0 引言
雷达弹道测量是靶场试验的重要方法,利用雷达对弹道参数进行测量已成为广泛使用的手段。在进行多目标的实时数据处理时,需要航迹起始建立机动目标统计模型来实现多目标跟踪滤波[1]。在高射频连发火炮初速测量中,由于弹丸的RCS小、离地高度低、雷达起始检测位置距离炮口近等特点,导致了地杂波、炮口焰、炮口烟对雷达检测影响较大,弹丸的精确检测较为困难[2]。如果采用传统的航迹起始方法,由于初始时刻的弹丸检测结果质量不高,将会严重影响航迹起始质量,从而导致弹道测量出现异常。
由于连发弹丸初速测量对精度要求远大于处理速度要求这一特点,本文提出了一种改进的航迹起始与航迹跟踪算法。首先,进行最优起始数据搜索,在所有时刻的量测中搜索出检测质量最高的时刻作为航迹起始时刻;然后,开始航迹起始,建立机动目标的统计模型;最后,进行双向α-β-γ跟踪滤波方法,利用全弹道的测量信息以起始航迹为中心,向前后时刻分别进行跟踪滤波,从而形成高精度弹道。
本文利用改进的航迹起始与跟踪算法对7连发的高射频火炮雷达回波实测数据进行了处理,并且与传统的航迹起始算法进行了对比,结果表明该改进算法具有更高的可靠性与稳定性。
1 航迹起始改进算法
