0 引言
车载雷达广泛应用于汽车碰撞报警系统、主动避撞系统和自适应巡航系统等汽车主动安全技术中,对降低道路交通事故和提高汽车主动安全性发挥了重要作用。按测量介质不同,车载雷达可分为超声波雷达、红外雷达、激光雷达和微波雷达。超声波雷达和红外雷达因其探测距离相对较近,主要应用于倒车控制系统;激光雷达和微波雷达因其具有测量距离远、精度高等优点,已被广泛应用于汽车主动安全控制系统[1]。其中,微波雷达测量性能受天气等外界因素影响较小,是车载雷达的可靠选择之一。
车载微波雷达的研究始于20世纪60年代,典型代表是ASR100脉冲测距雷达,许多著名汽车公司都采用该款雷达。此后出现的MMW雷达采用调频连续波测距方式,是世界上第一款使用相控阵的车载雷达,使波束扫描更加灵活[1]。
车载雷达在搜索目标时,主要分为以下两种情况:其一,车辆在高速公路行驶的情况下,探测距离较远,约为150 m,方位向较窄,约为±10°;其二,车辆在城市公路上,启动、刹车、转弯或行驶中探测附近行人和车辆的情况下,作用距离较近,最远距离在50~60 m之间,方位角覆盖范围较大,约±60°。
现有车载雷达主要针对远距离、小角度范围搜索,采用线性调频连续波,根据其时延和多普勒频率,测量出目标的距离和速度,只有少数雷达测量目标的角度,而且在该种情况下,无法实现近距离、大角度的快速搜索,同时在测多目标时还存在角闪烁等问题。