0 引言
现代舰载防空武器系统都具备拦截多目标的能力,舰载防空武器系统试验时,必须考核系统拦截多目标的性能。为此,靶场必须具备多目标供靶能力。为武器系统试验提供真实的多批空中靶标,不仅试验成本提高,也给试验组织实施带来一定难度。为了解决这一问题,靶场研制了一种应答式射频目标模拟器,能在同一方位上产生多批目标,一定程度上解决了靶场多目标供靶难题。但是,这种传统的目标模拟器只能模拟同一方位上的目标,当需要考核武器系统多方位上的拦截性能时,就必须配置多个目标模拟器。本文研究了一种新方法,用该方法设计的应答式射频模拟器可以模拟多方位上的多批目标,解决了武器系统多方位拦截能力考核中的多目标供靶难题。
1 副瓣注入多方位目标模拟方法的基本原理
1.1 传统应答式射频目标模拟器模拟目标的原理
应答式射频目标模拟器模拟目标的原理是[1]:雷达和模拟器工作在能通视的条件下,雷达天线波束扫描到模拟器天线时,模拟器接收雷达的高频辐射脉冲,经过放大、检波、解调,得到模拟目标所需的雷达参数,以接收到的雷达脉冲前沿为同步脉冲,把需要模拟目标的距离、速度、RCS等信息调制到发射脉冲上,经延时放大后发射,供雷达接收,雷达就能收到具备特定信息的目标回波。
传统的应答式射频目标模拟器只能和雷达天线的主瓣进行射频信号收发交联,因此,只有当雷达天线主瓣对准模拟器时,模拟器才能完成目标的模拟,也就是模拟器只能在一个方位上模拟目标。
1.2 副瓣注入多方位目标模拟方法的基本原理
本文提出的新方法原理是:通过合理设计目标模拟器的参数,当雷达天线主瓣、副瓣扫过模拟器天线主瓣时,雷达和模拟器均能建立起正常的信号收发交联,在雷达上显示的是在模拟器为中心位置和模拟器左右方向相隔主副瓣夹角的3个目标,实现一个模拟器同时模拟多方位目标的目的。