1.1 高射频连发火炮初速测量数据处理
在对连发火炮进行初速测量时,由于炮口火焰与后效期的影响,使得初速的测量不准确。在利用连续波雷达进行弹丸初速测量时,多采用外推技术。通过外弹道测量数据处理对雷达测量数据进行航迹起始、数据关联、跟踪、滤波、平滑预测等运算得到弹丸飞行全过程的弹道信息,最终根据出膛时刻外推得到弹丸的真实初速。
传统弹道测量多目标数据处理流程如图1所示,采用实时处理方式,从第一帧数据开始,进行预处理、航迹起始、跟踪滤波过程,每输入一帧数据进行一次数据处理。传统的航迹起始方法以第一帧数据作为起始数据[3-4]。航迹起始的可靠性受到第一帧数据的影响较大。在连发的高射频弹丸初速测量中,由于雷达起始检测位置距离炮口较近、弹丸速度高、RCS小等原因,第一帧数据中会产生较大干扰,使多目标跟踪效果较差,从而导致弹道测量的可靠性与稳定性普遍不高[5]。
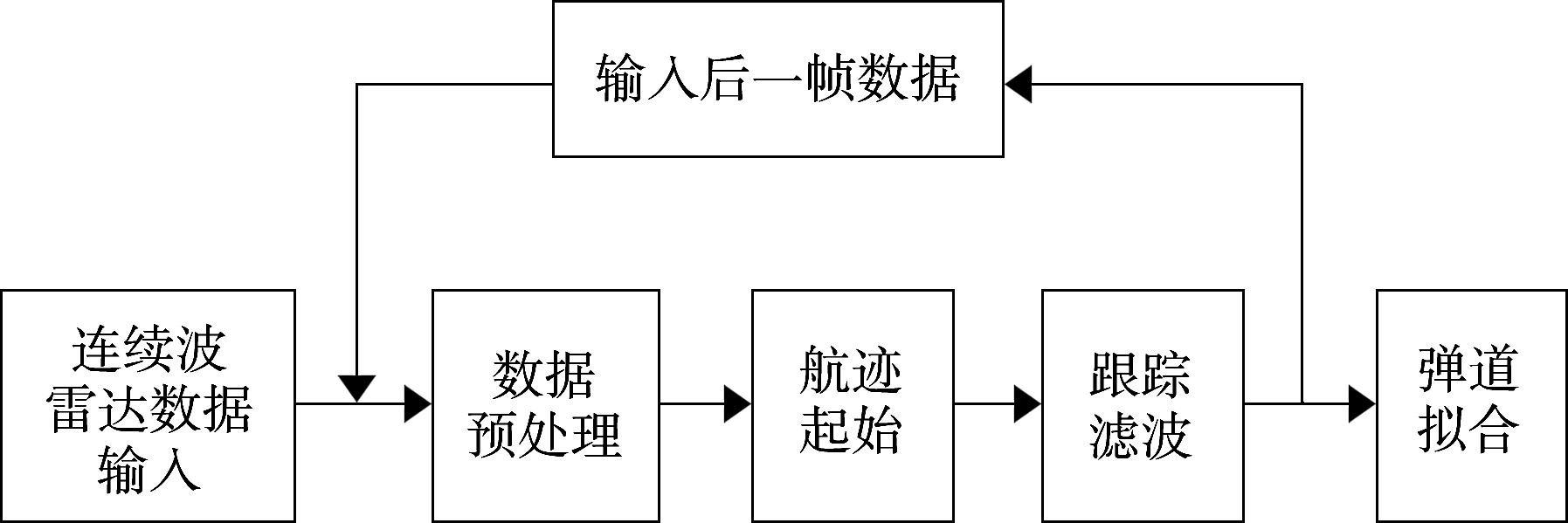
图1 传统多目标弹道数据处理流程
初速测量弹道试验对弹道实时数据处理速度要求不高,但是对多目标数据关联的精度要求较高。本文针对这一特点,提出了一种改进的航迹起始与跟踪方法,流程如图2所示。