而针对近距离、大角度搜索,主要应用了DBF技术,以扩大波束覆盖范围,同时还可实现多目标检测和干扰抑制[2]。本文设计了一部车载相控阵雷达,该雷达具有远距离搜索和近距离搜索两种工作模式,并针对提高搜索速度,着重介绍了宽波束收发和DBF接收两种近距离、大角度快速搜索方案,为主动避撞系统提供信息保障。相比于目前流行的微波防撞雷达,本文的防撞雷达除同时兼顾远区和近区的探测外,还具有搜索速度快、近区覆盖范围广等优点。
1 系统介绍
该车载相控阵雷达采用线性调频连续波(LFMC),调制周期和调制频偏分别为3.5 ms,400 MHz。系统框图如图1所示,其天线在方位向上由32个阵元组成,每个阵元均通过一个T/R模块与收发阵列连接,之后进行信号处理。系统指标和天线参数分别如表1和表2所示。
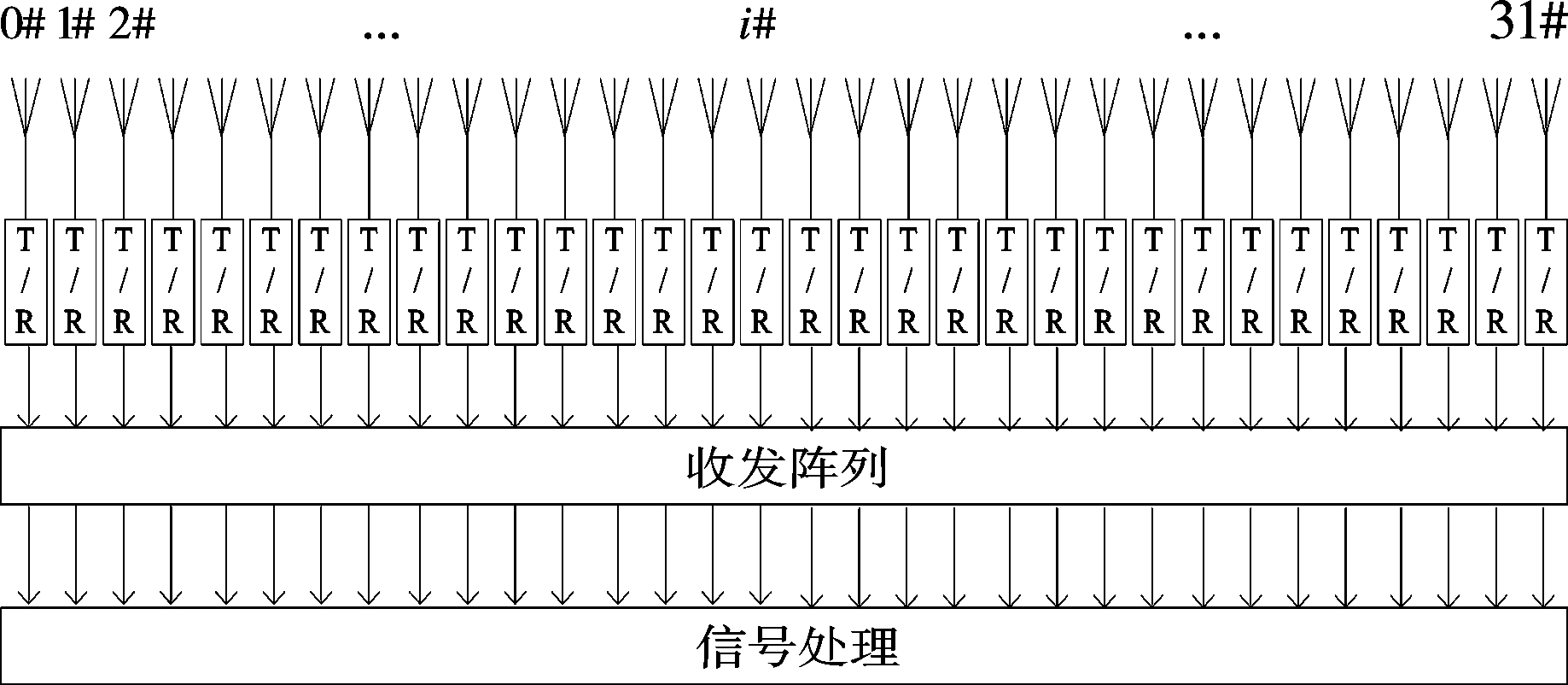
图1 系统框图
表1 系统指标
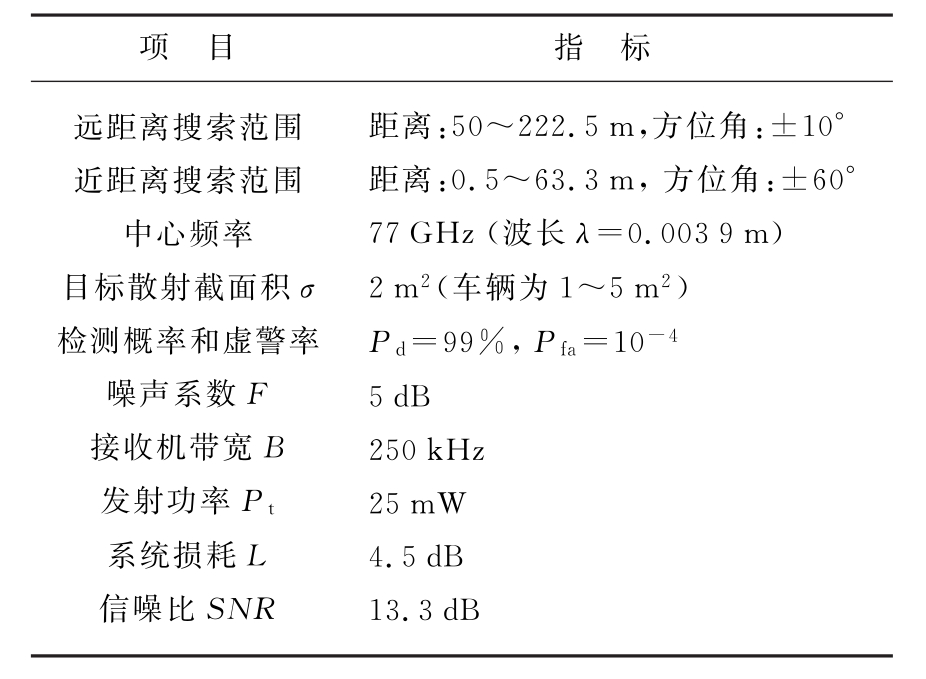
表2 天线参数
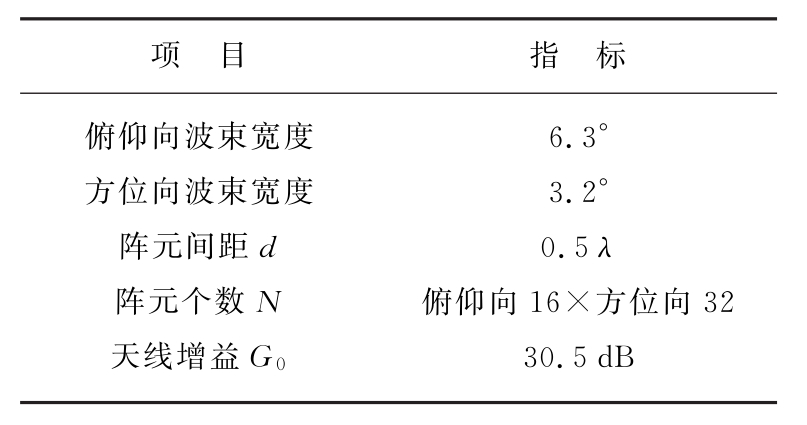
注:天线孔径效率ρ为0.7;本文所提波束宽度均为方位向上半功率波束宽度θ3dB;表格中波束宽度和天线增益均为0°波束指向时。