1.2.1 实现副瓣注入多方位目标模拟的基本条件[2]
为了实现模拟器和雷达天线主副瓣之间射频信号收发交联,必须满足下列条件:
1)雷达的动态范围必须大于雷达的副瓣电平;
2)模拟器的动态范围必须大于雷达的副瓣电平;
3)模拟器的发射功率满足雷达主副瓣接收要求;
4)模拟器的接收机灵敏度必须满足模拟器接收雷达主副瓣要求。
对于条件2)~4),可以通过设计模拟器指标来实现;对于被试雷达来说,技术指标已确定,是否满足条件1),必须对其进行分析。
接收机动态范围[3]定义为满足接收机正常工作的最大输入能量Lmax与最小输入能量(接收机灵敏度)Lmin的比值,即
Lmin越小,表明接收机接收微弱信号的能力越好,雷达的作用距离就越远;Lmax越大,表明接收机抗饱和能力越强;D越大,表明雷达接收机性能越好。雷达接收机放大信号范围如图1所示。
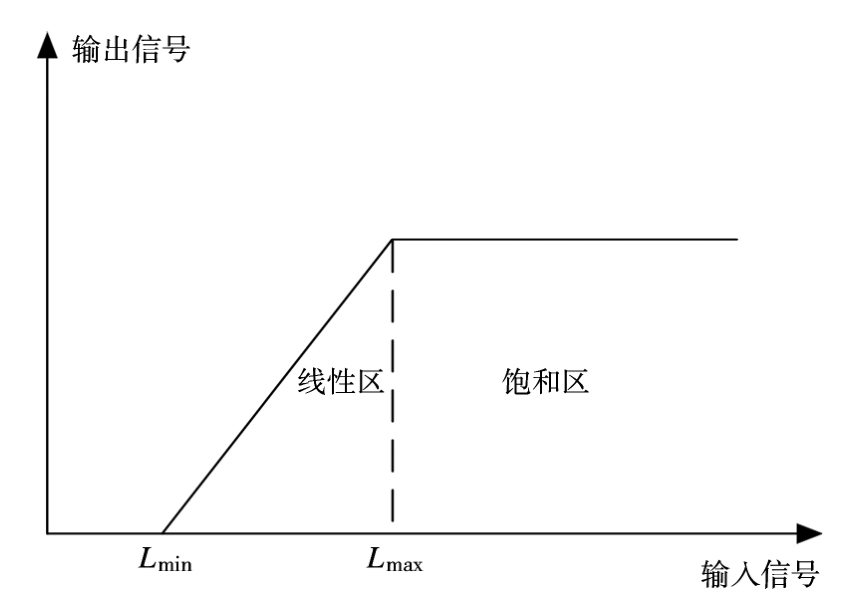
图1 雷达接收机放大信号范围
从图1可以看出,只有当接收机输入功率L满足Lmin<L<Lmax时,接收机才可能以放大倍数K=L输出/(Lmax-Lmin)对输入信号进行线性放大,当输入信号小于Lmin或大于Lmax时,接收机都不能正常工作。
也就是说,为了模拟器和雷达天线主副瓣之间射频信号收发交联,模拟器发射的信号功率必须足够大,保证雷达副瓣接收功率大于Lmin,但发射功率又不能无限制增大,还必须保证雷达主瓣接收功率必须小于Lmax。由于雷达主副瓣接收到的功率除了与模拟器发射功率、雷达和模拟器之间距离有关外,还与雷达主副瓣增益有关。因此,必须分析雷达主副瓣增益及它们之间的关系。
