0 引言
随着雷达探测性能的不断提高,对雷达伺服系统的控制性能要求也不断提高,主要要求为控制精度、响应速度、鲁棒性、可靠性和稳定性等动态品质和性能。传统和改进PID控制器有以下4个方面的缺陷[1]:
1)对控制增益的变化太敏感;
2)“快速性”和“超调性”不可调和;
3)微分器很难选取;
4)误差积分常会使闭环的动态性能变差。
由此,传统的PID控制技术已难以满足雷达对伺服系统的品质要求。自抗扰控制[2]具有不依赖被控对象模型、无超调、响应速度快、鲁棒性强、有效解决快速性和超调性之间的矛盾等优点,引入自抗扰控制以提高雷达伺服系统动态和静态控制性能,但自抗扰控制器调节参数多且复杂。针对上述问题,设计线性自抗扰控制器,减少调节控制器参数,简化参数调节过程。最后,线性自抗扰控制器与PID控制在稳态精度、上升时间、超调量等方面进行数据对比,线性自抗扰控制明显优于PID控制,改善了雷达伺服系统的动态和静态性能。
1 雷达伺服系统组成及原理
在方位机扫、俯仰电扫雷达中,伺服系统接收载机的航向、横滚及爬升姿态信息,按指定的要求实现方位运动及计算俯仰电扫指向角,保证雷达天线方位轴指向稳定及俯仰轴保持水平[3-4]。伺服系统主要由控制模块、执行机构和反馈回路组成。控制模块以TMS320F28335芯片为核心,其主要功能是接收指令信息、姿态信息、反馈信号解码、坐标变换、控制运算等;执行机构由伺服功率驱动器、永磁直流力矩电机组成;反馈回路则由旋转变压器及RD芯片组成。伺服系统的控制原理如图1所示。
