0 引言
群目标跟踪问题在近几年受到了国内外学者的广泛关注,它在地面或海面目标监控、多目标编队运动、人群或兽群跟踪等领域[1]有重要的应用价值。在大多数实际应用中,群目标不仅有相似的运动特性,又由于群内的个体目标较为密集,在很长时间内处于相互临近的状态。与此同时,受光学成像系统分辨率制约,群目标在像平面上形成的不再是点目标而是簇状像斑。在这种情况下视图对群内的所有个体进行跟踪显然是不现实的。此时可以对群整体进行跟踪。
根据这一思想,Koch等人提出了一种群目标Bayesian递推算法[2],可以跟踪群目标的质心状态,同时可以对群目标的形状进行估计。但是它目前仅用于跟踪无杂波条件下的单个群目标。Feldmann对群目标跟踪Bayesian算法进行了改进,考虑了量测不确定性对目标形状估计的影响[3-4]。但它也仅用于跟踪单个群目标。多个群目标的跟踪方法有两类:一类是将单个群目标的跟踪方法与传统关联算法相结合实现多个群目标的跟踪[5];另一类是基于随机有限集[6-8],递推的传递目标状态的分布信息,不需要数据关联即从目标状态分布中同时提取目标的个数和状态估计,但这类算法鲜有文献考虑群目标形状。
本文对群目标的Bayesian递推算法进行改进并用在多个群目标跟踪上。融合了量测集划分与群航迹起始、群航迹关联等算法,有效改进了多个群目标跟踪中形状估计误差大、精度低的问题。
1 传统群目标的Bayesian递推算法
如文献[3]中所示,将群目标看作一个整体,假设在k时刻群质心的运动状态向量为xk,其中![]() ,包括了位置、速度、加速度等空间维数。
,包括了位置、速度、加速度等空间维数。![]() 表示k时刻目标的位置,
表示k时刻目标的位置,![]() 表示k时刻目标的速度,
表示k时刻目标的速度,![]() 表示k时刻目标的加速度。
表示k时刻目标的加速度。
Bayesian递推算法用xk表示群质心的运动状态向量,并增加一个正定随机矩阵Xk来描述该群的形状特征,该方法将目标的形状用一个椭圆来近似,椭圆方程可以用二次型方程表示为