把雷达第一副瓣增益与主瓣增益的比值定义为副瓣电平[4](F)。为了保证雷达主副瓣同时和模拟器交联工作,雷达天线端收到的信号功率必须满足一定的范围,设满足雷达主瓣接收的最小功率为1,则满足雷达副瓣接收的最小功率为1/|F|,也就是说,雷达接收机应该在信号强度为1/|F|倍的范围内,既能接收小信号,又不至于信号过大而过载,即要求雷达必须满足D>1/|F|。一般雷达是否满足这一条件,必须对雷达的天线方向图进行分析。
1.2.2 雷达主副瓣之间的关系分析
下面用一个近似的数学模型[5]分析雷达主副瓣增益、主副瓣夹角之间的关系。
对于抛物面天线、喇叭天线、阵列天线,当天线口径大于雷达波长5倍时,归一化天线增益可近似表达为

式中,G(θ)为天线任意方位角处θ的增益,G(0)为天线主瓣最大增益,d为天线口径,λ为雷达波长。归一化天线增益方向图如图2所示。
通常情况下,雷达第一副瓣最大值出现在sinx=±1处,此时:
取λ=0.1 m,d=1.5 m,则θ=±5.7°。
当θ=±5.7°时,即副瓣电平F为
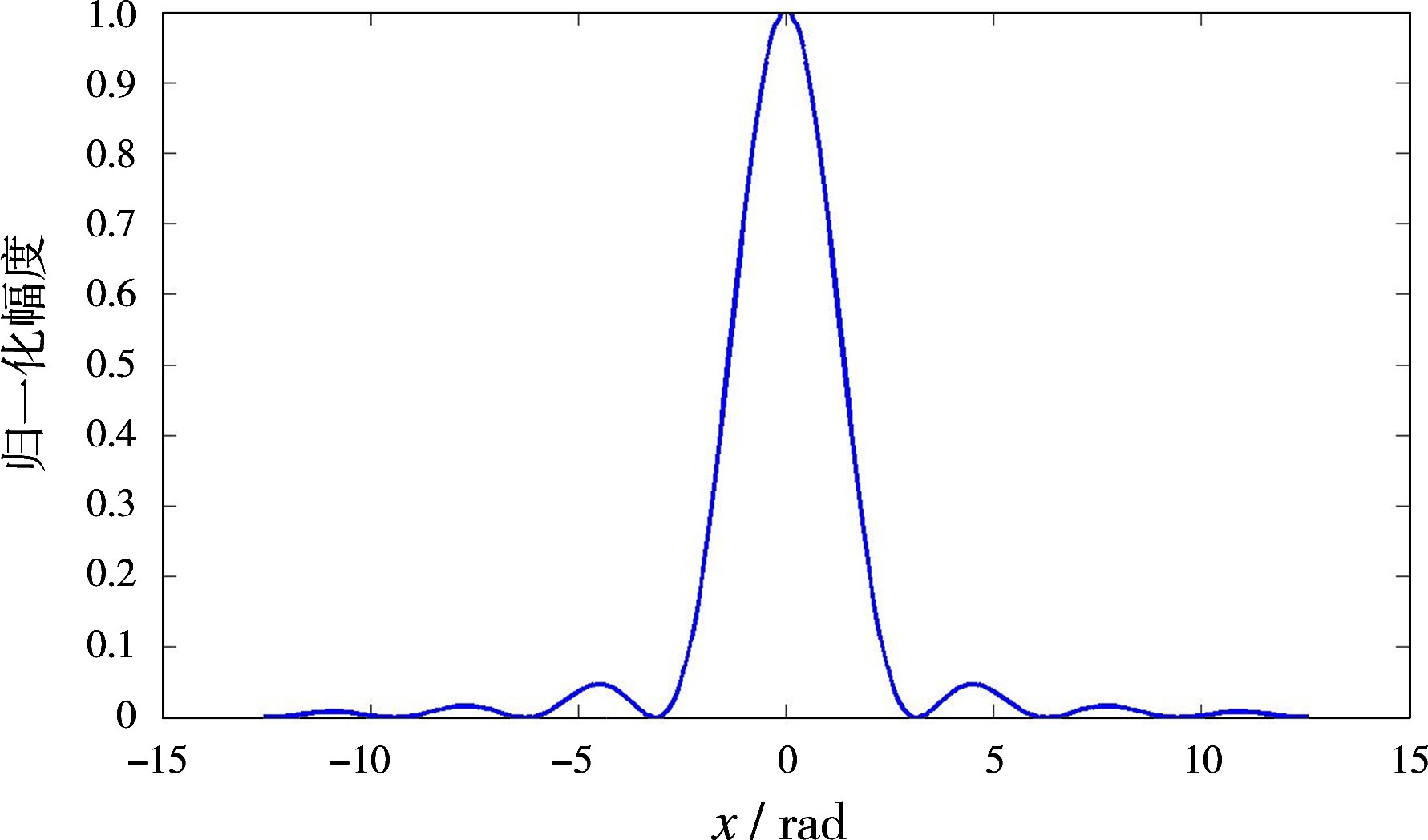
图2 归一化天线方向图
上述研究结果表明,对于采用抛物面天线、喇叭天线、阵列天线的雷达,当λ=0.1 m,d=1.5 m时,其副瓣电平近似为-13.5 dB(主瓣增益比副瓣增益大22倍左右),雷达第一副瓣与主瓣的夹角为5.7°,一般雷达第一副瓣与主瓣的夹角在几度至几十度范围内(肯定大于雷达方位角分辨率)。