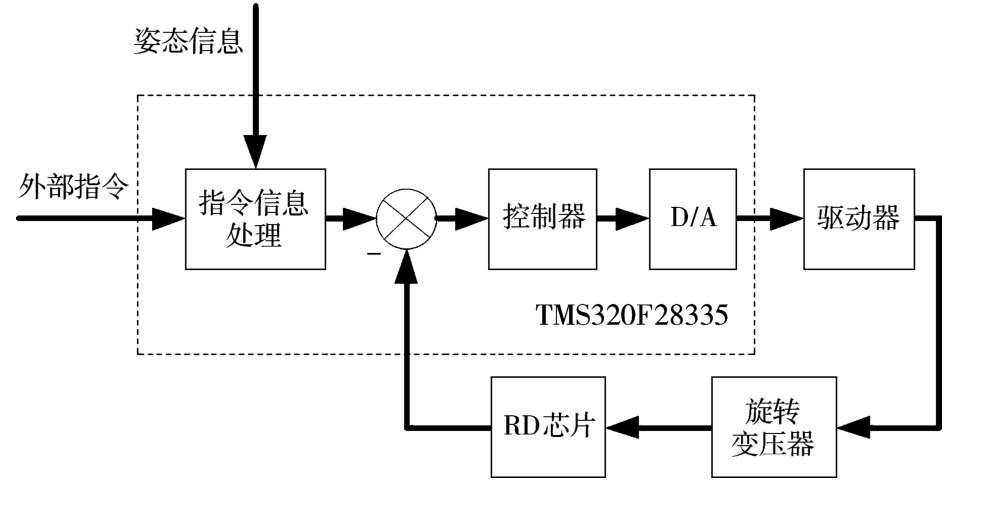
图1 伺服系统控制原理
2 自抗扰结构和控制算法
自抗扰控制器主要由3大部分组成[5]:跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)。雷达伺服系统采用直流力矩电机驱动[6],可以简化为二阶系统。二阶自抗扰控制器的结构如图2所示。
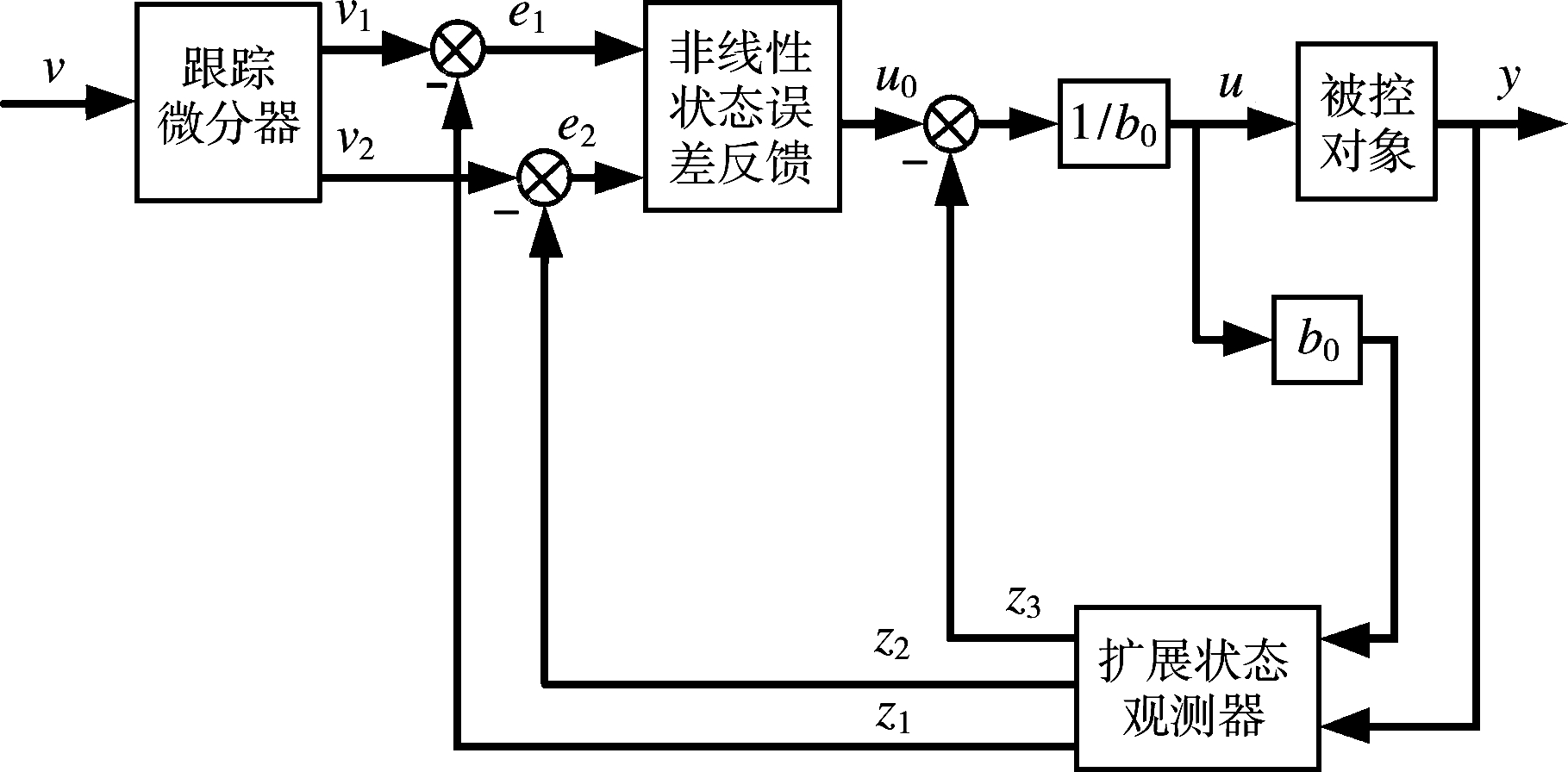
图2 二阶自抗扰控制器结构图
对于二阶被控对象[7]:
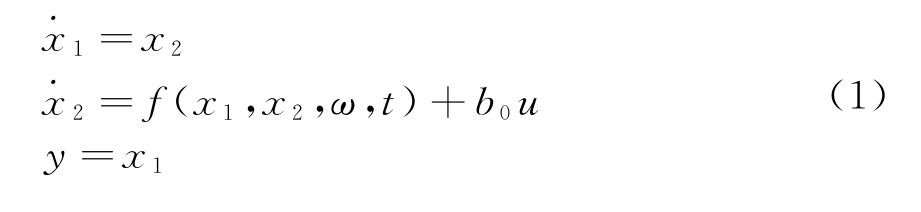
式中,x1,x2为系统状态变量,y为系统输出,f(x1,x2,ω,t)为对象扰动总和作用量,b0为控制系数。
二阶ADRC方程为
式中:v1,v2分别为输入信号v的跟踪信号及其微分;ε(t)为跟踪信号v1与输入变量v的误差;M为速度因子,主要影响跟踪速度;h为滤波因子,主要影响滤波效果。
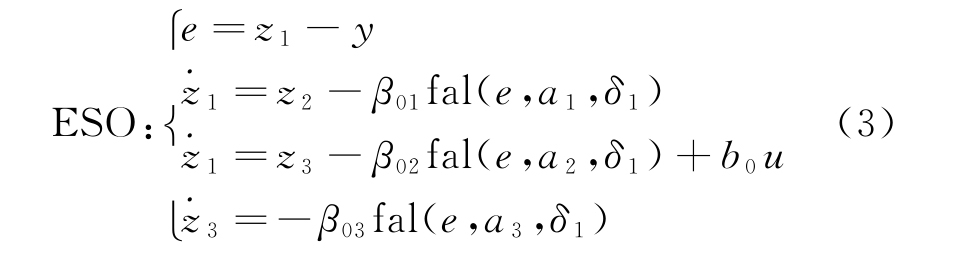
式中:z1,z2分别为v1和v2的观测值;z3为式(1)中f(x1,x2,ω,t)和其他可能出现扰动观测值。
