0 引言
波束控制系统作为相控阵雷达的重要组成之一,实时计算雷达阵面所有组件相位和控制驱动,产生组件工作控制时序,从而完成天线波束的快速扫描,实现目标搜索和跟踪[1]。另一方面,现代雷达波控系统的功能已不局限于波束扫描的完成,波束控制已从单纯的波束指向控制变为相控阵天线系统的综合控制网络,可实现对雷达阵面健康状态实时监控。波束控制系统的关键器件为波束控制主处理芯片,它是实现相控阵雷达单元控制和波束计算的核心部分。
主处理芯片接收到包含通信方向的控制信号后,根据控制软件提供的算法计算出各个移相器的相移量,然后通过天线控制器来控制馈电网络完成移相过程[2]。由于移相器能够补偿同一信号到达各个不同阵元而产生的时间差,所以此时天线阵的输出同相叠加达到最大。一旦信号方向发生变化,只要通过调整移相器的相移量就可使天线阵波束的最大指向作相应的变化,从而实现波束扫描和跟踪[3]。
FPGA作为雷达波束控制核心器件,利用其丰富的逻辑单元和I/O管脚、可重复编程和配置功能、高速CMOS工艺、功耗低、与CMOS和TTL电平兼容等特点,将波控码值运算、控制、多接口配置、系统检测等集成在一片芯片中处理完成,简化了波控电路设计,降低了系统成本,提高了系统可靠性。同时,FPGA也是设计周期最短、开发费用最低、风险最小的器件之一[4]。
1 相控阵天线波束扫描原理
相控阵雷达天线需要对不同指向的波瓣进行测量,即根据波束指向角计算出阵列中每个移相器的馈相值,在间距N×M个组件的二维相控阵天线中,如果对组件进行逐一布相需要N×M次布相方式,无法兼顾系统对布相速度的要求,为此,对于N×M个单元的相控阵天线,采用二维分离N+M次布相方式,布相的次数仅为k×(N+M),与逐一布相的k×N×M次相比,布相时间将有较大的降低,是实现快速二维相控阵布相的有效途径。
如图1所示,在一个N行M列的相控阵天线中,若取阵面左下角为坐标原点,当要求波束指向为θB,φB(分别对应俯仰角和方位角)时,第n行、第m列的馈相值:
图1 二维相控阵天线的单元排列示意图
雷达波束调度或数据处理系统根据θB,φB(方位角、俯仰角)计算出指向系数α,β。指向角θB,φB转换成α,β码的计算公式[5]:
式中,dx,dy为相邻天线单元的间距在水平和垂直方向的距离,λ为波长。通过简化得出波控码值的运算公式:
式中,乘法为浮点运算,m,n为移相单元的坐标,ϕf为移相器修正值。
雷达上位机计算转换后的指向系数α,β,量化后通过异步串口传输到波控系统,FPGA首先计算出坐标系原点的实时码值,因为组件横坐标和纵坐标都是等间距的,通过加法逐一计算出其余组件的实时码值,然后将存储器中校正参数叠加到对应的组件,计算出阵列中每个移相器单元所需的控制码值[6],产生波束控制时序信号驱动移相器,实现波束指向指定的空域,具体波束形成基本算法如图2所示。
图2 波束形成基本算法框图
2 非矩形式天线阵面布局方式
非矩形天线阵面排列形式如图3所示,前一列的节点位于后一列两节点中间位置,因此,在节点的中间位置插入一个虚拟节点,可以形成一个规则矩形,然后按照上述加法迭代方式完成雷达的快速布相。
图3 二维相控阵圆形天线的单元排列示意图
矩形化虚拟节点插值方式如图4所示,插入虚拟节点后的阵面形成了规则的矩形结构,白色圆圈代表虚拟节点,黑色圆圈代表实际节点。通过示意图可以看出,变换后的节点水平距离不变,垂直距离为实际距离的一半。