对于采用副瓣抑制、副瓣对消等技术的雷达,副瓣电平的绝对值稍大一些,一般在-20 dB(100倍)左右,而一般雷达的动态范围在60 d B左右,满足D>1/|F|的基本条件。
综上所述,只要合理设计模拟器的技术指标,就可以用一个模拟器模拟雷达主瓣和两个第一副瓣上的3个目标,3个目标在方位上的最小角度在几度到几十度范围内。
2 副瓣注入多方位目标模拟器的主要指标设计
设雷达的技术指标如下:雷达发射功率P;雷达最小可检测功率Lmin;雷达天线主瓣增益Gz;雷达天线副瓣增益Gf;雷达工作波长λ;雷达接收机正常工作最大不饱和功率Lmax;雷达副瓣电平F;接收机动态范围D。
当雷达和目标模拟器之间的距离为R,需要设计的模拟器参数如下:发射天线增益Gmf;发射机功率Pm;接收天线增益Gmj;接收机灵敏度Lmmin;接收机动态范围Dm;工作波长λ。
根据二次雷达方程[6],对模拟器主要指标进行设计:

2.1 模拟器发射端参数设计
模拟器发射端设计参数主要是发射机功率和天线增益。
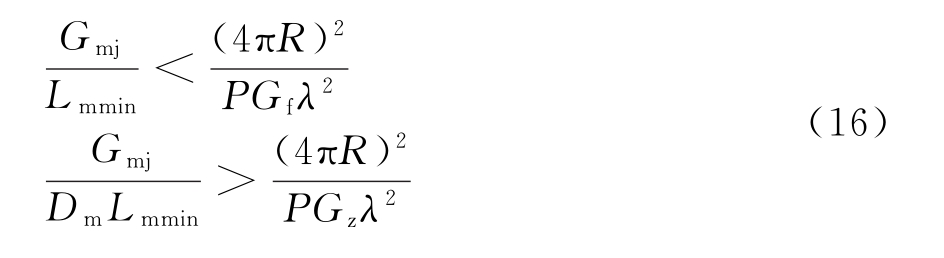
为了保证雷达副瓣能收到模拟器的发射信号,目标模拟器发射机参数应满足:
同时,为了保证雷达主瓣接收到信号后不过载,目标模拟器发射机参数还应满足:
根据动态范围的定义,可将式(9)变为
保证雷达主副瓣同时能正常工作的模拟器发射端参数为

2.2 模拟器接收端参数设计
模拟器接收端设计参数主要是接收机天线增益、灵敏度和动态范围。此时的二次雷达方程中,雷达相当于信号发射源,模拟器为信号接收机。