其中,式(2)中函数定义如式(6)、式(7)所示;式(3)、式(4)中函数定义如式(8)所示。
由式(2)、式(3)和式(4)可知,自抗扰控制器调节参数包括TD的[M,h]、ESO的[a1,a2,a3,δ1,β01,β02,β03,b0]、NLSEF 的 [a4,a5,δ,β1,β2]。确定这些参数是一项繁杂的过程,且依靠经验,不利于广泛应用。
3 线性自抗扰控制(LADRC)
自抗扰控制方法基本思想是利用一个扩张状态观测器来估计未知的广义扰动[8]。对于式(1),令
设f(x1,x2,ω,t)可微且![]() ,则式(1)可表示为
,则式(1)可表示为
式中,x=[x1,x2,x3]T为系统状态变量,y为系统输出。
对式(10)设计全维状态观测器:
式中,z=[z1,z2,z3]T为x=[x1,x2,x3]T观测值,H矩阵为
若式(10)中(A,B,C)可观测,则状态估值z可逼近对象实际状态x,逼近速率由矩阵(A-HC)配置极点决定。配置观测器的带宽为ω0,则

令线性自抗扰的控制量为
将式(15)、式(16)代入式(10),得出原系统可表示为
令状态误差反馈控制量为
由式(17)和式(18)可知,系统的闭环函数为
取闭环系统的带宽为ωc,则
由式(19)可知,系统闭环传递函数为二阶系统,0<ξ<1时,系统为欠阻尼,ξ>1时,系统为过阻尼。为使闭环系统无超调,一般选取ξ>1。