当远距离搜索时,使用全部阵元,此时波束宽度为3.2°,通过扫描完成±10°范围内的搜索,最远作用距离可达224 m;当近距离搜索时,需要覆盖更宽的搜索范围,为提高搜索速度,提出两种快速搜索方案。
2 大角度快速搜索方案
该系统中波束切换时间为2μs,波束驻留时间为3.5 ms。完成远距离搜索用时24.514 ms。若采用相同的方式完成近距离搜索,需要搜索时间为112.064 ms。因此,完成一帧搜索用时136.578 ms。通常车载雷达要求帧速率达到20 Hz,即在50 ms之内完成一帧的搜索。可见目前该系统无法达到要求,因此,针对近距离搜索提出如下两种快速搜索方案。
2.1 方案一:宽波束收发
由线性阵列的半功率波束宽度[3]:
可知,当波束扫描角度θB和阵元间距一定时,减少阵元个数时可以增加波束宽度,从而减少使用波束的个数,进而减少波束切换时间,达到缩短搜索时间的目的。
当单独采用一个宽波束探测目标时,只能检测波束覆盖范围内是否存在目标,如果存在目标,由于波束较宽,其角度测量误差较大,最大可达到波束宽度的一半。采用振幅和差测角来判断目标的方位,虽然不能提高角度分辨率,但是角度测量误差将大大降低。
振幅和差测角的基本原理[4]如图2所示。采用完全相同且彼此部分重叠的两个波束,如果目标处于波束重叠中心轴方向,则收到的两个波束信号为等强度信号,否则一个信号幅度将强于另一个,并且目标偏离波束中心轴越远则收到的幅度差越大。