式中,xc为椭圆中心,正定矩阵Xk的特征值为椭圆各轴的长度,其所对应的特征向量为其椭圆各轴的方向向量。其性质完备地描述了空间或平面内一个椭圆的全部信息。
位置量测为
式中,Hk为量测矩阵,![]() 为量测噪声,是零均值的高斯白噪声,即
为量测噪声,是零均值的高斯白噪声,即![]() 为协方差矩阵。
为协方差矩阵。
假设量测集Zk为
式中,mk为k时刻量测值的个数。那么该群的累计量测集Zk={Z1,Z2,…,Zk}。
计算量测似然函数为
并且W(·)为Wishart分布,有如下形式:

式中:m>d;X为d维的对称正定随机矩阵,其期望为对称正定矩阵m C;etr(·)为exp(tr(·))的缩写。又由于
其中p(Xk|Zk)满足逆Wishart分布:
其中存在一个扩展参量vk|k,服从以下递推公式:
逆Wishart分布有如下形式:

拥有期望矩阵C/m-k-1,其中m-k-1>0。并且
所以状态更新公式为
形状扩展更新公式为
式中,Fk为状态转移矩阵,wk为过程噪声,是零均值的高斯白噪声,即wk~N(0,Qk)。那么,时间更新部分可以由下式给出:
式中,T代表了采样间隔,并存在未被限定的参量τ作为衰减因子常量,需要在实际跟踪中进行合理的设定。当τ=∞时,代表群目标的形状不发生变化。
2 改进的多个群目标跟踪算法
假设在一个监测区域中有N个群目标,在k时刻群质心的运动状态向量为![]() ,包括了位置、速度、加速度等空间维数。在杂波和漏检的情况下k时刻雷达获得的量测集为
,包括了位置、速度、加速度等空间维数。在杂波和漏检的情况下k时刻雷达获得的量测集为
式中,mk为k时刻的量测个数,包括了所有群的量测值与杂波。定义ZZk中第i个量测![]() 与第j个量测
与第j个量测![]() 在k时刻量测之间的距离为
在k时刻量测之间的距离为

选择某一阈值d0,若![]() ,则这两个量测属于同一个群,d0反映了群内目标的稠密程度。