由上述可知,线性自抗扰控制器在TD部分和控制系数b0,与自抗扰控制器的参数数量相同;而在ESO部分,线性自抗扰控制器只需设计极点配置参数ω0;NLSEF部分,只需设计整个闭环系统带宽ωc,间接求出状态反馈增益[k1,k2],其中ω0与ωc符合ω0=3~5ωc。因此,线性自抗扰控制器大大简化了调节参数的数量,使得工程调试复杂度大大降低。
4 仿真实例
雷达伺服系统方位电机参数:电阻Rm=3.7Ω,电感Lm=8.8 m H,转矩系数Km=2.63 N·m/A,反电势系数Ke=2.58 V/(rad·s-1),电机转动惯量Jm=0.013 5 kg·m2,负载转动惯量Jt=3.02 kg·m2。DA输出[-10,10]V,功率驱动模块母线电压48 V。
LADRC控制参数:TD参数M=200和h=0.04,选择ω0=300,ωc=100,ξ=1.25和b0=150,则NLSEF参数k1=10 000,k2=250,ESO参数H=[900,270 000,27 000 000]T。
PID参数:采用综合法即2-1-2法校正,控制器形式为PI+超前滞后校正。为优先满足雷达快速响应要求,尽可能减少系统超调量,取一组较好调试参数为KP=0.9,KI=4.5,超前环节T1=0.3,滞后环节T2=0.014。
LADRC和PID控制对单位阶跃响应特性曲线如图3所示。由图3可知,PID控制器调节时间为0.54 s,超调约23.2%;相较于PID控制器,LADRC调节时间0.23 s,无超调。