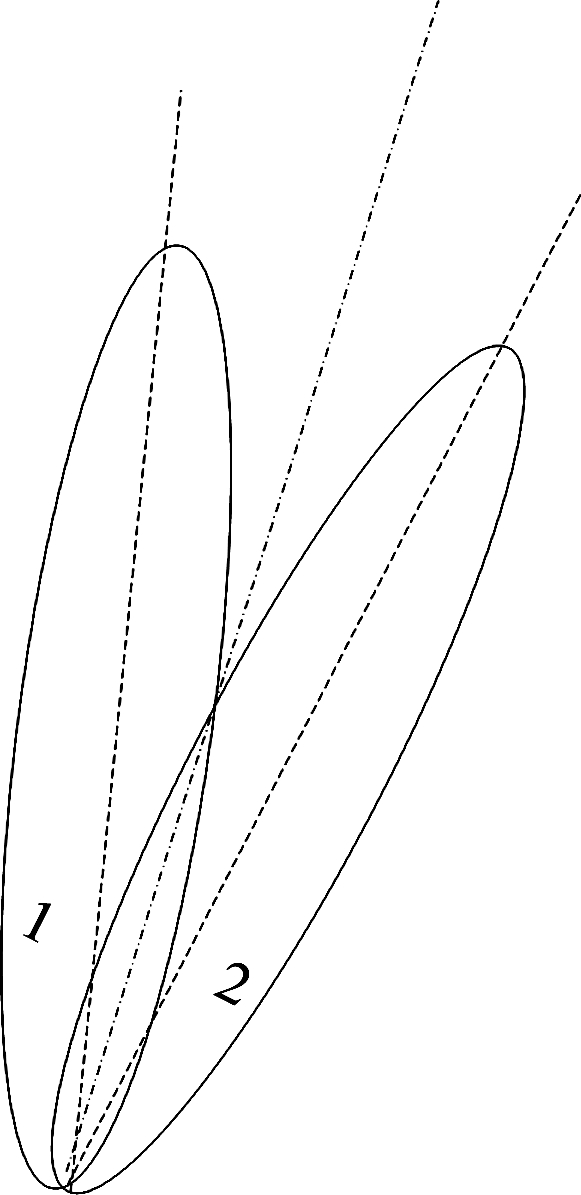
图2 振幅和差测角基本原理图
实现方法如图3所示。收发天线均为连续排列的4个阵元,在接收天线中,采用半阵法形成和、差波束,即每相邻两个阵元为一个通道,其中Σ完成两通道信号的相加,输出和波束信号;Δ完成两通道信号的相减,输出差波束信号。
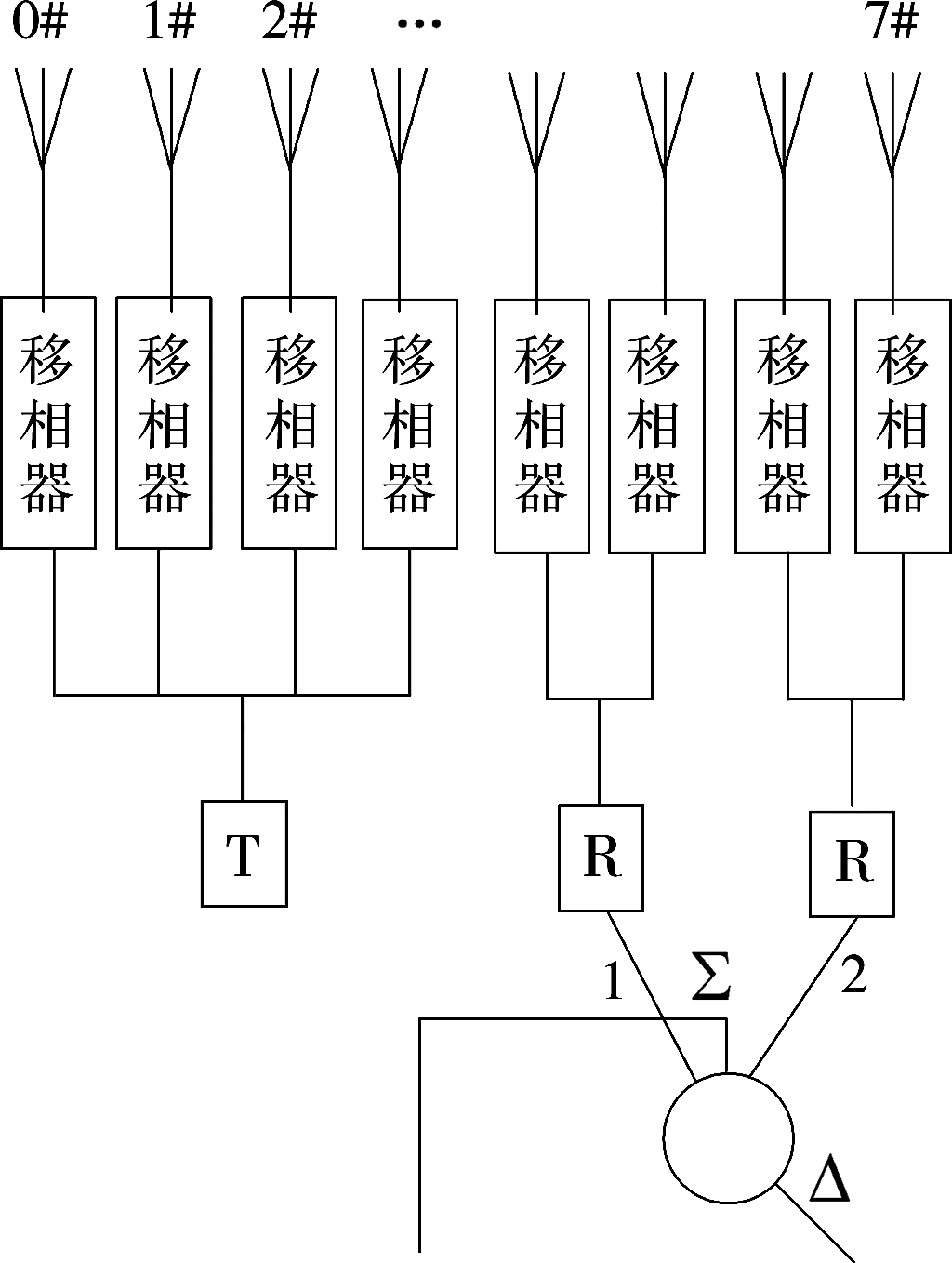
图3 宽波束收发实现方法
通道1的输出:
通道2的输出:
式中,θB为波束指向,θ为目标方位角,且N=2。那么输出的和、差波束如下式所示:
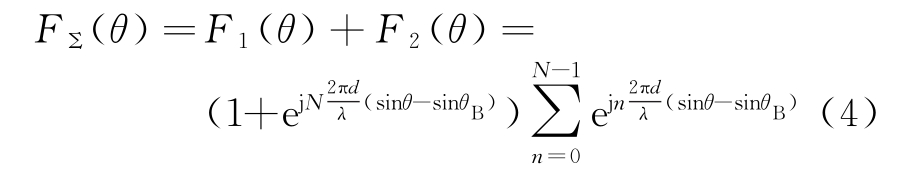

当θB=0时,其和、差波束仿真如图4所示。
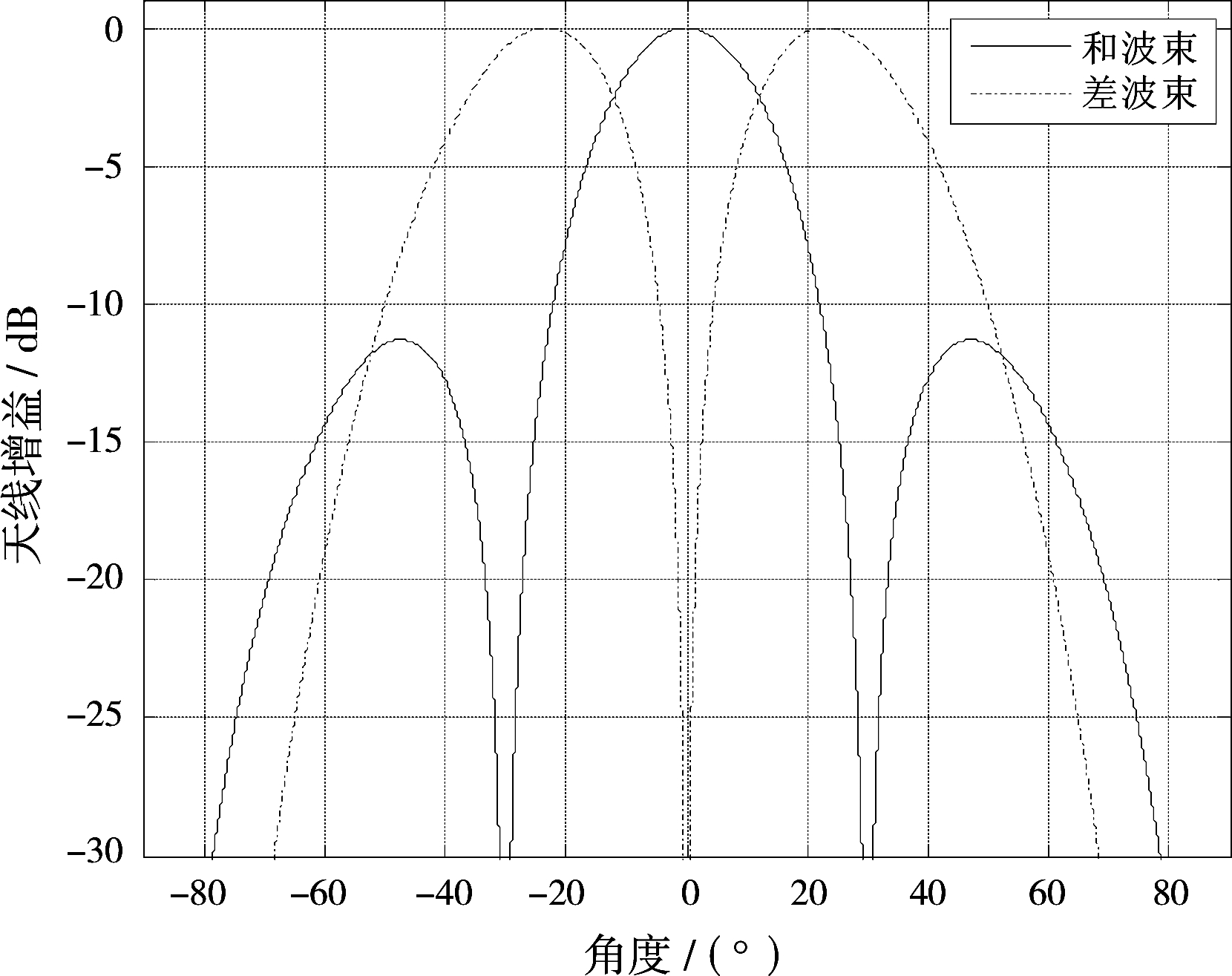
图4 和、差波束仿真图
根据泰勒公式,在一定误差范围内,得到差和比:
令![]() ,则目标偏角可以表示为
,则目标偏角可以表示为![]() ,由此,便可以判断目标方位角θ。
,由此,便可以判断目标方位角θ。
此时形成的波束宽度约为25.2°,相比于3.2°的波束宽度,该方法将总的搜索时间降低到窄波束搜索方案搜索时间的12.5%,由于只使用了1/4天线,收、发天线增益总计下降了18 dB,搜索距离降低到63.3 m,但仍满足近距离搜索的要求。