,则这两个量测属于同一个群,d0反映了群内目标的稠密程度。
2.1 量测集划分与群航迹起始
将k时刻雷达获得的量测值根据量测之间距离划分为不同群[8],同时完成群的航迹起始。具体步骤如下:
1)选取某一测量点为中心,选择某一阈值d0以此点上建立波门;
2)对落入波门内的量测点重新以某一阈值建立波门,寻找新的落入波门内的量测;
3)重复第2)步,直到所建立的波门内没有量测为止,在此过程中所涉及的量测定义为一个群;
4)从不属于已经确定的量测中任意选取一个量测,重复以上3步直到最后一个量测。
这样就完成了对所有量测集的划分,航迹起始是首先起始成潜在航迹,等到有3个点更新时再起始成正式航迹(即输出航迹)。
2.2 群航迹关联
然后在所有的群建立完毕后对群测量的群航迹进行关联[9],具体步骤如下:
1)针对群中心的一步预测值建立跟踪波门
设![]() 为k时刻群航迹k的状态一步预测值,定义落入其确认波门中的量测必须满足:
为k时刻群航迹k的状态一步预测值,定义落入其确认波门中的量测必须满足:
式中,![]() 为量测
为量测![]() 相对群航迹t的量测一步预测值的新息,
相对群航迹t的量测一步预测值的新息,![]() 为归一化的距离
为归一化的距离![]() 为可允许的归一化距离的最大值,Sk为新息协方差阵。
为可允许的归一化距离的最大值,Sk为新息协方差阵。
2)以落入确认波门内的量测为基础建立新群
假设满足落入统计距离内的量测存在,从中选择归一化距离d2最小的量测作为一个群t的种子量测,并以该种子量测为基础建立群G0;验证满足落入统计距离内的其他量测,若量测满足所设定的某种有关种子测量的监控标准,如落入以种子量测为中心的一个椭圆波门内,量测就被暂时加入群G0;选取未落入群G0中的量测作为种子量测,重复上述步骤,直到没有量测,在所有的群建立完毕后,计算群中心和分布矩阵。