输入雷达数据但是不进行数据处理,当所有数据输入完成后选择检测效果最佳数据作为起始,进行航迹起始。最后从起始航迹开始进行双向跟踪滤波,得到每发弹丸的弹道估计。该算法避免了第一帧数据中干扰带来的误差,大大增强了航迹起始与跟踪的准确性与稳定性。
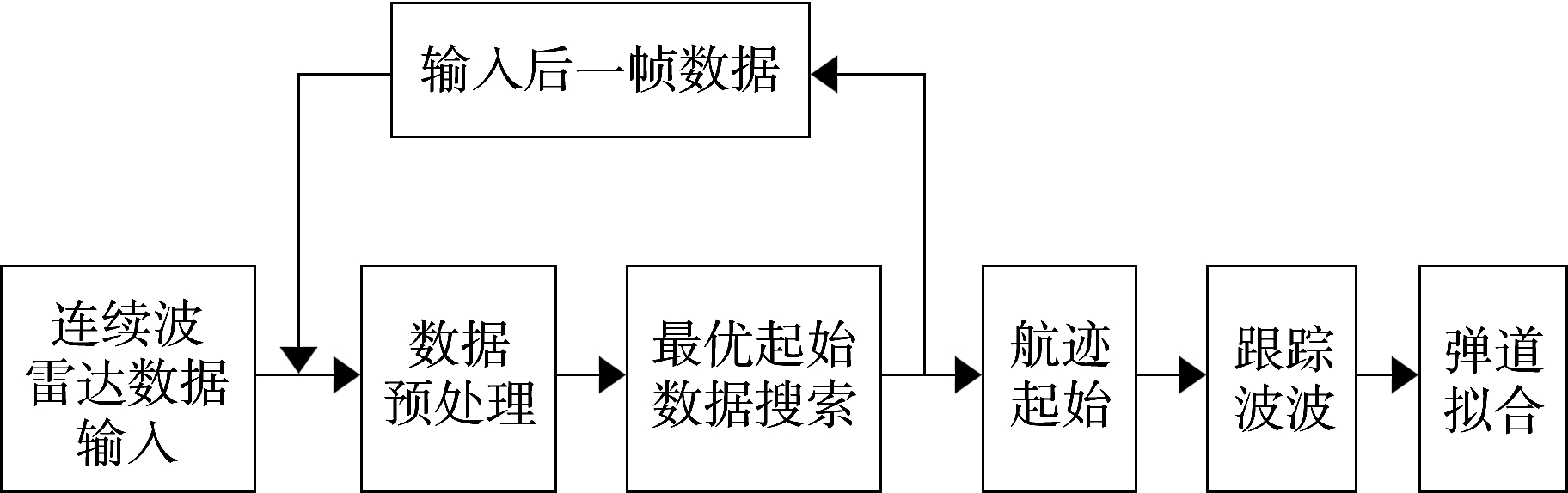
图2 改进多目标弹道数据处理流程
1.2 最优起始数据搜索算法
设置帧长为n;第i帧数据中目标个数为ki,每一帧数据内第j个目标对应的速度、时间为vj,tj;发射弹丸个数m_k,速度判决区间(vmin,vmax),最大发射间隔δt。其中,m_k,vmin,vmax与δt可以根据试验时发射的弹丸种类得到。
最优起始数据判决条件有以下两点:
1)干扰最少
2)不存在异常数据
最佳起始数据搜索算法流程图如图3所示。
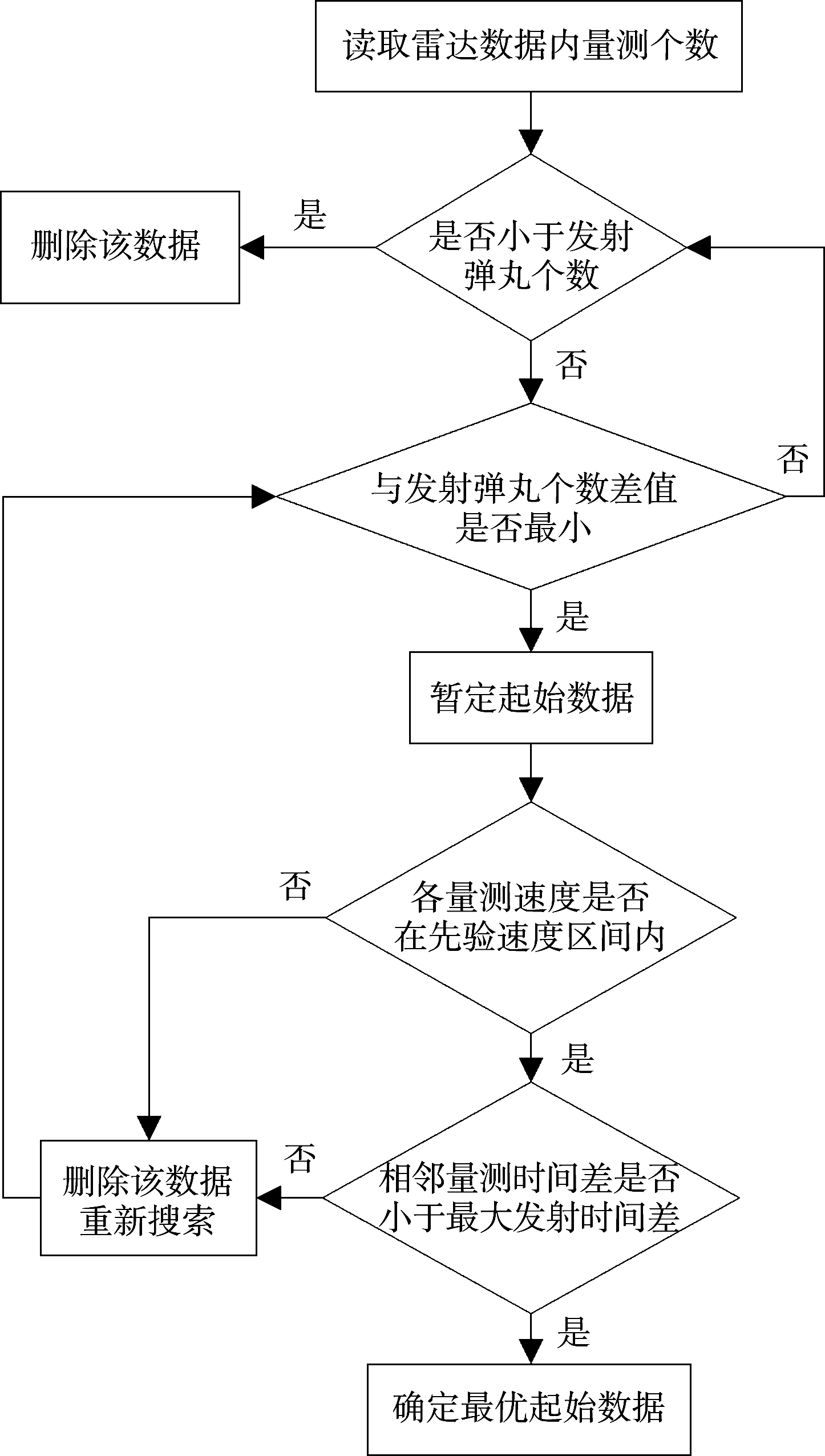
图3 最佳起始数据搜索算法流程
最优起始数据搜索过程如下:
1)初始化采样次数计数器i。
2)将ki与m_k进行比较。若ki<m_k,删除对应该数据并跳转步骤5);若k=m_k,进行步骤3);若k>m_k,跳转步骤4)。