2.2 方案二:DBF接收
数字配相是数字多波束形成的一种方式,其原理如图5所示。

图5 数字配相原理图
选取0#通道为基准通道,则相邻通道空间相位差![]() ,其中θ为目标与阵列法线方向的夹角。对相邻通道进行相位补偿ΔϕBk=
,其中θ为目标与阵列法线方向的夹角。对相邻通道进行相位补偿ΔϕBk=![]() ,是按预定的波束指向θBk由信号处理机完成的,本文中k=0,1,…,6。阵列输出为
,是按预定的波束指向θBk由信号处理机完成的,本文中k=0,1,…,6。阵列输出为
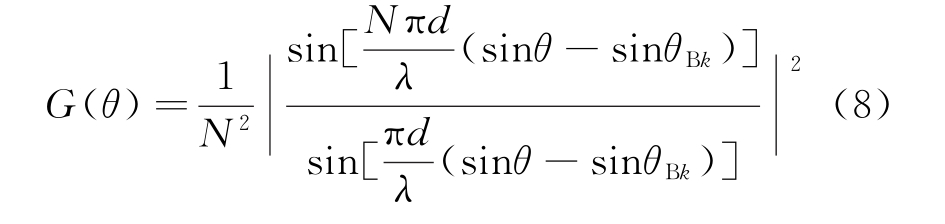
式中,N=28。最终得到归一化阵列方向图:
根据数字配相原理,方案二的实现方式如图6所示。使用前4个阵元作为发射天线,发射宽度为25.2°的宽波束;用后28个阵元接收,每个阵元构成1个接收通道,接收后在信号处理部分采用数字配相法,形成7个宽度约为3.6°的数字波束,进而判断目标的角度。
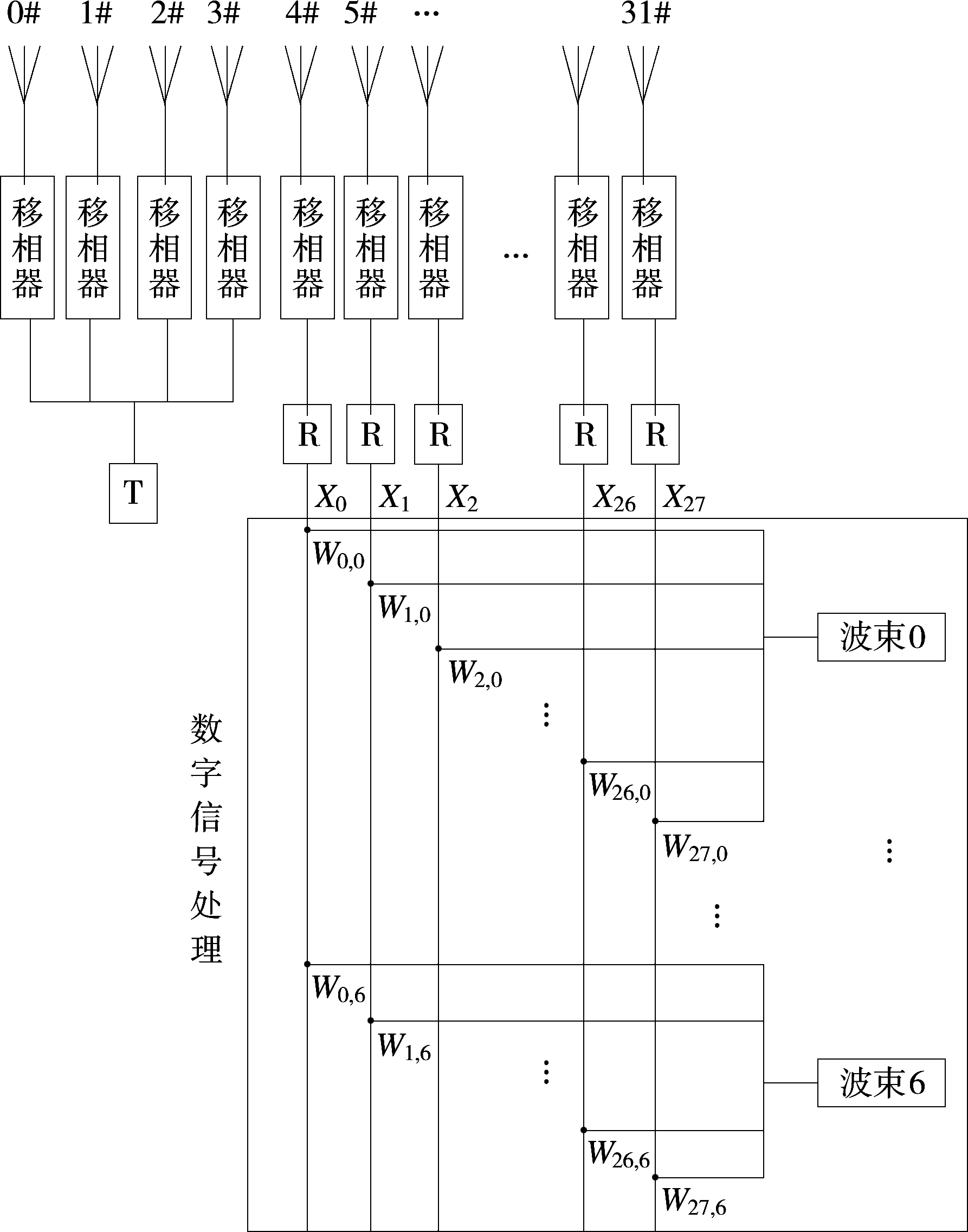
图6 DBF接收实现方法
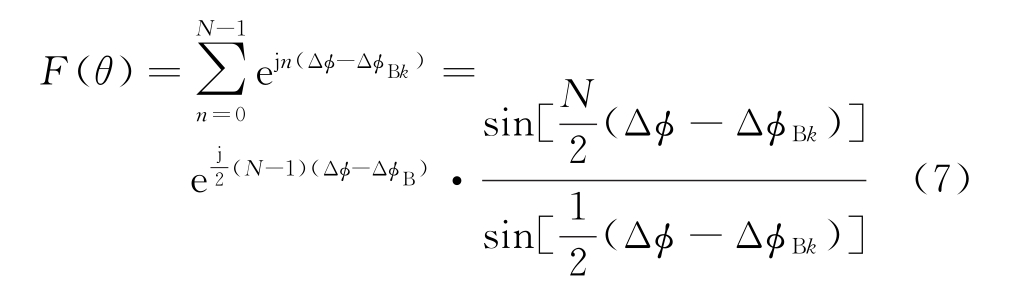
