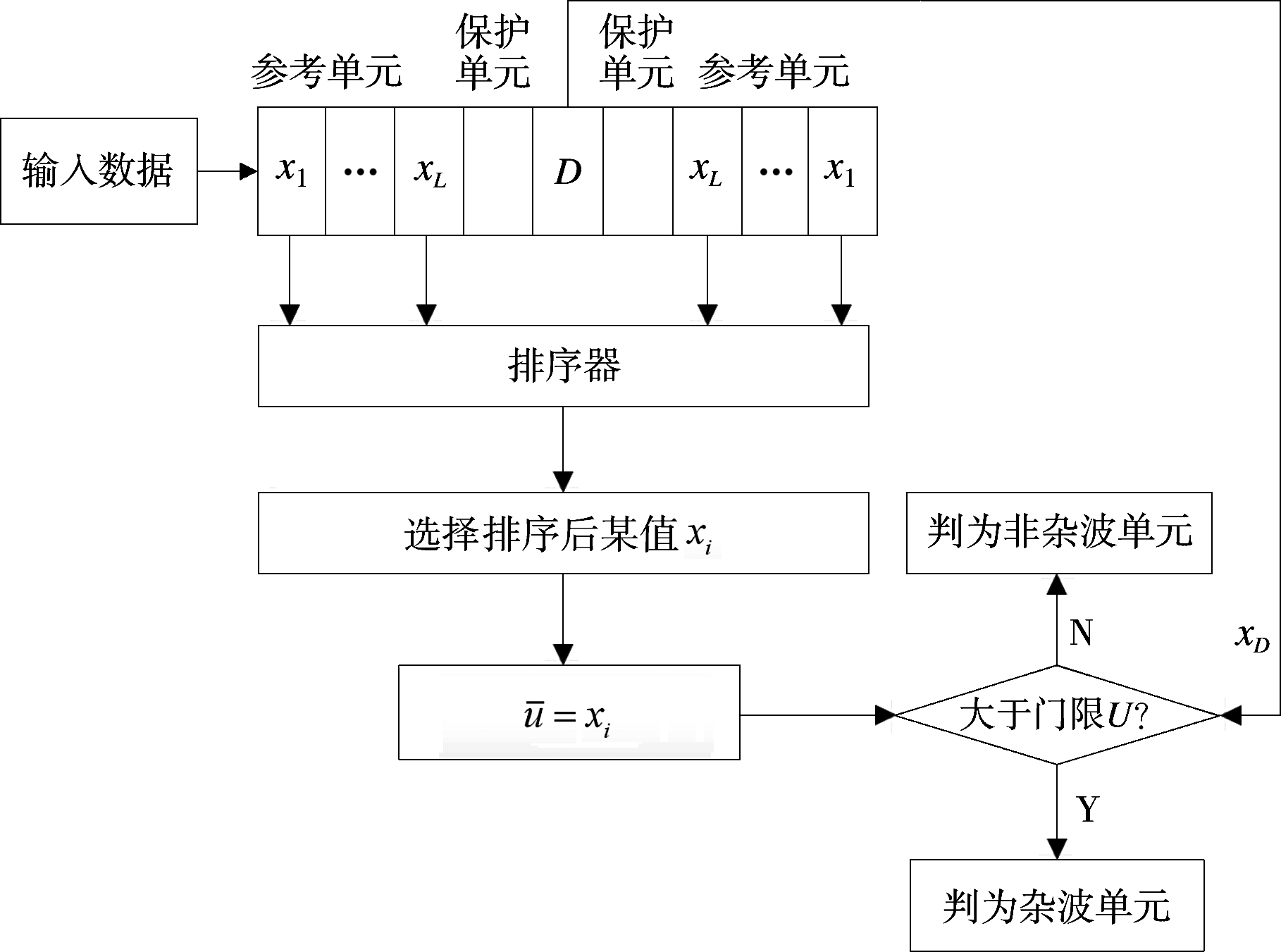
图3 OS-CFAR杂波检测原理框图

图4 CMLD-CFAR杂波检测原理框图
以上3种CFAR算法的区别在于平均功率¯u的计算方法不同,CA-CFAR针对所有的参考单元进行平均;OS-CFAR针对排序后的参考单元选取其中某个值;CMLD-CFAR则针对经排序后去除r个较大值然后进行线性组合,本文中取线性组合系数均为1。将上述平均功率¯u乘上一判决门限系数K后得到的绝对门限值U与待检测单元功率进行比较,若大于1则判为杂波单元(置1),反之则判为无杂波单元(置0);其中K与检测概率、虚警率有关。另外需要说明的是,图中保护单元左右各取一个单元仅为示意,并不代表算法实现中左右各取一个单元。
通过上述CFAR检测后,可以形成一个带有杂波有无二分层信息的二维轮廓杂波图,雷达在信号处理过程中,仅针对无杂波(值为0)单元进行目标检测,从而在减轻信号处理负担的同时,实现对杂波的抑制。
2 系统信号处理及杂波图算法实现流程
2.1 系统信号处理流程
场面监视雷达系统信号处理流程如图5所示。