3)遍历i,若对于任意的vj,tj满足vj∈(vmin,vmax)且(tj+1-tj)<δt,跳转步骤8);若不满足,跳转步骤5)。
4)计算数据目标个数与发射弹丸个数差值储存在向量P中,pi=k-m_k。
5)i=i+1,若i≤n,跳转步骤2)。
6)遍历向量P,找到P中最小值pi。
7)遍历i,若对于任意的vj,tj满足vj∈(vmin,vmax)且(tj+1-tj)<δt,跳转步骤8);若不满足,删除pi跳转步骤6)。
8)设置第i帧数据为初始数据,搜索完成。
1.3 改进的航迹起始算法
高射频火炮初速测量航迹起始采用基于逻辑的方法,过程如下:
1)通过最优起始数据搜索算法得到起始时刻k。
2)在第k帧数据内每一个量测点建立初始航迹点。
3)根据下一帧数据的量测信息进行预测,得到下一帧数据的关联区域。将在关联区域内的量测进行航迹拓展。若关联区域内存在多个量测,则采用最邻近准则选取最邻近关联区域中心点的量测;若关联区域没有量测,则删除对应的初始航迹点。
4)对k+2时刻数据重复上述过程,航迹起始完成。
2 双向α-β-γ跟踪滤波
α-β-γ滤波是一种简化了卡尔曼滤波的常增益滤波方法。α-β-γ滤波适用于高速弹丸的运动模型并且计算过程简单,非常适用于弹道初速测量中的跟踪滤波[6]。传统的α-β-γ滤波算法是按时间顺序由初始时刻从前至后的递推过程,不适用于当前从中间时刻起始的算法。
本文提出了一种双向α-β-γ滤波。该滤波过程分为前向滤波与后向滤波两部分。假设起始航迹的时刻为k,k+1,k+2,在k-1到第1时刻进行前向滤波;在k+3到结束时刻进行后向滤波。
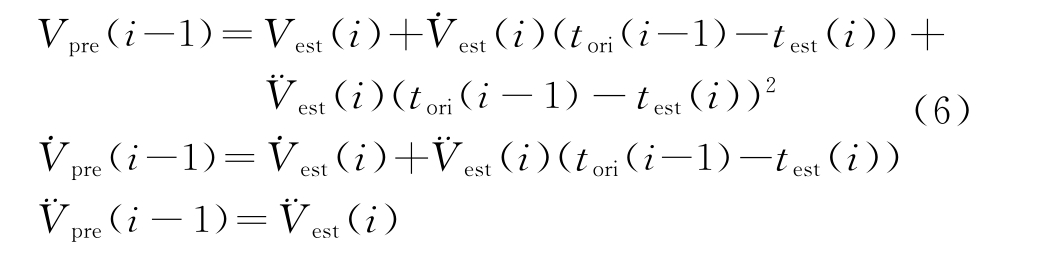
进行前向滤波时假设目标从k+2时刻开始到第1时刻作近似匀加速运动,从k-1时刻开始进行α-β-γ滤波,直到第1时刻滤波完成。α-β-γ前向滤波方程如下:
1)目标状态方程
在初速测量中,目标的状态主要包括速度、加速度、加加速度。
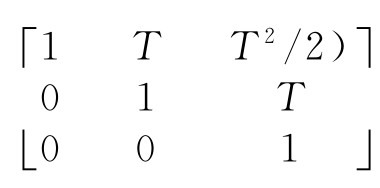 为状态转移矩阵;
为状态转移矩阵;![]()
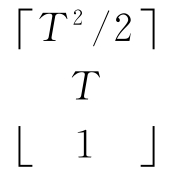 为噪声分布矩阵;n(i)为均值为零的高斯白噪声。
为噪声分布矩阵;n(i)为均值为零的高斯白噪声。
2)量测方程
量测矩阵H(i)=[1 0 0],量测噪声W(i)为高斯白噪声,均值为零。