一个群的建立过程是一个在原有量测基础上不断向群中添加新量测的过程,所建立的群必须符合一定的规则,如:群中的任何一个量测必须满足相对于群中心和种子量测的两个距离标准;设定一个群中量测数目的上限,每个群量测个数不能超过该上限;若已知群在每个采样间隔内的距离变化范围,群中所有量测的距离变化都必须在该范围内。
若围绕种子量测建立新群时发现无法满足上述建立新群的规则,此时应该围绕下一个最近的量测建立新群,直到成功地建立起一个群或已没有可供选择的量测。
3)在所有的群建立完毕后对群测量的群航迹进行关联
关联过程中会遇到群量测该如何分配给群航迹的问题,解决这一问题最直接的方法是将群测量直接分配给产生种子量测的群航迹。假设群航迹t的确认波门中有多个群量测,群航迹t和所有的群测量都可能关联。计算群航迹t中心一步预测值和各个群测量中心的归一化距离,利用归一化距离解决关联问题。
2.3 滤波更新
传统群目标的Bayesian递推算法没有考虑传感器误差的影响,因此形状的估计受到量测误差的影响较大,对形状的估计效果较差。当传感器的量测误差无法忽略时,需要对算法进行调整。以下变量均针对某一个群展开论述。
对于每个群的状态演化方程依然用式(19)来描述,对群的量测模型作一下调整。对于该群的位置量测方程依然用式(2)描述。为了补偿传感器量测误差的影响,对式(2)中的量测噪声进行调整,调整后的量测噪声为
式中,λ为标量,用于描述Xk对量测的影响程度。假设该群的量测集Zk为
式中,nk为k时刻该群所关联上的量测值的个数。关联到该群的累计量测集Zk={Z1,Z2,…,Zk}。该群的量测似然函数[10]为

通过之前所述,群目标质心状态的估计与形状估计分开进行。考虑传感器误差对跟踪效果的影响,在传统群目标的Bayesian递推算法的基础上,主要对形状估计部分进行调整。
1)量测更新部分的改进
通过每个群已关联上的雷达量测数据对被跟踪目标的相关信息进行量测更新,依然独立考虑质心状态和形状矩阵的量测更新。
首先针对群目标质心状态的量测更新展开描述,群目标质心状态的量测更新和滤波器误差协方差量测更新矩阵为
