0 引言
本文讨论的探测对象是飞行速度慢、RCS小的目标,简称“慢速小目标”(Slow and Small Target,SST)。由于SST常常受到地物杂波干扰,加之雷达散射截面积小,导致地面雷达对其探测不连续,难以实现有效的探测[1-5]。
地面雷达在多帧扫描中存在着部分帧能检测到SST,由于相邻帧之间目标检测不连续,最终无法发现目标。帧间积累虽然能增大SST积累区域,提高地面雷达对SST 的发现概率,但当SST相邻积累回波不连通时,帧间积累无法增大SST积累回波,但会在屏幕上形成一条相邻积累回波不连通的SST积累区域,这类SST夹杂在大量慢动杂波之中,导致地面雷达最终无法发现SST。由于SST运动方向相对一定,而慢动杂波运动相对随机,因此帧间积累SST直线特性要好于慢动杂波,通过对积累回波直线特性检测可以极大地提高地面雷达对SST的探测能力。目前国内直线特性的检测方法有很多,其中以Hough变换法及其改进算法最为典型。文献[6]提出一种基于修正随机Hough变换的快速航迹起始方法,在密集杂波环境下,通过特征点合并的自适应方法,提高了目标航迹起始的实时性。文献[7]提出一种基于改进积累方式的Hough变换和最小方差航迹起始方法,通过控制积累时间和判别航迹最小方差,提高了真实目标航迹起始能力。文献[8]提出一种基于随机Hough变换的航迹起始算法,通过序列检测技术确定新的采样终止规则,提高真实目标航迹起始概率。以上文献中所提及的Hough变换法及其改进算法,针对常规目标时,能一定程度提高目标航迹的提取能力,但对SST没有很好的航迹提取效果。
因此,本文基于Hough变换提出了一种帧间积累相邻回波不连通的慢速小目标航迹提取方法,使用图像处理技术提取目标积累区域像素值、占空比和长宽比,根据占空比和长宽比对目标积累区域进行分类处理,在每个分类域中利用像素值、占空比和长宽比对标准Hough变换投票权值进行改进,最终实现对SST航迹的有效提取。
1 目标积累特性研究