根据
当雷达副瓣对准模拟器时,应保证模拟器能接收到雷达信号,即
当雷达主瓣对准模拟器时,应保证模拟器不过载,即
根据动态范围的定义,可将式(14)变化为
模拟器接收端参数应满足的条件为
3 对设计结果的仿真计算
为了验证模拟器主要指标的设计结果在工程上能否实现以及实现的难易程度,需要对设计结果进行仿真计算。
设被试雷达为普通的脉冲雷达,取其技术指标如下:雷达发射脉冲功率为50 k W,动态范围为40 d B,灵敏度为-90 d Bm,天线主瓣增益为30 d B,天线副瓣增益为5 d B,波长为10 cm,取R=30 km。
3.1 对模拟器发射系统设计指标的仿真计算
将式(11)变形,得到下面两个公式:
以Pm为横坐标、Gmf为纵坐标,分别以式(17)、式(18)绘制两条曲线,如图3~图5所示。
图3 正常模拟多目标时模拟器发射机功率与发射机天线增益取值范围
图4 正常模拟多目标时模拟器发射机功率与发射机天线增益取值范围局部放大图
图5 正常模拟多目标时模拟器发射机功率与发射天线增益最优参数取值图
图3中,两条曲线中间包围的部分就是满足不等式(11)条件的区域。其中图4、图5是图3的局部放大,图5中实线Ⅲ为实线Ⅰ和实线Ⅱ的中间线,代表保证雷达主副瓣同时能正常工作的模拟器发射端的最优参数,在实线Ⅲ上选10个点,如表1所示。
表1 模拟器发射端的最优参数对应表

从表1可以看出,对于一部普通的脉冲雷达,当雷达和模拟器相距30 km时,保证雷达主副瓣同时能正常工作的模拟器发射端的最优参数,发射功率在3.7~18.3 W之间,发射天线增益在4~20之间,这在工程上是很容易实现的。