式中,Kk|k-1由式(16)给出,新息协方差阵Sk|k-1的估计:
其中单个量测的预测协方差:
其次,针对群目标形状估计的量测更新展开描述,假设形状扩展状态的量测更新用Xk|k表示,时间更新用Xk|k-1表示,并假设Xk=Xk|k-1,结合式(18)中的Nk|k-1和式(6)中的¯Zk,Nk|k-1和¯Zk分别服从:

通过Cholesky分解计算矩阵Xk|k-1,Sk|k-1和Yk|k-1的均方根,Cholesky分解服从:
那么通过式(34)和式(35)得到
因此形状矩阵的更新可以表示为
式中,αk|k,αk|k-1为标量,随滤波算法进行预测与更新,其初始值根据经验值设定,αk|k的值为αk|k-1与群所关联上的量测个数之和,即
2)时间更新部分的改进
利用先前的信息对被跟踪目标下一时刻的信息进行估计。独立考虑质心运动状态演化与形状扩展部分,质心状态可通过卡尔曼滤波进行预测,质心的状态演化服从:
一步预测协方差为
式中,Qk为过程噪声协方差阵。
对于形状的预测,假设目标的形状在两个采样时刻没有发生变化,即
当αk|k>2时,参数αk|k-1的时间更新为
式中,存在参量τ作为衰减因子常量,需要在实际跟踪中进行合理的设定。
3 仿真环境及结果分析
仿真场景设置:假设在一个二维监控区域上有两个一字型编队匀速运动并在运动过程中正交于某一个交叉点而后分离,每个编队包含4个点目标,每两个点目标相距20 m,在雷达的一个扫描周期内,每个采样时刻都可以获得多个量测值,其中包括杂波和目标的真实量测值。
假设每个目标的检测概率为Pd=0.8,采样间隔T=2,仿真时长t_end=200,最大群内测量值数MAX_MEASURE_INGROUP=10,最大群组数MAX_GROUP=15,衰减因子τ=8,每个群形状矩阵的初始状态Group(i).XFlt=2 000∗eye(2),滤波器误差协方差矩阵的初始值Group(i).P=[2500 0 0 0;0 100 0 0;0 0 2500 0;0 0 0 100],参数α的初始值为Group(i).α=10。