在帧间积累的SST图像中,往往会存在很多与SST具有相同目标特性和运动特性的杂波。这些杂波和SST都具有较慢运动速度且像素值不大,因此通过帧间积累会集聚于同一个位置或周围的像素点上,如图1所示。
杂波运动是随机的,因此帧间积累目标方向是不定的。SST具有一定飞行轨迹,因此帧间积累中目标会按照一定方向进行累积。在同一位置或相邻位置区域,当杂波和SST出现次数较少或运动较慢时,杂波和SST相邻积累回波将出现不连通的现象,如图1(a)和图1(b)所示。以上是SST和杂波相互独立积累的情况,在同一积累区域内,如果杂波和SST相交出现,积累区域长度将会大于杂波积累区域而小于SST积累区域。本文处理的是送往雷达显示终端的0/1信号,出现1表示存在目标,出现0表示不存在目标,当杂波和SST相交出现时无法对目标类型进行区分。因此应该有效控制积累时间,减小目标积累区域间的相交,这是提高本文算法精度的一个有效途径。
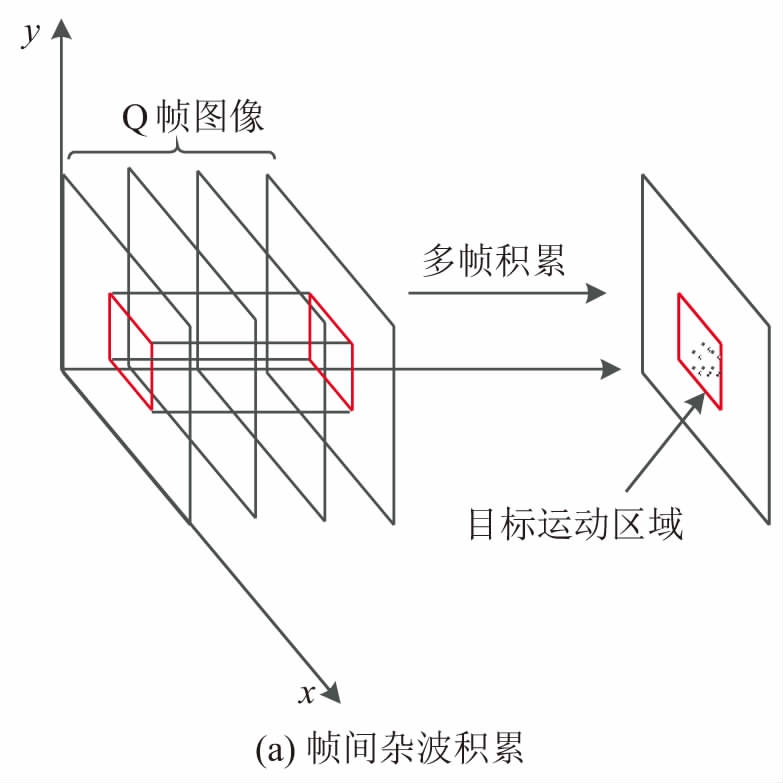
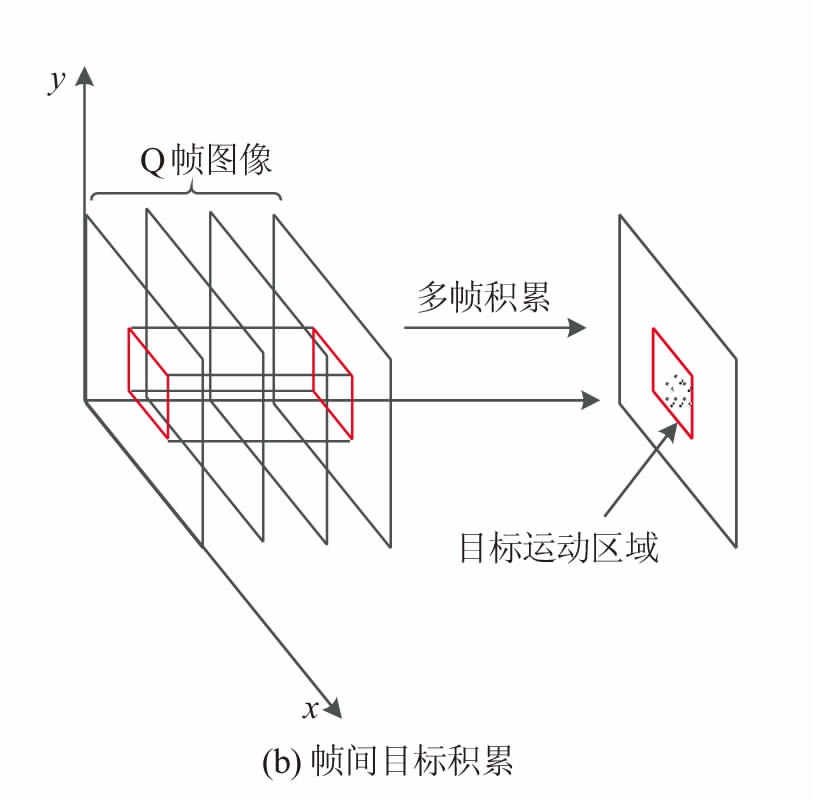
图1 目标和杂波积累图
2 积累回波航迹检测
由于本文处理的是多帧积累后相邻积累回波不连通的SST,因此在多帧积累图像中SST回波像素值很小。滤波处理虽然能去除那些大片连通的慢动杂波,但对像素值不大且与SST极其相似的慢动杂波依然无法滤除。由于多帧积累SST回波直线特性远好于慢动杂波,因此通过对积累回波直线特性检测可以进一步缩小SST出现的范围,提高地面雷达对SST的探测能力。标准Hough变换[9-13]航迹提取时权值都会为1,当SST回波像素值小于慢动杂波时,慢动杂波航迹提取的概率将大于SST,为此通过分类处理把具有相同积累属性目标回波分到同一个域中,然后根据所提取目标回波的像素值、占空比和长宽比来改进Hough变换的权值,提高SST航迹提取能力。在同一目标分类域中,目标回波占空比和长宽比的值越大,该目标回波是SST的概率也就越大,在Hough变换时该目标回波权值也就越大,最终被有效航迹提取概率也就越来越大。