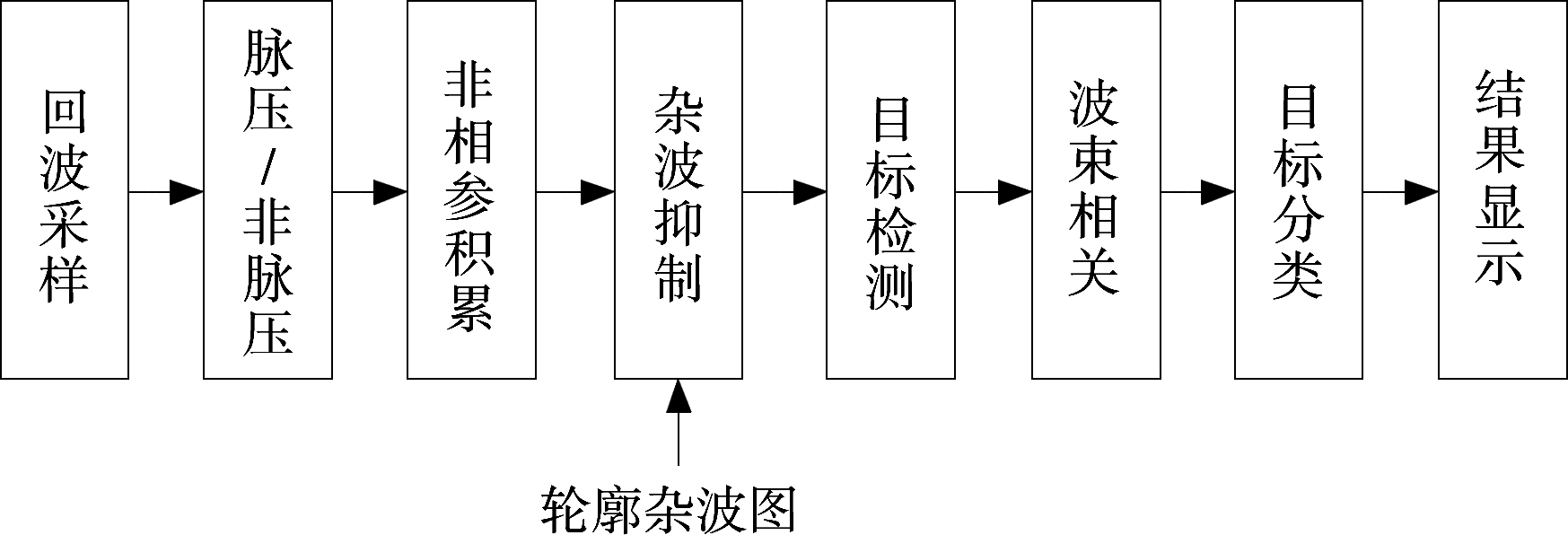
图5 系统信号处理流程图
本文所做的工作主要是产生杂波抑制所需要的二维轮廓杂波图。其输入为经过非相参积累后的一维数组。
2.2 杂波图形成工程化算法实现流程
杂波图生成的具体实现步骤如下:
步骤1 雷达获取一个扫描周期(天线旋转一周)的原始回波数据后,进行距离向脉压处理。
步骤2 对脉压处理后的数据进行双极点滤波,形成距离-方位二维数据矩阵。
步骤3 利用上述CFAR算法,对二维数据矩阵中的每个距离单元进行距离维杂波检测,判为杂波单元置1,非杂波单元置0,形成距离-方位二维“0/1”矩阵,即为单幅二维轮廓杂波图。
步骤4 对上述二维轮廓杂波图在方位上进行“杂波区”扩展。扩展方式为对方位进行重新分块,将重新分块后划入同一区域的各单元作“或”处理,如图6所示。形成扩展后二维轮廓杂波图。
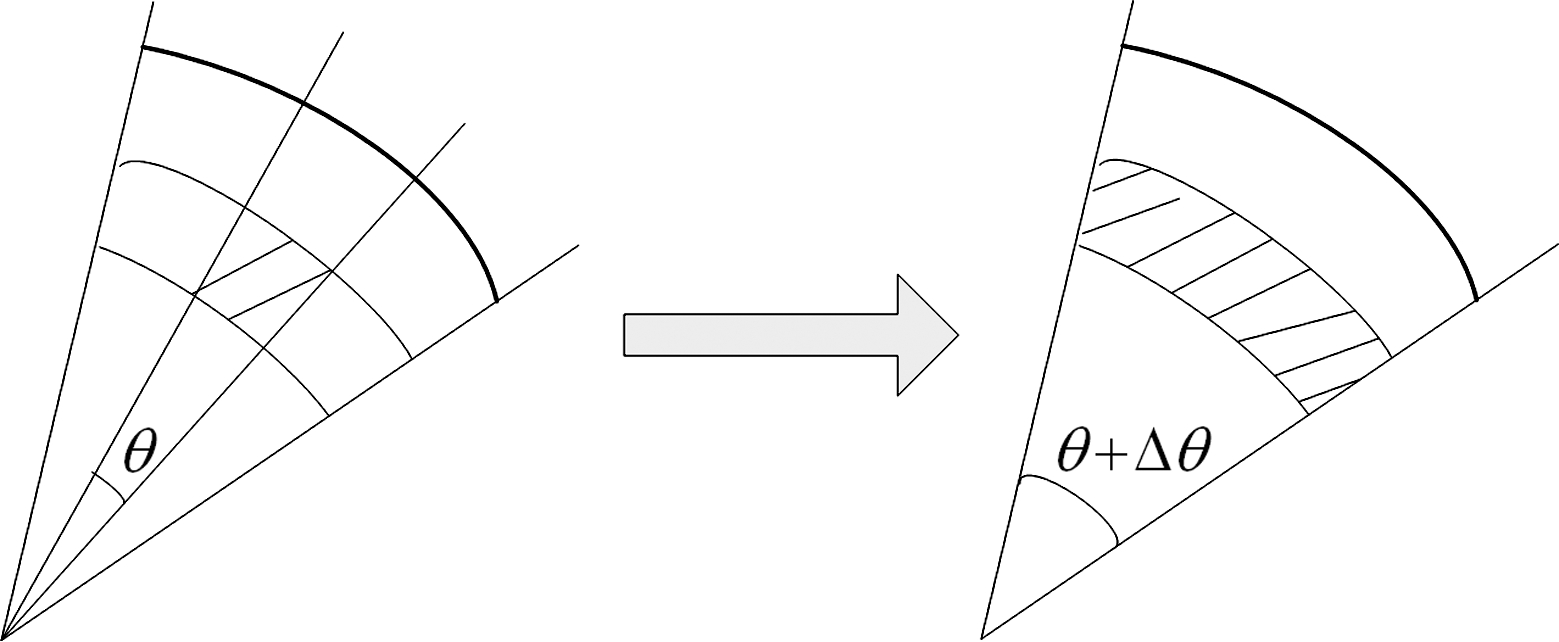
图6 杂波图扩展示意图
步骤5 取雷达多个扫描周期(一般为10~20次),重复步骤1~步骤4。
步骤6 对形成多幅扩展后二维轮廓杂波图进行求和取平均,得到平均后二维轮廓杂波图。