利用群目标跟踪算法对两个编队进行跟踪,得到的目标的真实运动轨迹细节图如图1所示。
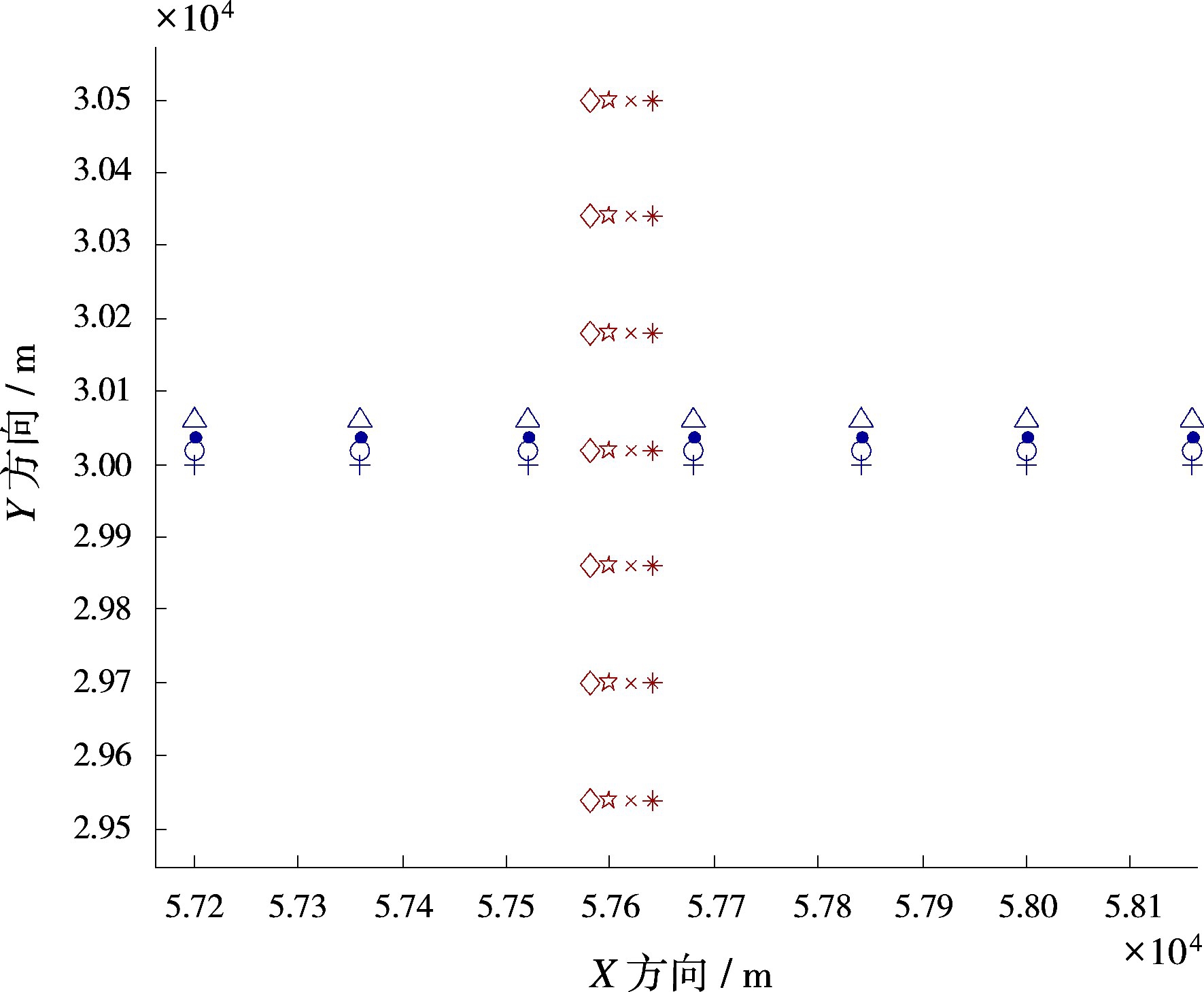
图1 目标真实轨迹细节图
在高斯白噪声的影响下,通过雷达周期性扫描获得每个目标的径向距离和方位角。首先将所有量测值进行划分,将量测分到两个群中,其次对每个群的测量值进行关联,最后对每个群目标的质心进行跟踪。在杂波环境中,目标的量测信息与跟踪信息如图2所示。

图2 极坐标下跟踪与测量信息
从图2可以看出,群整体跟踪效果较好,并且可以有效抵制杂波的干扰,达到稳定跟踪的目的。但在群跟踪过程中,由于杂波有可能进入跟踪波门内导致有误关联现象的存在,所以在跟踪过程中起始了一些错误的航迹。
在直角坐标系下,利用改进的多个群目标跟踪算法得到的跟踪轨迹与形状估计效果如图3所示,图中不仅显示出每个采样时刻群中心的位置,而且每个时刻用椭圆拟合出群目标的形状。
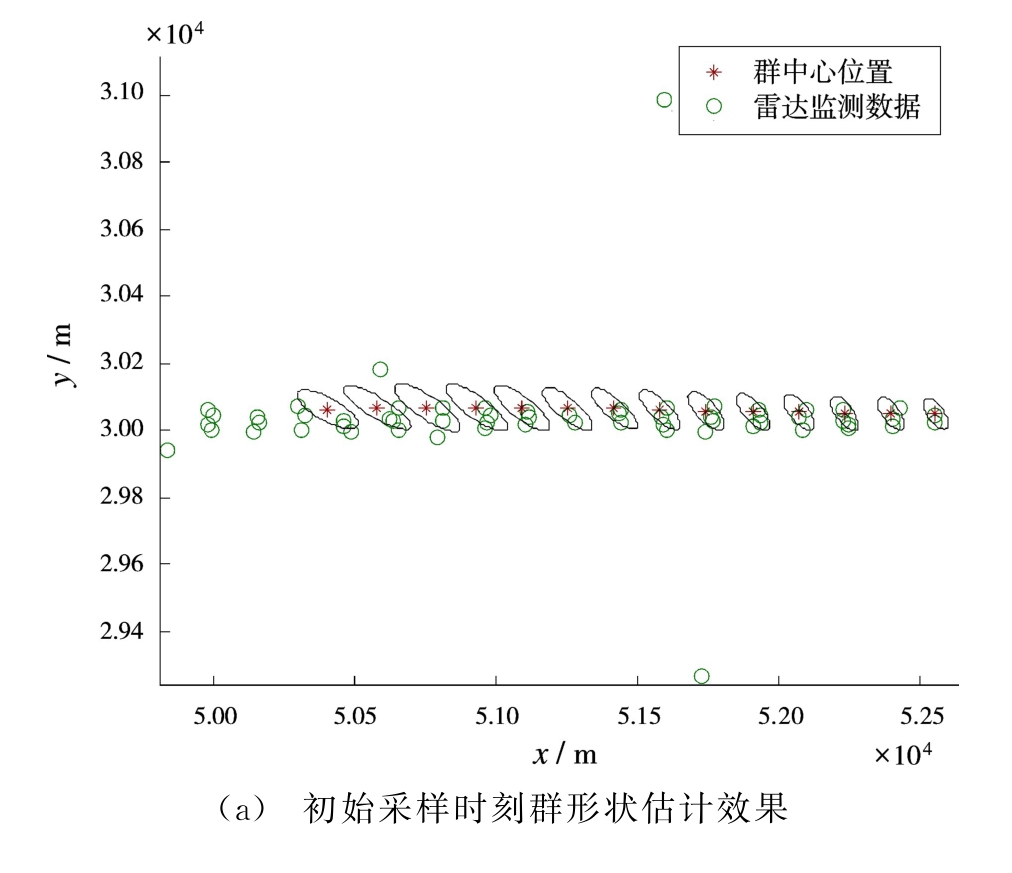
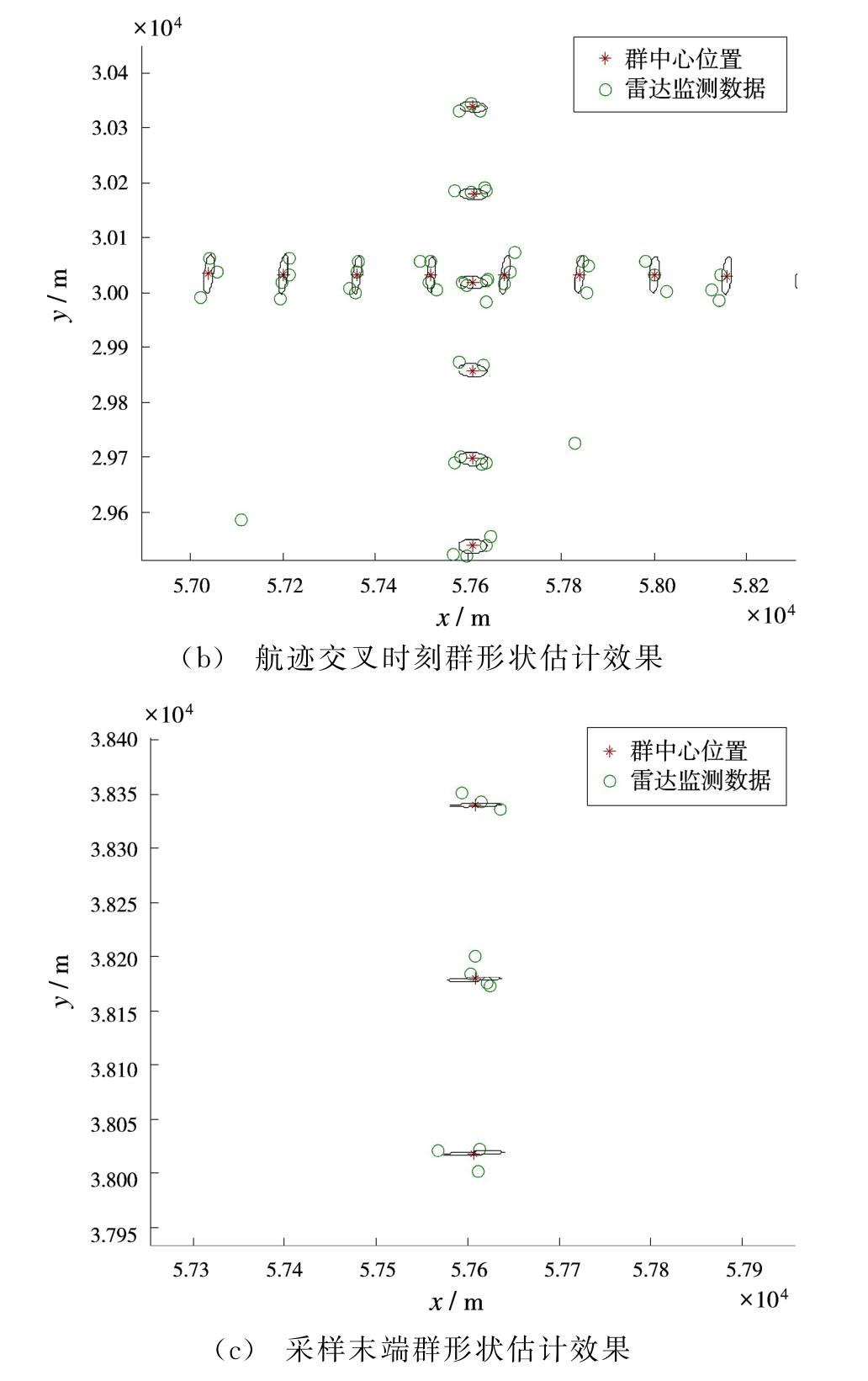
图3 群目标跟踪轨迹与形状估计
从图3可以看出,虽然形状初始值设为一个圆,但由于经过多帧筛选才能正式起始一条航迹,所以图中初始显示的群形状为一个椭圆。虽然在初始采样时刻群形状估计效果较差,但随着采样时间的增大,滤波算法不断对形状矩阵进行修正,形状估计能够有效抵制测量噪声的干扰,估计结果越来越接近一字形。为了定量衡量群目标跟踪效果,并在相同的仿真场景下,将传统的Bayesian群目标跟踪算法融合量测集划分、群航迹关联等算法。比较传统的Bayesian群目标跟踪算法和改进的跟踪算法的跟踪效果,图4、图5示出了状态跟踪误差曲线和形状估计误差曲线。