2.1 积累回波特征值提取
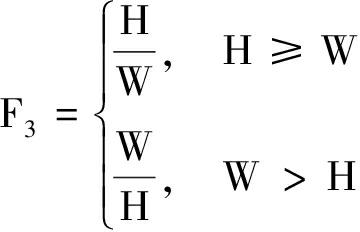
当SST和杂波相邻积累回波不连通且相互间不存在相交时,运用图像标记技术对多帧积累滤波处理的图像进行标记,提取目标回波面积F1、占空比F2和长宽比F3,F1为目标回波像素值个数,占空比F2和长宽比F3的定义如下:
(1)
(2)
式中,S为目标回波最小外接矩形的面积,H,W分别为目标回波最小外接矩形的长和宽。目标积累区域最小外接矩形的长和宽主要是通过图像标记技术提取出目标积累区域所在矩阵中最大的行和列来进行确定。
2.2 积累回波分类
积累回波占空比和长宽比是目标积累回波的描述向量,同一目标相邻积累回波占空比和长宽比都极其相似。根据积累回波占空比和长宽比,把具有相似目标特性的SST分到一起,可以有效减小目标回波间相互干扰。信息熵[14-15]是描述向量的常用手段之一,本节使用的信息熵由占空比和长宽比设计得到。
在K×M的Q帧SST积累图像C(xkm,ykm)中,目标积累回波图像熵值表达式为
(3)
式中,H(A)为积累回波熵值,k=1,2,…,K,m=1,2,…,M。由于无法确定相邻积累回波不连通SST的目标特性,因此SST的H(A)分类范围也是随机的。当H(A)≠0时,选择适当ΔH(A)对目标积累回波进行分类,ΔH(A)越小,目标积累回波的分类效果越精确;在同一SST分类区域内,目标回波的H(A)越大,则该目标回波是SST的可能性也就越大。
2.3 加权Hough变换
根据2.2节的H(A)对目标积累回波进行分类处理,在同一分类域中,利用Hough变换对目标回波进行投票提取。投票权值由目标回波的像素值F1、占空比F2和长宽比F3组成,以熵值作为衡量投票权值大小的标准[14]。积累回波熵值越大,Hough变换投票的权值也就越大,该目标回波是SST的可能性也就越大。反之,则该目标回波是慢动杂波的可能性比较大。