3)α-β-γ滤波器公式
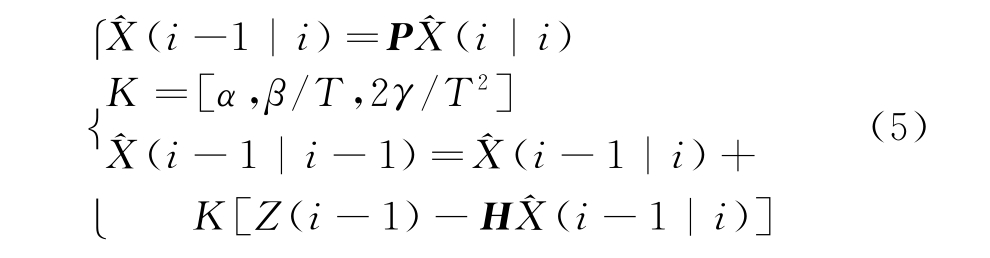
i从k到2进行取值,i-1时刻的参数估计如下:
式中,![]() 为当前时刻加速度匹配值,
为当前时刻加速度匹配值,![]() 为当前时刻加加速度匹配值。
为当前时刻加加速度匹配值。
i-1时刻目标运动状态参数的估计值如下:
增益系数α,β,γ通过临界阻尼选择法得到。通过跟踪滤波得到估计值,直到第1距离门数据完成滤波。后向跟踪滤波过程与传统跟踪过程相同,在此不再赘述。采用双向跟踪滤波的方法充分利用了全弹道信息,可以得到更加准确的弹道估计。
3 实测数据处理
本文利用传统航迹起始跟踪算法和改进的航迹起始跟踪算法分别对7连发火炮弹丸连续波雷达实测数据进行了处理,得到的航迹起始结果分别如图4、图5所示。图4为传统航迹起始算法得到的起始航迹,从图中可以看出,利用传统弹迹起始算法检测出了12条航迹,出现了5条虚假航迹。图5为改进的航迹起始算法的结果图,从图中可以看出,利用该算法检测到了7条起始航迹,相比于传统算法减少了大量虚假航迹,具有更高的可靠性。