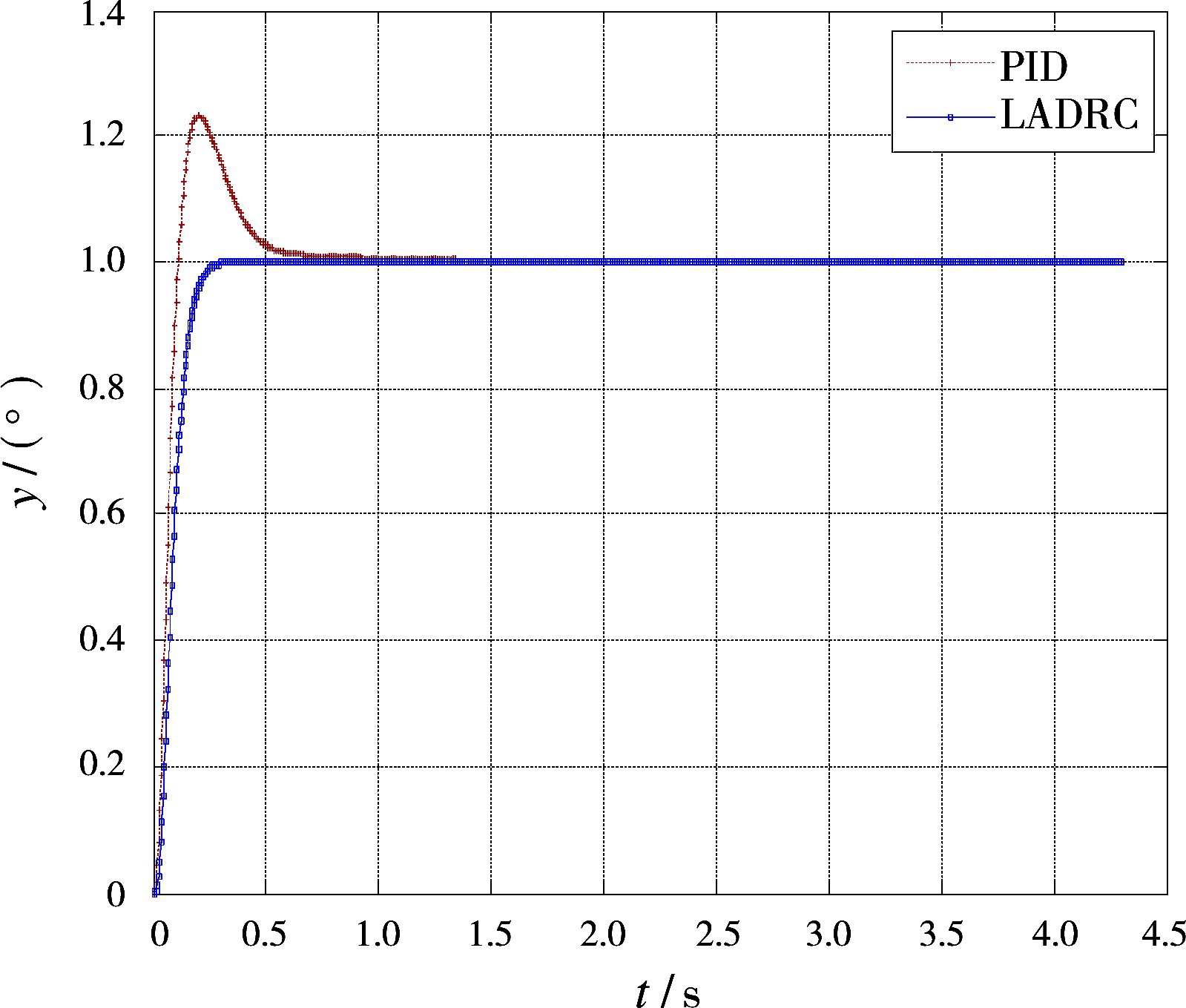
图3 PID和LADRC控制单位阶跃响应曲线
为验证雷达伺服系统对负载变化的鲁棒性,令初始时刻负载转矩为0 N·m,负载转矩在1.5 s时变为3 N·m,在3 s时变为0 N·m,得到PID和LADRC控制曲线如图4所示。由图4可知,PID控制在负载转矩突变时,调节时间超过1.5 s,角度出现0.36°跳变。而LADRC在负载转矩突变时,调节时间仅仅0.05 s,角度出现0.088°的轻微变动,具有良好的抗干扰性和鲁棒性。明显优于PID控制。

图4 负载变化PID和LADRC控制曲线
雷达伺服系统在不同目标区间需要大角度切换,实现对特定区域的探测。当输入角度阶跃90°时,PID和LADRC控制器输出的响应曲线如图5所示。由图5可知,由于存在积分环节,在大范围阶跃时,短时间内系统输出有很大偏差,造成PID运算的积分积累,引起系统振荡发散,系统不稳定。而LADRC仍能很好地控制系统,并有较快的速度到指定的目标区域。因此,LADRC的稳定性比传统的PID好。
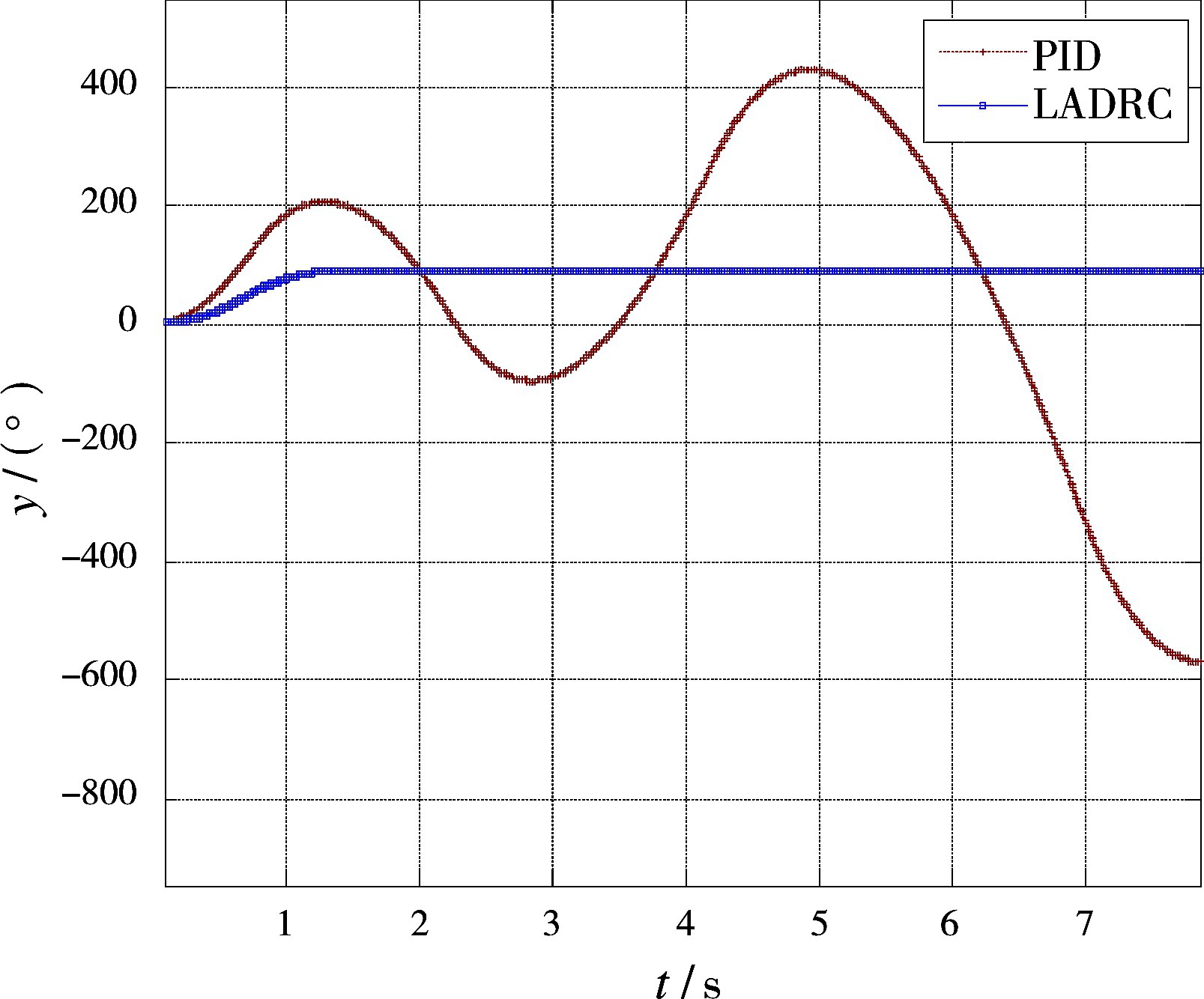
图5 大角度阶跃PID和LADRC阶跃响应曲线
5 结束语