3.2 对模拟器接收系统设计指标的仿真计算
仿照3.1节的方法,将式(13)、式(14)变形为
式(19)中有3个变量,为了分析问题方便,取变量Dm定值,分析其他两个变量的相互关系。为了检验模拟器接收系统在工程上实现的难易程度,Dm取工程上容易实现的数值。
以Gmj为横坐标、Lmmin为纵坐标,取Dm为50 d B,绘制仿真曲线如图6所示。其中曲线Ⅰ、Ⅱ、Ⅲ代表的意义与图3相同。
以Gm为横坐标、Lmmin为纵坐标,取Dm分别为50,45,40,35和30 dB,以式(19)右式的结果绘制曲线,如图7所示。
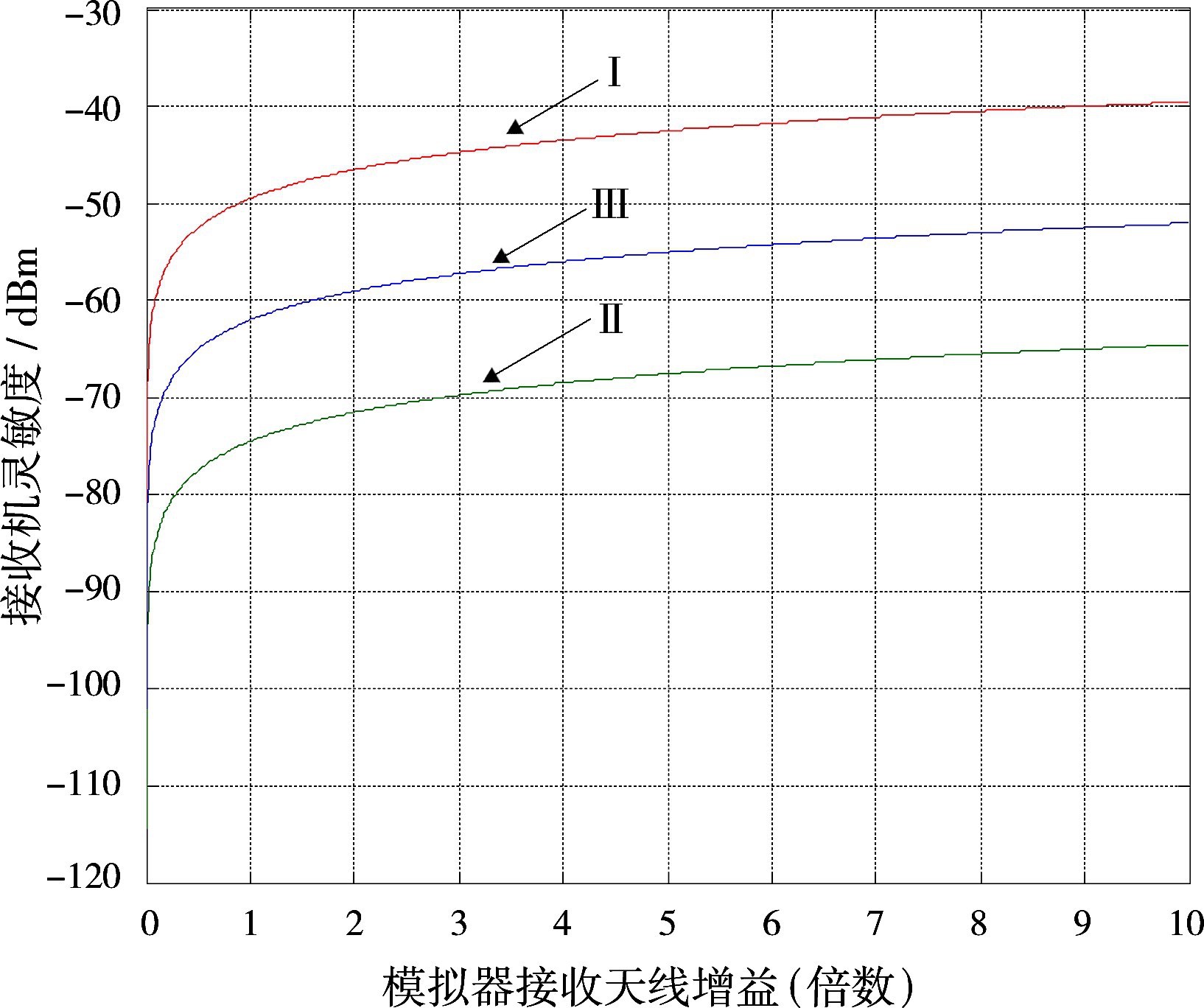
图6 正常模拟多目标时模拟器接收机天线增益与灵敏度取值范围
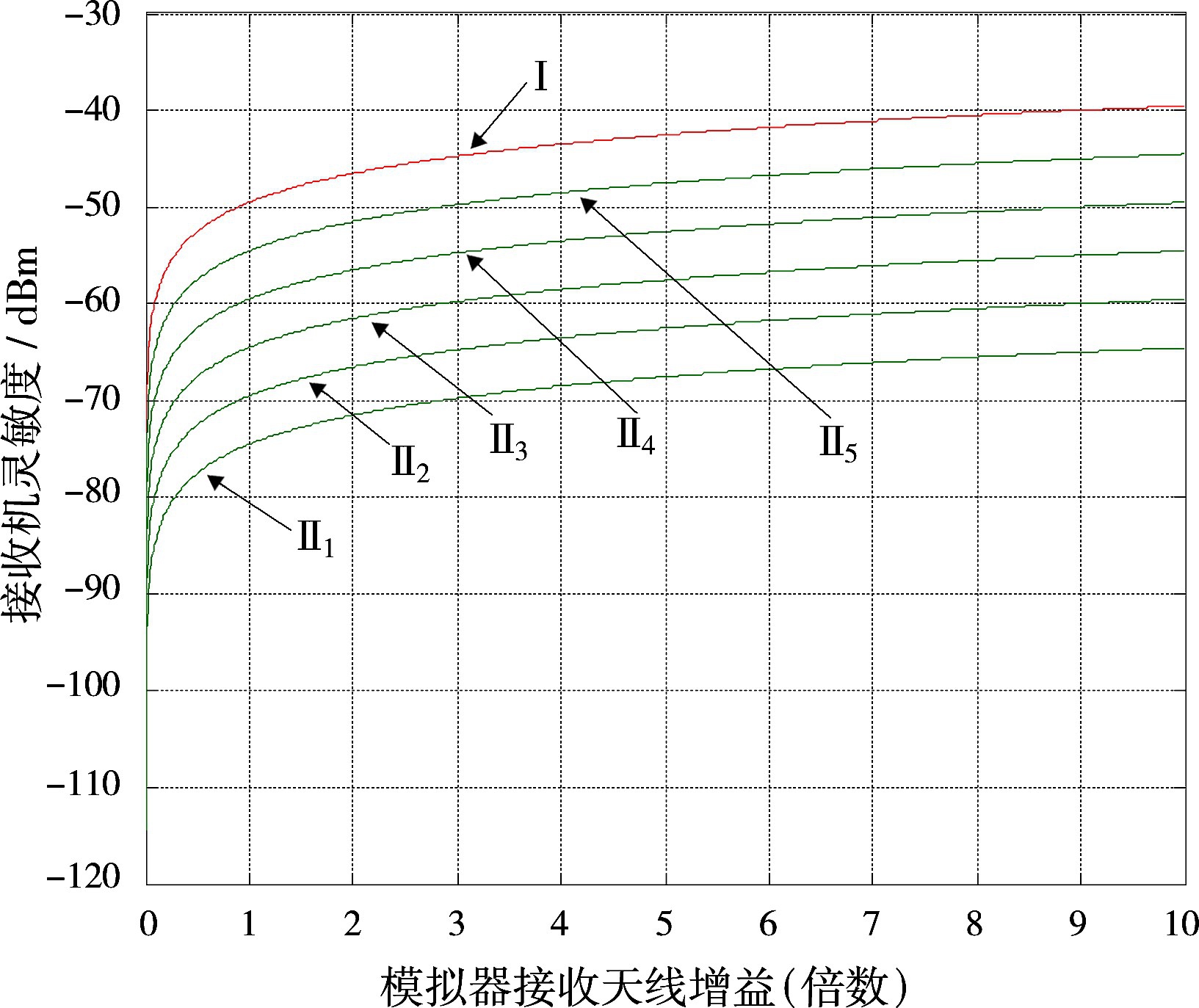
图7 正常模拟多目标时模拟器接收机天线增益与灵敏度最优参数取值范围
仿照3.1节中的方法,曲线Ⅱ1~Ⅱ5代表当雷达主瓣对准模拟器时模拟器不过载、当雷达副瓣对准模拟器时模拟器能正常工作的模拟器接收端的最优参数(接收机灵敏度、接收机天线增益),在实线Ⅱ1~Ⅱ5上选10个点,如表2所示。
表2 模拟器接收端的最优参数对应表
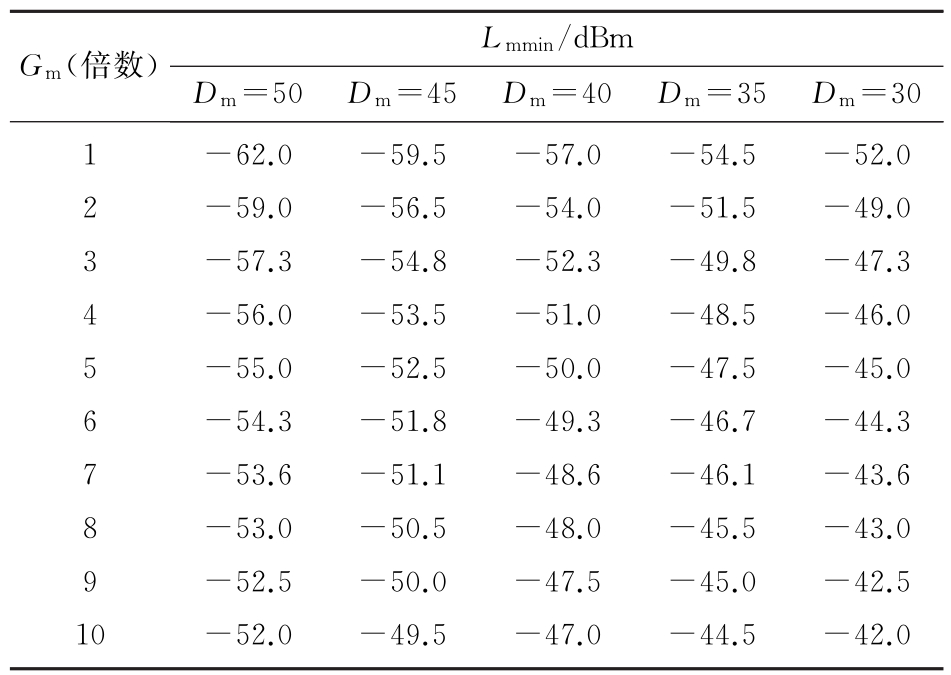
从表2可以看出,在模拟器接收机动态范围分别取50,45,40,35和30 dB时,当接收机天线增益在1~10之间变化时,接收机灵敏度在-42~62 dBm之间变化,这在工程上是很容易实现的。
4 结束语