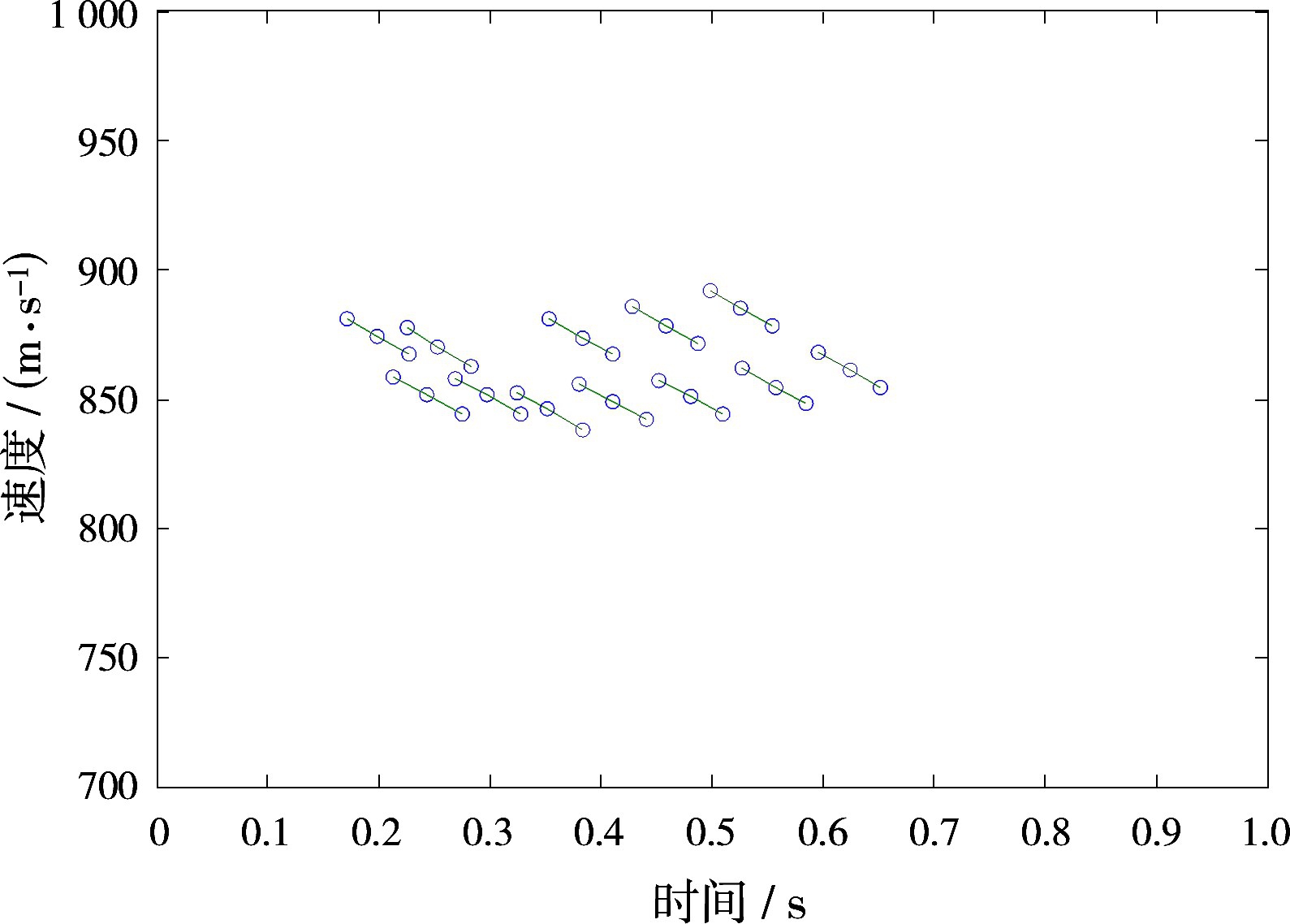
图4 传统弹迹起始算法
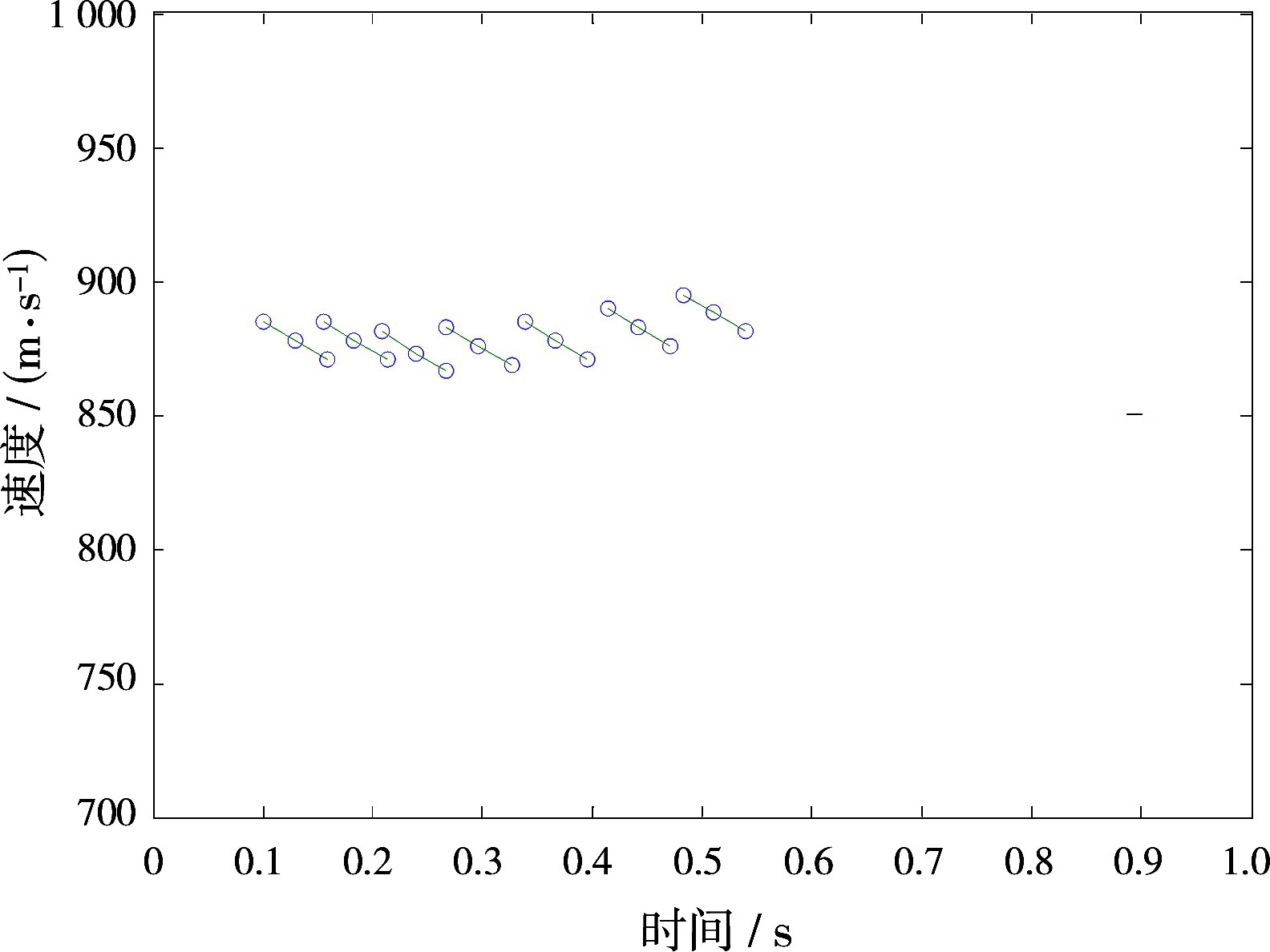
图5 改进弹迹起始算法
图6为传统算法的滤波结果,从图中可以明显看出,弹丸点迹与弹丸运动模型偏差较大,主要是由于传统航迹起始算法中出现了大量的虚假航迹,导致跟踪滤波得到的结果存在较大偏差。图7为改进后的弹迹关联算法得到的目标点迹,从图中可以清楚地看出,7发弹丸在作减速运动,符合弹丸运动模型。
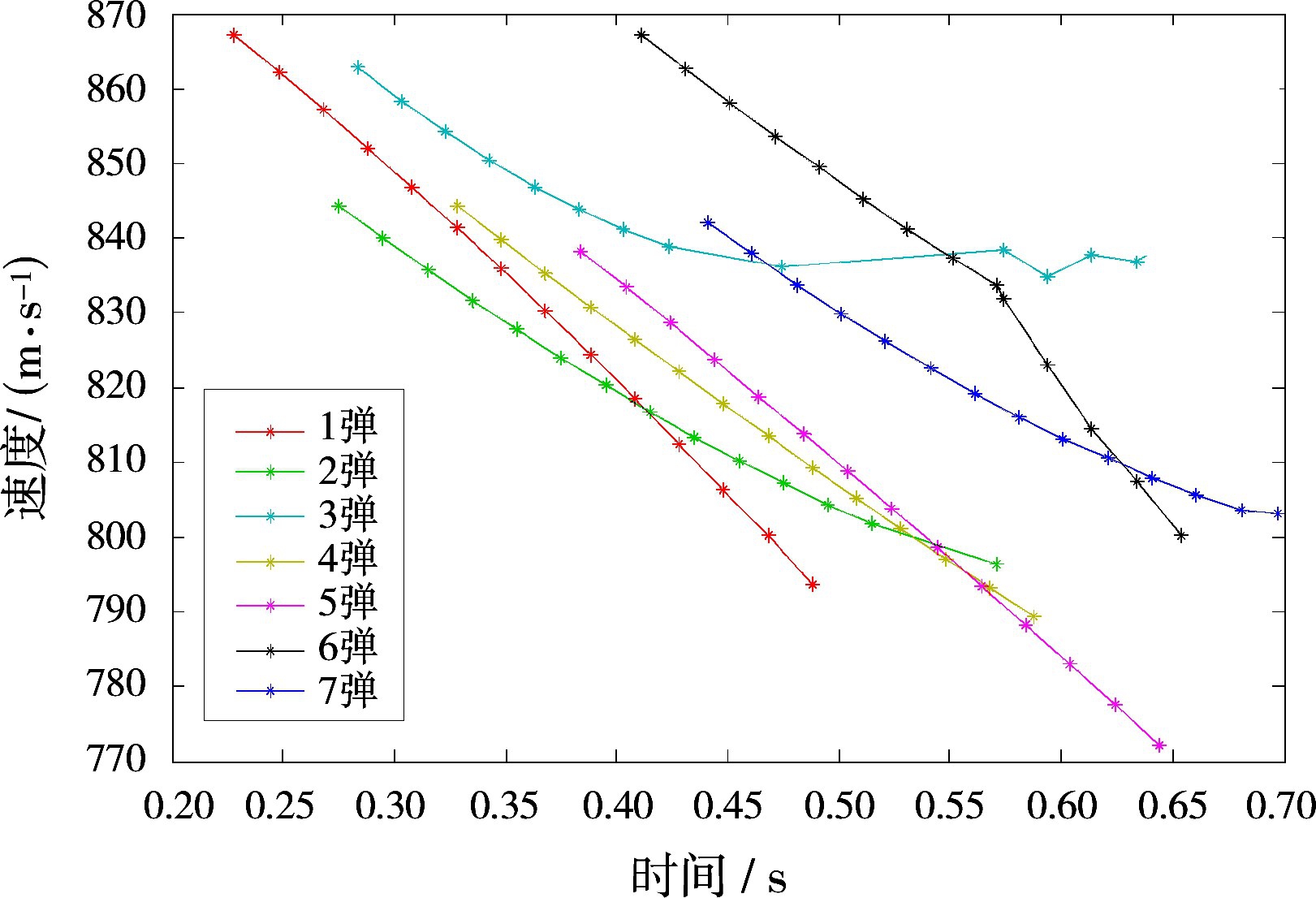
图6 传统算法跟踪滤波结果
图7 改进算法跟踪滤波结果
表1为弹丸发射时间与外推出的7发弹的初速,平均速度为892 m/s,与理论值900 m/s的误差在1%以内,误差在合理区间内,达到了初速测量要求。
表1 弹丸发射时间与外推初速度
4 结束语
本文针对当前弹道测试中多目标数据处理算法在进行高射频连发火炮初速测量时出现的弹道测试异常的问题进行了分析,并且根据弹道初速测量的特点提出了一种改进的航迹起始与跟踪滤波算法。首先,通过最优起始数据搜索算法得到最优起始数据开始航迹起始,得到更佳精确的起始航迹。