在K×M的Q帧SST航迹图像C(xkm,ykm)中,积累回波权值表达式为
(4)
式中,w为目标回波投票权值。加权Hough变换的主要运算步骤如下:
步骤1:读入Q帧K×M的图像信息C(xkm,ykm),用图像技术标记积累回波记目标回波个数为O,计算O个积累回波最小外接矩形的像素值F1h、占空比F2h、长宽比F3h,h=1,2,…,O;
步骤2:判断积累回波最小外接矩形的像素值F1h大小,如果F1h<c转至步骤3,否则h=h+1,c为所设定像素值滤波门限;
步骤3:通过式(3)求解出O个积累回波最小外接矩形熵值H(Ah),根据H(Ah)对积累回波进行分类处理,通过仿真分析本组实测数据可知,SST主要分布于1<H(Ah)≤2的区域,把1<H(Ah)≤1.33积累回波分到W1,把1.33<H(Ah)≤1.67积累回波分到W2,把1.67<H(Ah)≤2积累回波分到W3;
步骤4:从W1获取C(x1km,y1km)数据(x1km,y1km),并通过式(4)计算出O1个目标回波投票权值wj,j=1,2,…,O1,O1为W1目标回波个数;从W2获取C(x2km,y2km)数据(x2km,y2km),并通过式(4)计算出O2个目标回波投票权值wi,i=1,2,…,O2,O2为W2目标回波个数;从W3获取C(x3km,y3km)数据(x3km,y3km),并通过式(4)计算出O3个目标回波投票权值wk,k=1,2,…,O3,O3为W3目标回波个数;
步骤5:把角度值θ按一定量化间隔Δθ离散为P份,离散取值为θl,l=1,2,…,P,通过ρ1∂f=x1kmcosθ∂+y1kmsinθ∂,将所有ρ1∂f存储于矩阵H1中,通过ρ2∂f=x2kmcosθ∂+y2kmsinθ∂,将所有ρ2∂f存储于矩阵H2中,通过ρ3∂f=x3kmcosθ∂+y3kmsinθ∂,将所有ρ3∂f存储于矩阵H3中;