步骤7 设定一杂波门限值(小于1),对平均后的二维轮廓杂波图各单元值与杂波门限值进行比较,超过门限值置1,否则置0,形成最终的二维轮廓杂波图。
2.3 杂波抑制算法实现流程
非相参处理后输入数据表示为
根据轮廓杂波图,对每一条经过非相参积累后的距离线数据,先根据帧号对应的方位角索引出所落入的角度区间(方位分块产生),然后根据此区间的杂波单元分布判断是否进行目标检测。杂波抑制流程如图7所示。
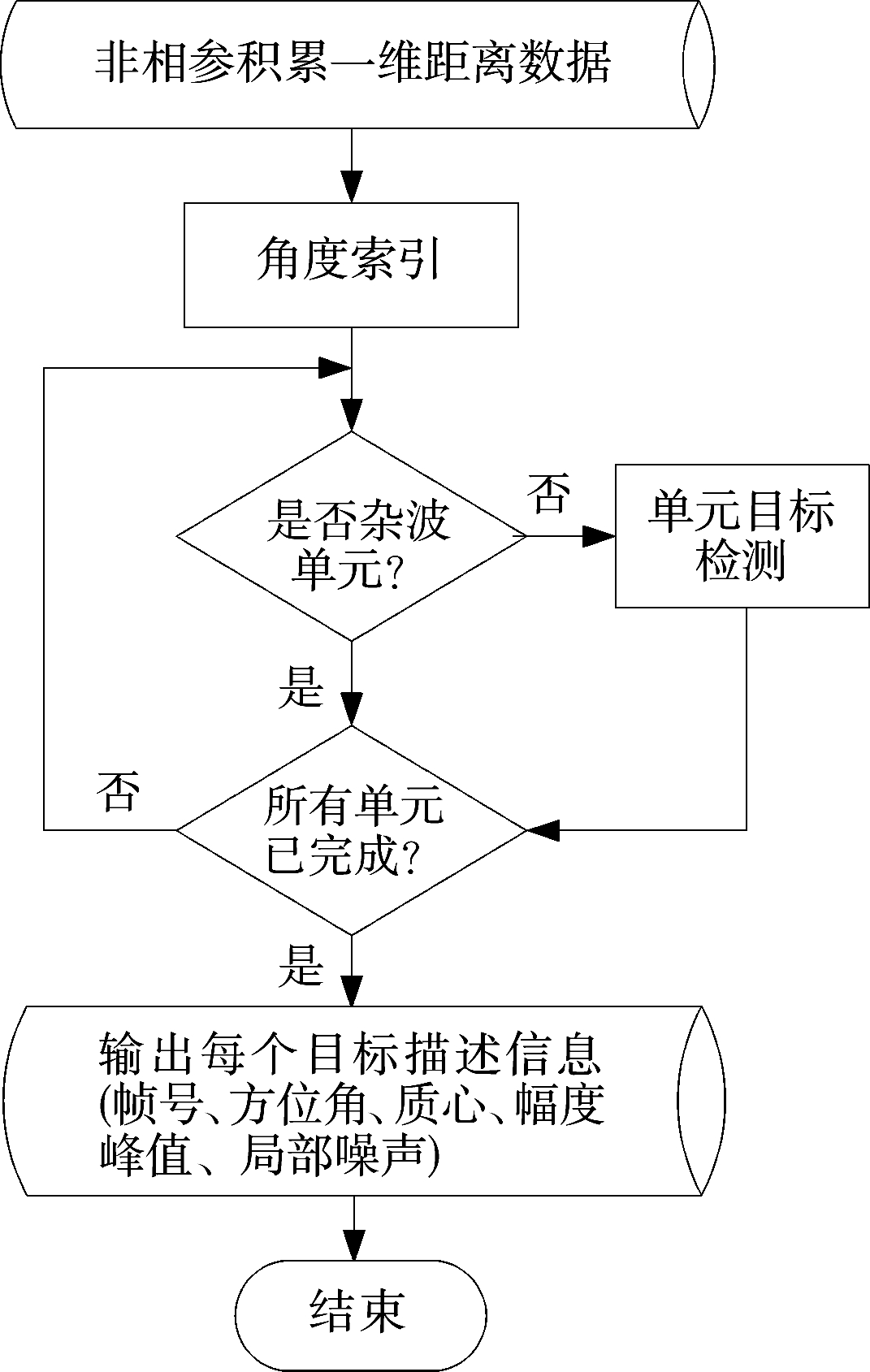
图7 杂波抑制流程图
3 实测数据处理结果与分析
试验雷达主要参数如下:作用距离6 km,距离分辨率6 m,方位角分辨率0.3°,发现概率90%(针对1 m2目标),虚警率不超过10-6。为保证形成杂波时在距离向、方位向均具有连续性,试验中以雷达试验场地附近的一条铁路作为研究对象,分别利用上述3种CFAR算法进行轮廓杂波图生成效果验证。
考虑到建筑物的尺寸一般较大,因此,保护窗和参考窗的选取根据建筑物等的尺寸进行核算,以提高生成杂波图的准确度。