7个波束的形成过程如图6中数字信号处理部分所示[3]。令28个阵元接收到的信号矢量为X,X=[x0,x1,…,xi,…,x27],其中xi=Ii+jQi;第k个波束的接收信号矢量的加权矢量Wk=[w0k,w1k,…,wik,…,w27k]T,其中wik=exp[-jiΔΦBk];最终数字波束形成网络输出函数![]()
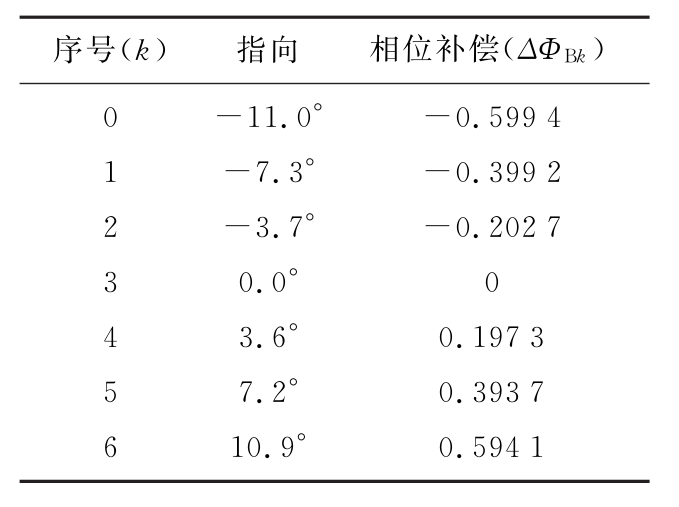
例如,当发射波束指向为0°时,接收波束需要覆盖±12.6°的范围,形成的7个接收波束在3 dB处交叠,其仿真结果如图7所示。7个波束的指向和相位补偿如表3所示。
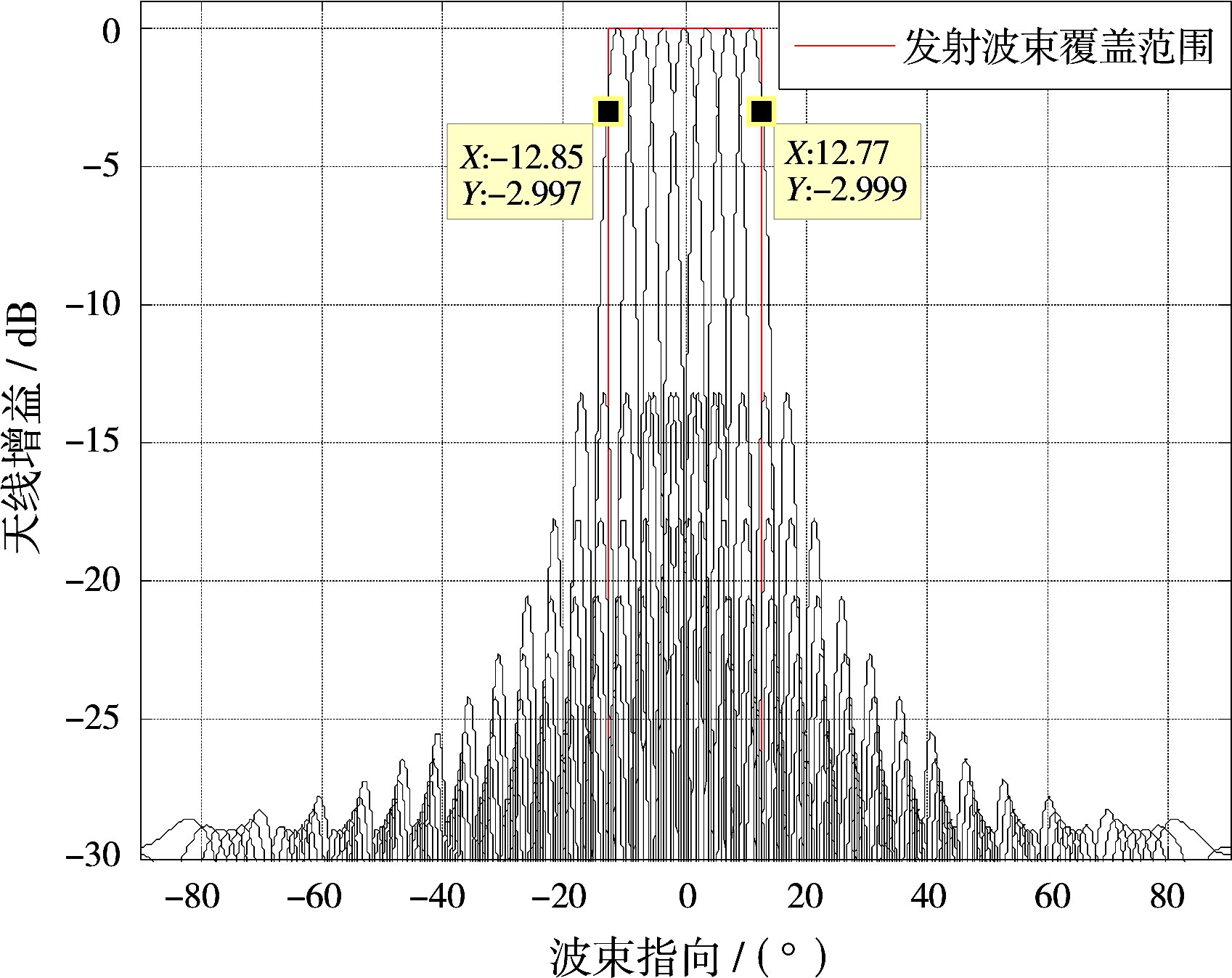
图7 多波束接收仿真图(发射波束指向为0°的情况)
表3 接收波束指向和相位补偿(发射波束指向为0°的情况)
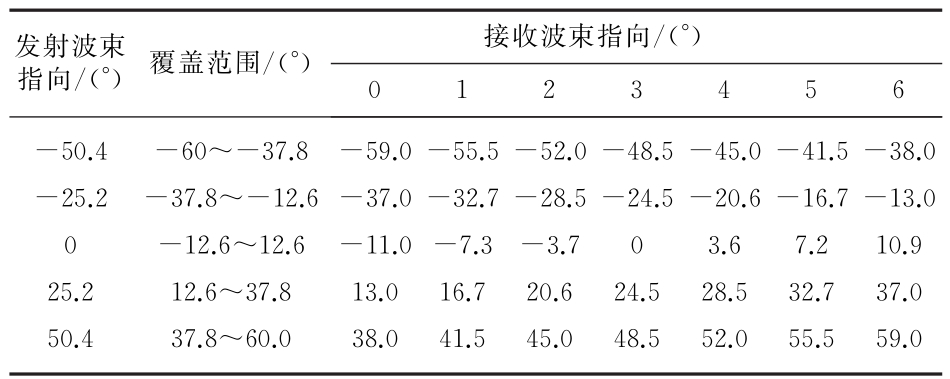
为实现±60°范围的扫描,发射波束的指向应分别为0°,±25.2°和±50.4°,其覆盖范围和相应的接收波束指向如表4所示。
表4 发射波束覆盖范围和接收波束指向
天线阵列中各射频通道的放大器、滤波器等模拟器件的固有误差和模拟电路的幅相特性时变性使得天线系统存在幅度误差和相位误差,引起通道的不一致性,导致波束形状的畸变,从而影响波束的指向精度[5]。此外,阵列单元的互耦作用也会对天线的性能产生不良影响。因此,在后续工作中,将对通道一致性以及收发互耦进行深入研究。