从图4、图5可以看出,改进的算法没有对状态跟踪产生影响,但对形状的估计更加精确,并且提高了形状估计的稳定性。采用传统的Bayesian群目标跟踪算法,形状估计的RMSE在40 m上下浮动,而采用改进的群目标跟踪算法形状估计的RMSE很快达到收敛,并且当形状估计达到稳定后,形状估计的RMSE接近于0。相比于传统的Bayesian群目标跟踪算法,采用改进的算法使得形状估计能够有效抵制测量噪声的干扰,形状估计精度得到了很大的改善。
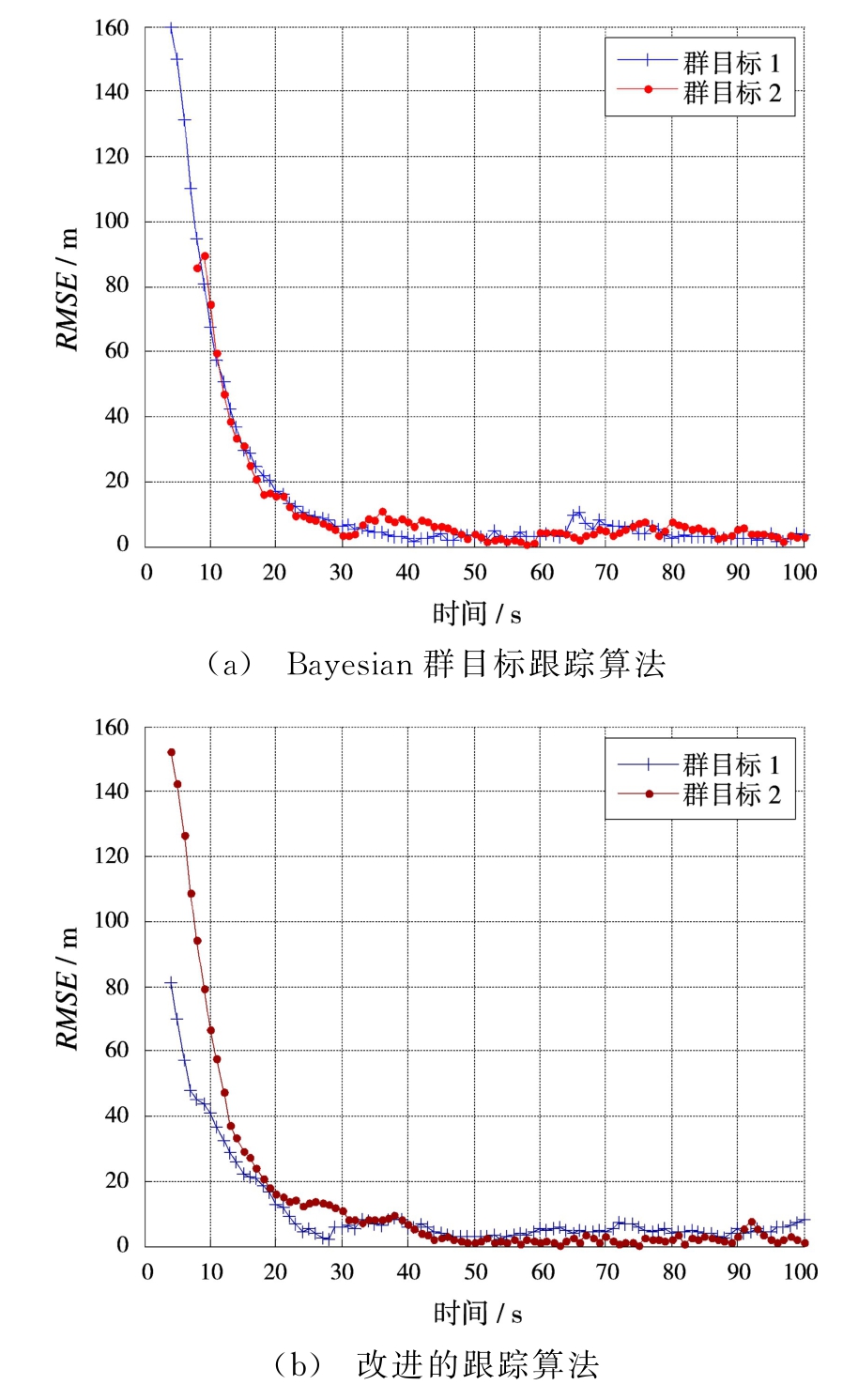
图4 状态跟踪误差

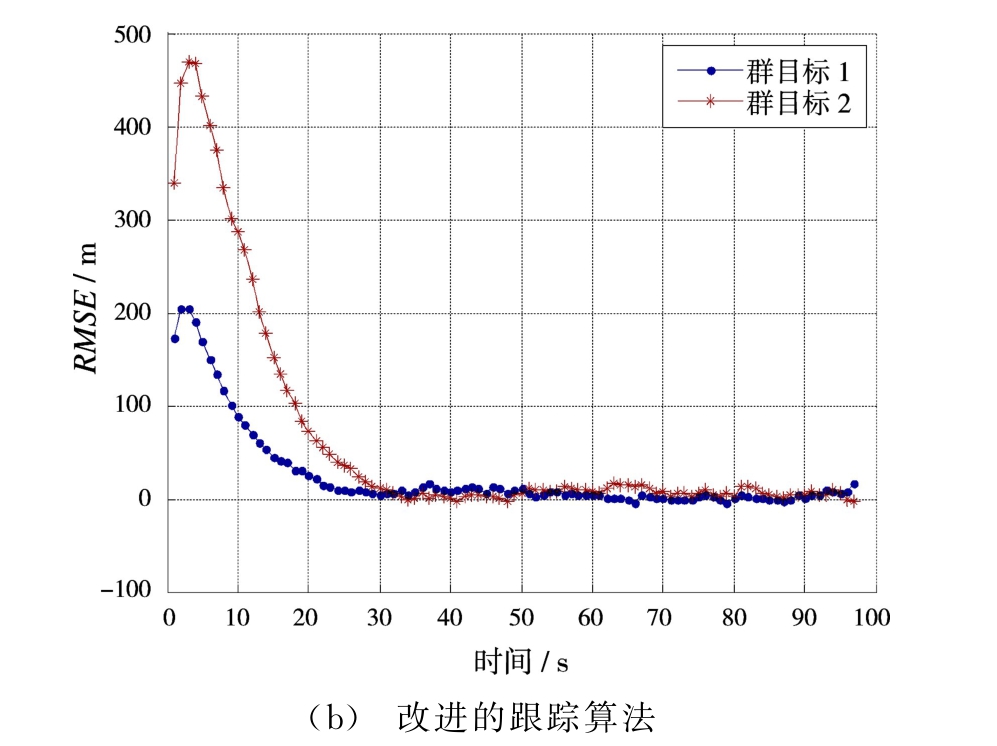
图5 形状估计误差
4 结束语
本文将传统Bayesian群目标跟踪算法进行改进,对多个群目标的运动状态和形状信息进行联合估计跟踪。该算法融合了量测集划分、群航迹起始,群航迹关联等算法,并考虑到了漏检和杂波对跟踪算法的影响。改进的算法能够有效抵制测量噪声的干扰,大大提高了群形状的估计精度。但本算法受到一定的限制,例如在实际应用中,雷达获得的量测值有强弱之分,对跟踪的影响也不同;在蜂群作战中,通常跟踪的目标是机动的情况。所以未来算法可以向这些方面改进,便于适应更为复杂的作战环境。
参考文献:
[1]连峰,王婷婷,韩崇昭.多个不可分辨目标群的联合检测与估计误差界[J].西安交通大学学报,2015,49(11):89-95.
[2]KOCH J W.Bayesian Approach to Extended Object and Cluster Tracking Using Random Matrices[J].IEEE Trans on Aerospace and Electronic Systems,2008,44(3):1042-1059.
[3]FELDMANN M,FRÄNKEN D.Tracking of Extended Objects and Group Targets Using Random Matrices:a New Approach[C]∥11th International Conference on Information Fusion,Cologne:IEEE,2008:1-8.