核算后参考单元L取20,保护单元左右各取10,剔除单元r取10,OS-CFAR算法中的xi取排序后的中值。另外,根据对试验场地回波数据的杂波幅度特性统计,获得其直方图分布,确定门限系数K为10。图8(a)采用CA-CFAR算法时,距离向存在明显的不连续,部分杂波边缘未能被检出;图8(c)采用OSCFAR算法时,形成的杂波图几乎覆盖了整个区域,这将会严重影响后续检测环节中目标的正常检出;图8(b)采用CMLD-CFAR算法后,具有比CA-CFAR算法更好的杂波边缘检测效果,而且也不至于像图8(c)那样将大片区域均判为杂波。
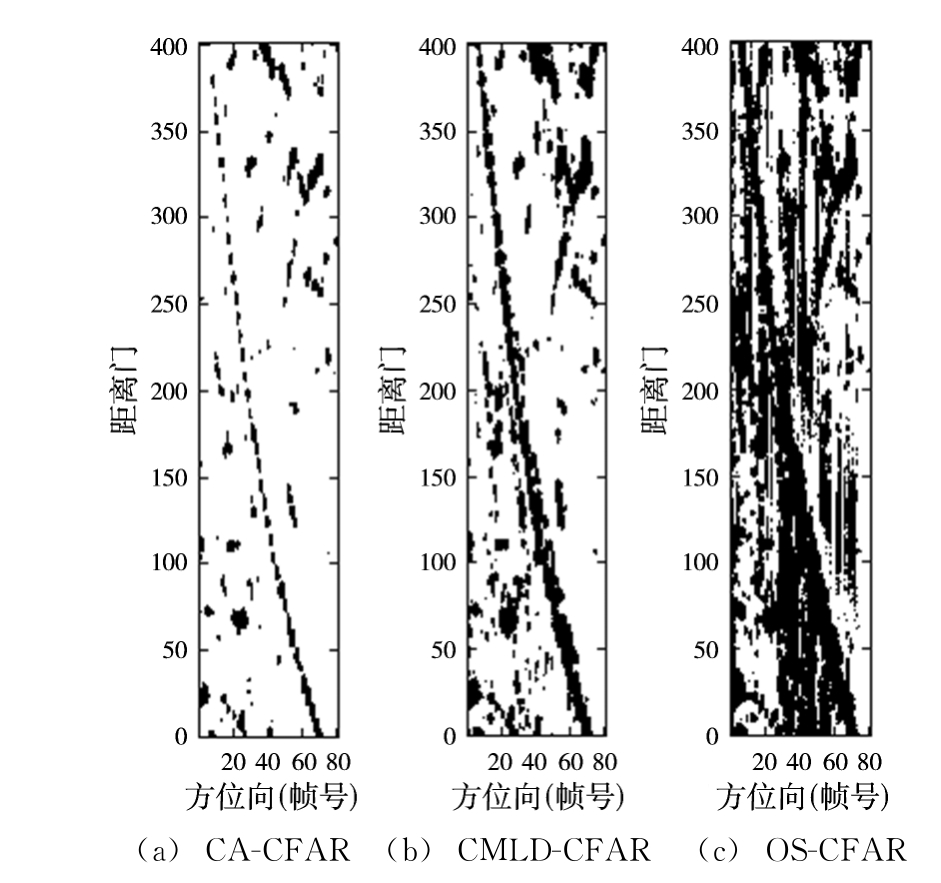
图8 不同CFAR算法杂波检测结果示例
采用基于CMLD-CFAR算法的轮廓杂波图在某场面监视雷达信号处理机中已经得到应用。在试验场地附近一条马路上停放了7辆汽车作为试验目标,图9给出了基于CMLD-CFAR算法处理后的二维轮廓杂波图结果,雷达位于图中的圆心位置,可以看到清晰的马路轮廓边缘。图10(a)、图10(b)分别示出了停放试验目标前后形成轮廓杂波图效果对比图,从图10(b)中可以清晰地看到停放在马路边的7辆汽车。