步骤6:把直线到原点距离ρ按一定量化间隔Δρ离散为E份,离散取值为ρe,e=1,2,…,E,根据离散Δθ和Δρ定义投票矩阵U(P,E),并设置其中各个元素初值为0;
步骤7:考察矩阵H1中所有元素ρ1∂f是否对积累单元U(∂,f)投票,若投票,则U(∂,f)=U(∂,f)+wj,否则U(∂,f)=U(∂,f);考察矩阵H2中所有元素ρ2∂f是否对积累单元U(∂,f)投票,若投票,则U(∂,f)=U(∂,f)+wi,否则U(∂,f)=U(∂,f);考察矩阵H3中所有元素ρ3∂f是否对积累单元U(∂,f)投票,若投票,则U(∂,f)=U(∂,f)+wk,否则U(∂,f)=U(∂,f);
步骤8:计算出积累峰值最大值cmax,设定投票矩阵的阈值c0=x·cmax,0≤x≤1,提取出满足阈值c0的积累单元U(θpeak,ρpeak),当满足U(θpeak,ρpeak)条件回波个数大于或等于3时,确定目标积累区域为SST航迹。
3 仿真分析
为了验证所提出算法的有效性,截取送往雷达显示终端的4 min 40 s共28帧图片信息,多帧积累后得到如图2所示的多帧积累图像。
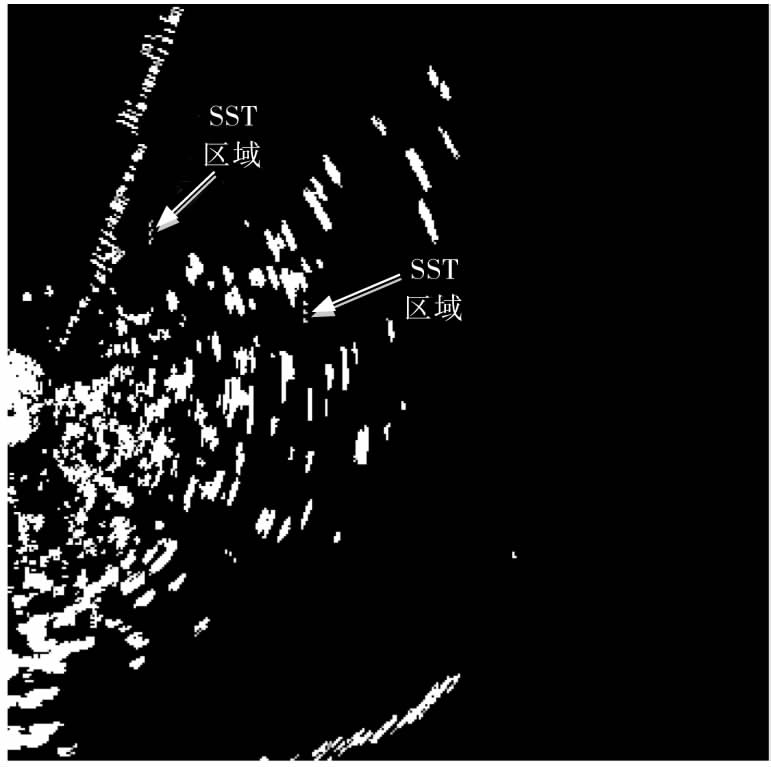
图2 多帧积累图像
由图2可知,相邻帧间不连续检测“SST区域”目标,通过多帧积累形成了一条较为显著的目标积累回波,极大地提高了地面雷达对SST的探测能力。把图2所示目标多帧积累图像通过滤波处理得到如图3所示的目标回波图。
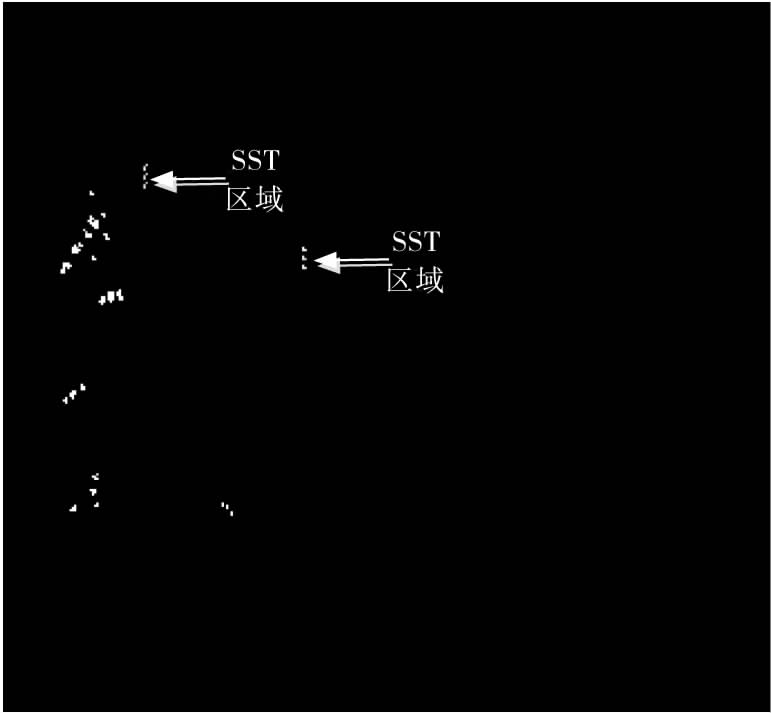
图3 目标回波图
由图2和图3可知,经过滤波处理大量的慢动杂波被成功滤除,多帧积累图像界面变得比较干净,但依然还存在部分慢动杂波同SST一起被保留下来,这类慢动杂波无论大小还是形状上都与SST极其相似,很难进行进一步的区分。
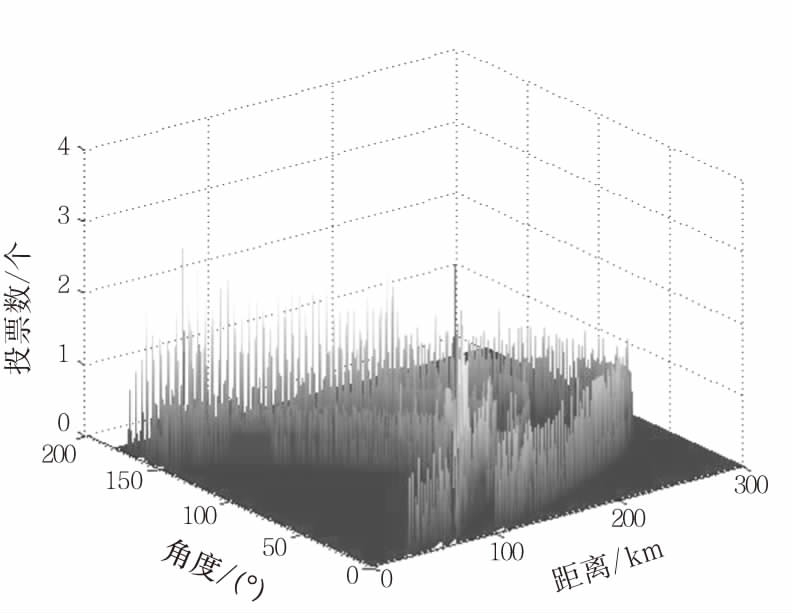