最后,采用双向α-β-γ滤波对起始航迹进行跟踪滤波。本文将改进的航迹起始与跟踪算法在高射频连发弹丸初速测量中进行了应用,并通过对7连发弹丸雷达回波实测数据的处理,验证了该改进算法的正确性。最终的处理结果显示,在弹道测试中,该改进算法比传统算法具有更高的抗干扰能力。
参考文献:
[1]郭军海.弹道测量数据融合技术[M].北京:国防工业出版社,2012:205-206.
[2]张宏伟,鞠峰,何强,等.高射速火炮连发初速测量技术研究[J].弹箭与制导学报,2014,34(1):176-179.
[3]刘红亮,但晓东,周生华,等.一种基于跟踪信息的多基雷达系统航迹起始算法[J].电子与信息学报,2015,37(10):2536-2540.
[4]宫峰勋,戴丽华,马艳秋.自适应选取聚类中心K-means航迹起始算法[J].哈尔滨工业大学学报,2014,46(5):113-119.
[5]杨荣军,王良明,修观,等.利用雷达测量数据的实际弹道重建[J].弹道学报,2011,23(3):43-46.
[6]荆晓鹏,侯明善,曲润峰.模糊自适应α-β-γ滤波及应用[J].弹箭与制导学报,2004,24(5):504-506.