[4]FELDMANN M,FRÄNKEN D,KOCH W.Tracking of Extended Objects and Group Targets Using Random Matrices[J].IEEE Trans on Signal Processing,2011,59(4):1409-1420.
[5]BAUM M,NOACK B,HANEBECK U D.Mixture Random Hypersurface Models for Tracking Multiple Extended Objects[C]∥50th IEEE Conference on Decision and Control and European Control Conference,Orlando,FL:IEEE,2011:3166-3171.
[6]GRANSTROM K,LUNDQUIST C,ORGUNER U.Extended Target Tracking Using a Gaussian-Mixture PHD Filter[J].IEEE Trans on Aerospace and Electronic Systems,2012,48(4):3268-3286
[7]李文娟,顾红,苏卫民.基于多伯努利概率假设密度的扩展目标跟踪方法[J].电子与信息学报,2016,38(12):3114-3121.
[8]连峰,马冬冬,元向辉,等.扩展目标CBMe MBer滤波器及其高斯混合实现[J].控制与决策,2015,30(4):611-616.
[9]耿文东,王元钦,董正宏.群目标跟踪[M].北京:国防工业出版社,2014.
[10]韩玉兰,朱洪艳,韩崇昭.采用随机矩阵的多扩展目标滤波器[J].西安交通大学学报,2015,49(7):98-104.