图9 基于CMLD-CFAR算法的二维轮廓杂波图结果示例
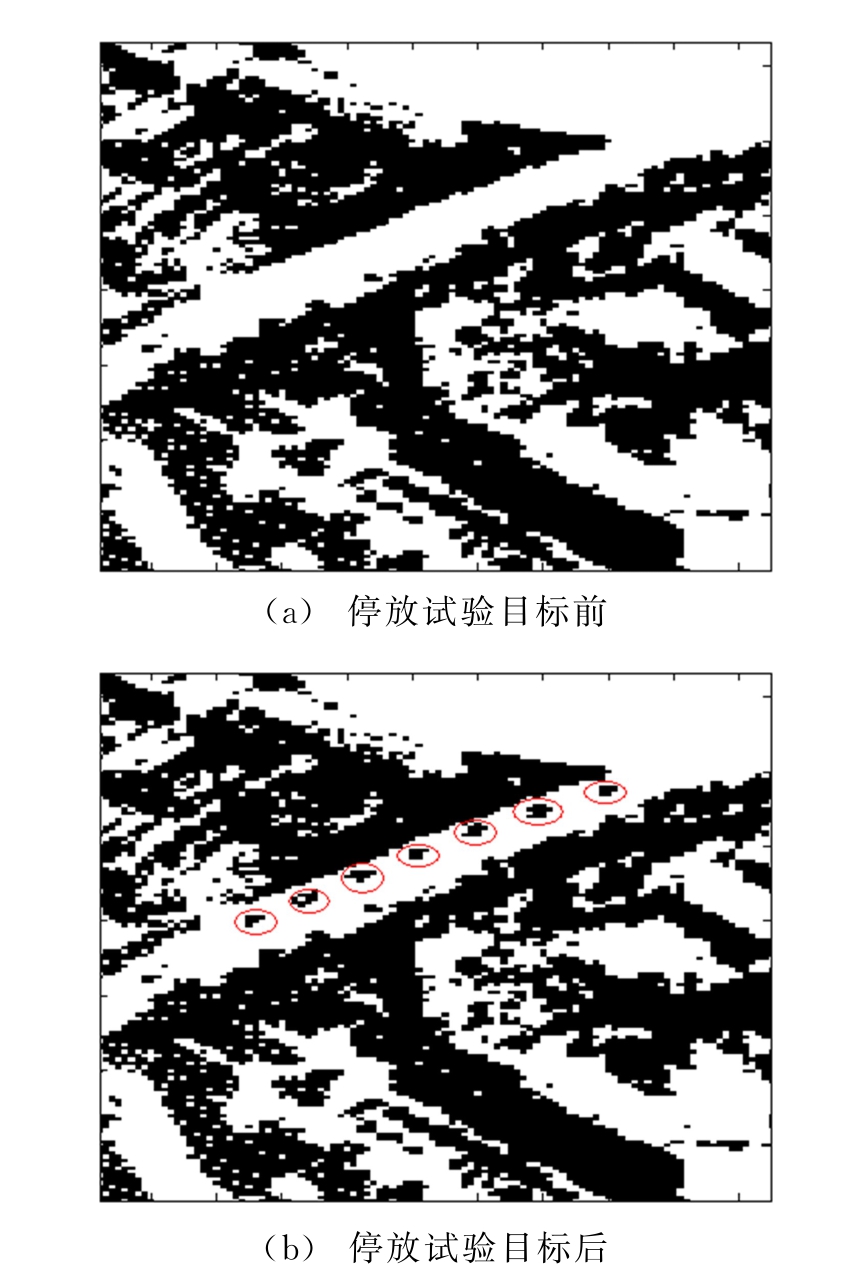
图10 停放试验目标前后形成轮廓杂波图(局部)对比
4 结束语
本文对3种典型的杂波图CFAR算法进行了分析比较,并给出了系统信号处理及轮廓杂波图形成算法实现流程,得出采用CMLD-CFAR算法可以获得更好的杂波边缘检测性能的同时又不至于将大量非杂波区判为杂波的结论,因此更有利于场面监视雷达工程化应用。
参考文献:
[1]李斌,张冠杰.场面监视雷达技术发展综述[J].火控雷达技术,2010,39(2):1-6.
[2]沈杰,晏勇.机场场面监视雷达反杂波性能分析[J].雷达科学与技术,2014,12(2):123-126.SHENG Jie,YAN Yong.Analysis of Clutter Suppression Capability in Surface Movement Radar[J].Radar Science and Technology,2014,12(2):123-126.(in Chinese)
[3]SHAN Tao,TAO Ran,WANG Yue,et al.Performance Analysis of Multidimensional Clutter Map CFAR[C]∥International Conference on Signal Processing,Beijing:IEEE,2004:2128-2131.
[4]王雪,雷卓,欧阳耀果.基于雷达杂波图的CFAR算法[J].火控雷达技术,2010,39(4):52-55.
[5]李川,靳俊峰,曲成华.基于区域约束的机场场面目标跟踪[J].雷达科学与技术,2015,13(6):564-566.LI Chuan,JIN Junfeng,QU Chenghua.Surface Movement Target Tracking Based on Region Constraint[J].Radar Science and Technology,2015,13(6):564-566.(in Chinese).
[6]安文,孟祥伟.一种改进的杂波图检测方法[J].武汉大学学报(信息科学版),2015,40(9):1176-1179.