3 两种方案的对比
3.1 对比参数
天线口面和T/R模块利用率:如表5所示,方案二充分利用了天线口面和T/R模块,占用率较大。
测角精度:角度测量的极限误差[3]可以近似表示为
取Km=1.38。二者的波束宽度分别为25.2°和3.6°,计算得到的δ分别为3.95°和0.57°,可见方案二的测角精度较高。
搜索时间:两种方案均需要5个波束,搜索时间为17.51 ms。在不计其他处理时间的情况下,二者搜索时间相同。此时完成一帧搜索用时42.024 ms,满足车载雷达对帧速率的要求。
探测威力:根据雷达方程,探测距离:
式中,θB为天线扫描角度,k为玻耳兹曼常数,T0为等效噪声温度。经计算,方案一的搜索边界为63.0~89.1 m,方案二的搜索边界为72.5~102.5 m。方案二的探测距离更远。
表5 两种方案的对比

注:计算测角精度时未考虑波束随扫描角度增加而展宽。
3.2 对比结论
通过上文对两种方案的对比可以发现:方案二能充分利用天线口面和T/R模块,尽量减少增益损失;二者搜索时间大致相同,但方案二的探测威力更大;采用DBF技术,测角精度远高于方案一。
DBF技术在带来以上诸多优势的同时,也存在对信号处理的运算需求较高的问题。但随着信号处理芯片技术的发展和算法的优化,现有的数字信号处理运算能力可以满足DBF技术的需求。
4 结束语
DBF技术进一步发挥了相控阵灵活快速的波束扫描能力,可在不损失信噪比的情况下同时获得多个独立波束。此外,采用DBF技术可有效避免宽波束单脉冲测距的角闪烁问题,使车载雷达具有较强的多目标能力。同时,DBF技术还具有得到高性能超低副瓣天线等其他优点。因此,相比于宽波束收发,数字多波束接收是更好的方法,而且它不仅只适用于近距离、大角度搜索,也可应用于远距离搜索。将DBF技术应用于车载相控阵雷达,将极大节省搜索时间,精准定位障碍,同时具备抗干扰能力,是未来车载雷达的发展方向。
参考文献:
[1]王斌,刘昭度,何玮,等.车用测距雷达研究进展[J].传感器与微系统,2006,25(3):7-8.
[2]严鑫,黄永明,王海明,等.LFMCW车载防撞雷达信号处理模块研究[J].雷达科学与技术,2016,14(5):498-504.
[3]张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2006.
[4]郑驹.基于ARM的单脉冲和差测角雷达的数据处理设计与实现[D].南京:南京理工大学,2015.
[5]涂水平.DBF系统幅相一致性测试关键技术研究[D].北京:北京理工大学,2016.