本文提出的基于副瓣注入的多方位目标模拟方法能够解决应答式射频目标模拟器多方位多目标模拟的技术难题。理论分析表明,该方法的依据科学合理;仿真计算分析表明,该方法在工程上是容易实现的。对于不同频段的脉冲雷达,通过合理设计模拟器的技术参数,可以用一个模拟器模拟方位上相差几度到几十度的3个目标。将该方法应用到现代舰载防空武器系统拦截多目标的能力试验及作战部队演练中,军事经济效益将十分显著。该方法也可以推广应用到需要模拟雷达多方位多目标的应用场合。
参考文献:
[1]李兴民,王国田,李国君.战术导弹火控系统动态精度仿真试验方法研究[J].长春理工大学学报(自然科学版),2007,30(4):31-34.
[2]李国刚,梁浩,徐艳国.单通道副瓣影响分析及抑制方法[J].现代雷达,2015,37(2):5-7.
[3]奥列格V·西特尼科.伪随机序列调制信号的多普勒频移估计[J].雷达科学与技术,2014,12(2):117-122.SYTNIK O V.Doppler Shift Estimation of Signals Modulated by Pseudorandom Sequences[J].Radar Science and Technology,2014,12(2):117-122.
[4]王奕波,施海荣,赵伟.基于信号幅相特性的副瓣跟踪自动识别方法[J].电子与信息学报,2014,36(12):2975-2979.
[5]王星.航空电子对抗原理[M].北京:国防工业出版社,2008:199-200.
[6]丁鹭飞,耿富录,陈建春.雷达原理[M].5版.北京:电子工业出版社,2013:255.