自抗扰控制算法(ADRC)继承传统PID算法不依赖对象模型的优点,克服了对控制增益敏感、“快速性”和“超调性”不可调和以及微分很难选取的缺点。而线性自抗扰控制算法(LADRC)解决了自抗扰控制算法调节参数多且复杂、不利于实际应用的问题。仿真和实践表明,线性自抗扰控制算法大大提高了雷达伺服系统的控制性能,使伺服系统具有响应速度快、调节时间短、无超调、鲁棒性强、稳定性好等优点。
参考文献:
[1]韩京清.自抗扰控制技术[J].前沿科学,2007(1):24-31.
[2]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[3]李凤俐.时间最优控制理论在雷达伺服系统中的应用[J].测控技术,2008,27(6):47-49.
[4]刘亚云,金亮亮.一种改进的时间最优控制算法[J].雷达科学与技术,2014,12(2):210-213.
[5]唐茂华,吴鹏.基于自抗扰的非最小相位伺服系统控制[J].雷达科学与技术,2013,11(3):335-340.
[6]龙满林,付永领,李光华,等.自抗扰算法在直流力矩电机伺服系统中的应用[J].中国机械工程,2012,23(9):1047-1050.
[7]纪恩庆,肖维荣.二阶自抗扰控制器的参数简化[J].自动化仪表,2007,28(5):27-28.
[8]周宏,谭文.线性自抗扰控制的抗饱和补偿措施[J].控制理论与应用,2014,31(11):1457-1463.