3 工程实现
图4 虚拟插值示意图
波束控制系统主要包括波控主处理芯片(FPGA)、接口芯片、校正码值存储器、驱动控制芯片及相应控制软件,如图5所示。波控主处理芯片是整个单元的核心芯片,完成码值计算、时序产生及控制等任务,存储芯片保存组件的校正参数。布相时,波控芯片读取存储芯片中的校正参数,叠加到对应单元的码值,根据雷达工作模式产生相应控制时序,并通过驱动器驱动移相器,完成阵面快速布相。
根据图3所示的改进后相邻天线单元的虚拟插值得出:dx=d1,dy=d2/2,将此参数代入式(2)中,α′=2π(d2/2)cosθBsinφB/λ=α/2;β′=β,得出改进后的波控码依然为线性关系,因此,仍然可以采用加法迭代方式完成波控码值的计算。波束调度计算机将计算好的指向系数α,β经过量化后与工作模式一并通过异步串口送入到波控单元,根据式(3)中mα′和nβ′都是乘法运算,FPGA不支持浮点运算,并行的加法运算具有优势,因此,将mα′和nβ′的计算按照矩形架构的方式采用加法完成,较大地节省了系统布相时间。
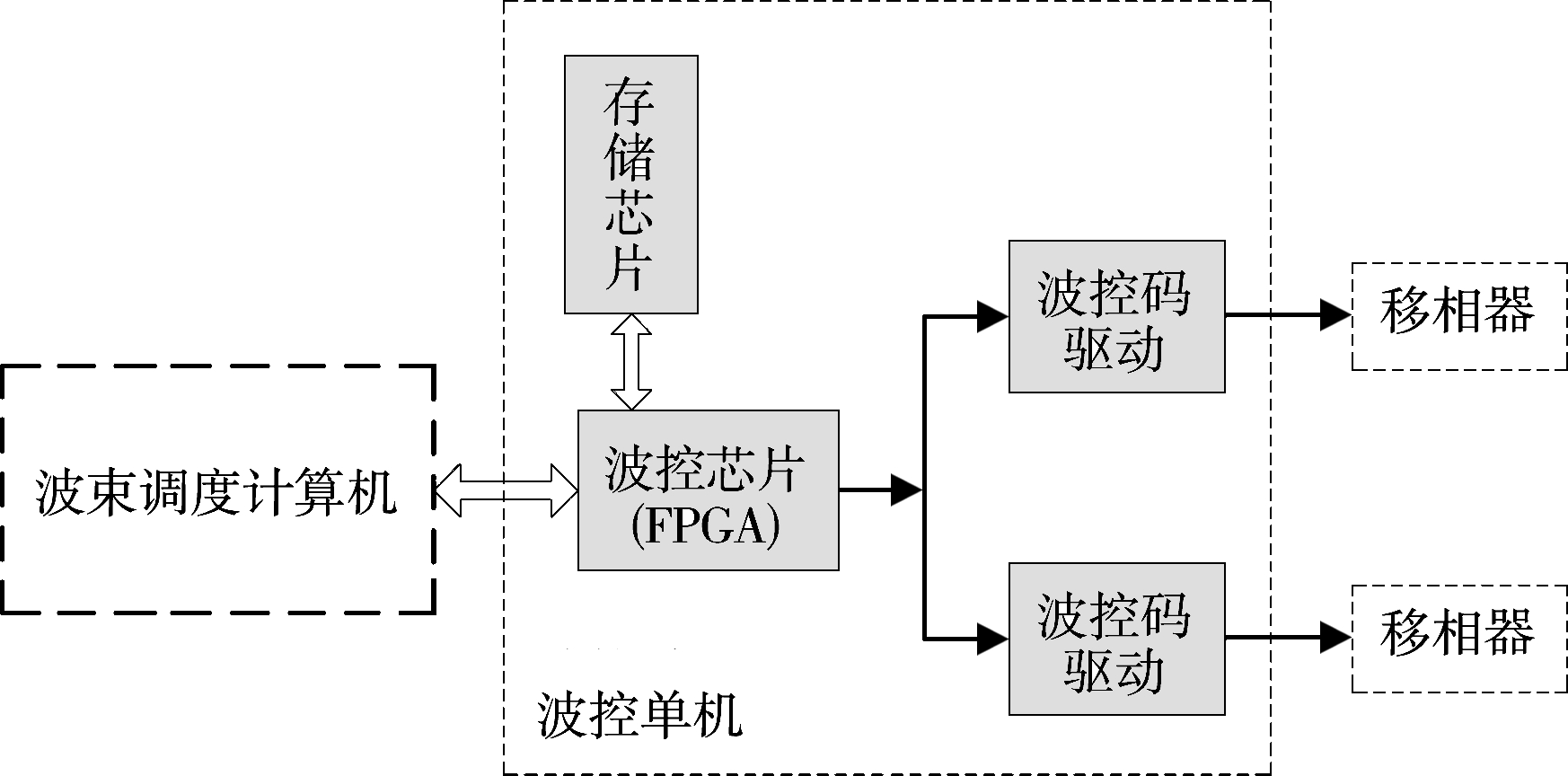
图5 波束控制系统组成
完成所有节点的累加后,将插入的虚拟节点剔除掉,通过加法得出实际节点的波控码值,具体程序构架如图6所示。同时,读出存储器中雷达组件的校正参数,然后叠加到对应组件的实时码值,计算出阵列中每个移相器单元所需的控制码值。仿真结果如图7所示。

图6 加法迭代构架
4 结束语
本文简述了基于FPGA的相控阵雷达波束控制原理,首先介绍了矩形相控阵雷达天线波控设计模型及计算方式,并结合实际的工程设计,分析了非矩形相控阵天线的结构形式及对应参数的分布规律,提出了采用虚拟插值方式,在合适的位置进行虚拟节点补充,将非规则矩形结构形式转换成规则的矩形形式;然后,按照矩形相控阵码值计算方式得出所有的节点控制码值,同时将虚拟节点的控制码值剔除掉,按照波控时序驱动移相器,实现相控阵雷达天线波束快速扫描。FPGA作为波束控制系统的核心部件,相比CPU处理器实现的波束控制系统,具有低功耗和高可靠等优点,已应用于多型相控阵雷达天线波束控制设计,该设计方法对相控阵雷达波束控制技术的发展具有一定的推动作用[7]。

图7 仿真结果
参考文献:
[1]张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2006:172-181.
[2]万东成.相控阵天线阵面测试平台的设计与实现[D].南京:东南大学,2016:12-14.
[3]车明阳,于林韬,朱建东.浅谈基于FPGA的相控阵雷达波束控制系统设计[J].信息通信,2013(8):56-58.
[4]殷卫真.基于FPGA的电子系统设计[M].西安:西安交通大学出版社,2016:21-23.
[5]赵婧.小型机载高集成波控系统设计[J].兵器装备工程学报,2017,38(1):116-118.
[6]许大进,李琳,宣浩.一种机载相控阵雷达波控系统设计[J].雷达科学与技术,2015,13(6):572-576.
[7]田可,周继.基于FPGA的波控系统设计与实现[J].应用科技,2008,35(3):1-3.