把图3所示的目标回波图进行Hough变换,得到如图4和图5所示投票矩阵示意图,其中横坐标表示直线到原点的距离ρ,纵坐标表示离散的角度单元θ,空间坐标表示积累单元投票个数。
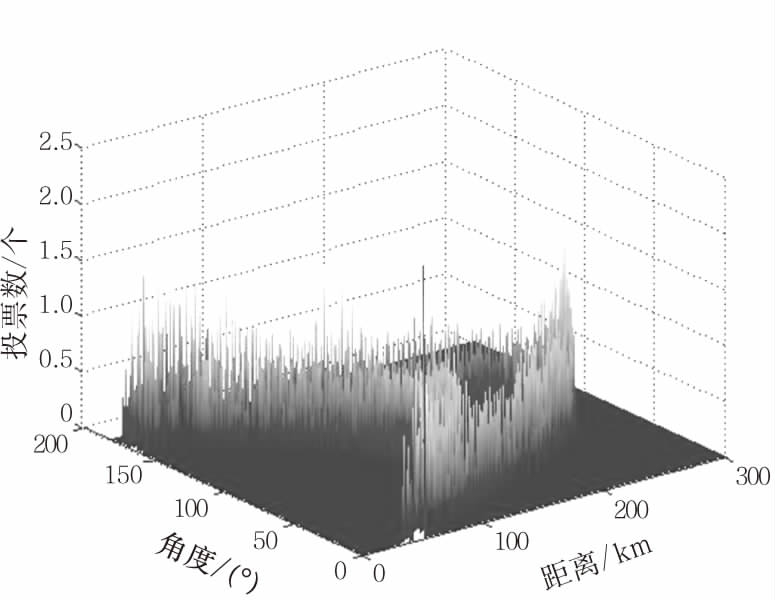
(a) W1加权Hough变换

(b) W2加权Hough变换
(c) W3加权Hough变换
图4 分类处理效果
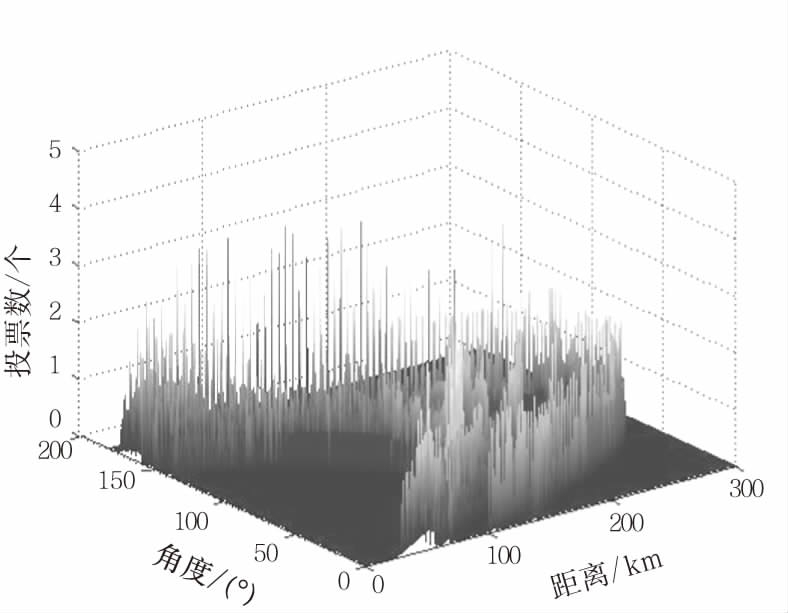
图5 未分类处理加权Hough变换
由图4和图5可知,W3投票值远大于W1和W2,若不进行分类处理,W3内目标回波被检测的概率最大,当检测门限较高时,W1和W2内的SST将会作为慢动杂波而滤除。分类处理把具有相似属性的目标回波分到一起,有效避免投票权值较大目标回波对较小目标回波的干扰,分类处理后在同一分类域中,H(A)越大则该回波是SST的可能性也就越大。未分类处理的SST不满足“H(A)越大是SST概率就越高”的规律,即H(A)大的目标回波不一定是SST,而H(A)小的目标回波也不一定就是慢动杂波,因此在没有进行分类处理就通过加权提高SST检测概率的做法显然是不可行的。
分别对分类处理和未分类处理加权Hough变换投票结果进行检测,门限c0=x·cmax,通过对该组数据仿真发现,当x<0.6和x>0.8时,加权Hough变换SST检测效果都不是很理想。利用正确目标回波提取个数(P1)、错误目标回波提取个数(P2)、正确航迹分析率(P1d)、错误航迹分析率(P2d)等指标来衡量航迹提取的优劣性,P1d和P2d的定义如式(5)、式(6)所示。当0.6≤x≤0.8,Δx=0.5时,加权Hough变换航迹提取效果如表1所示。
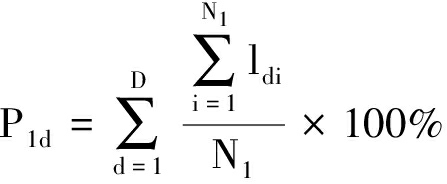
(5)
P2d=1-P1d
(6)
式中,ldi为第d次仿真实验中目标航迹i是SST航迹,D为蒙特卡罗实验次数,N1为第d次航迹起始的航迹个数。
表1 航迹提取效果
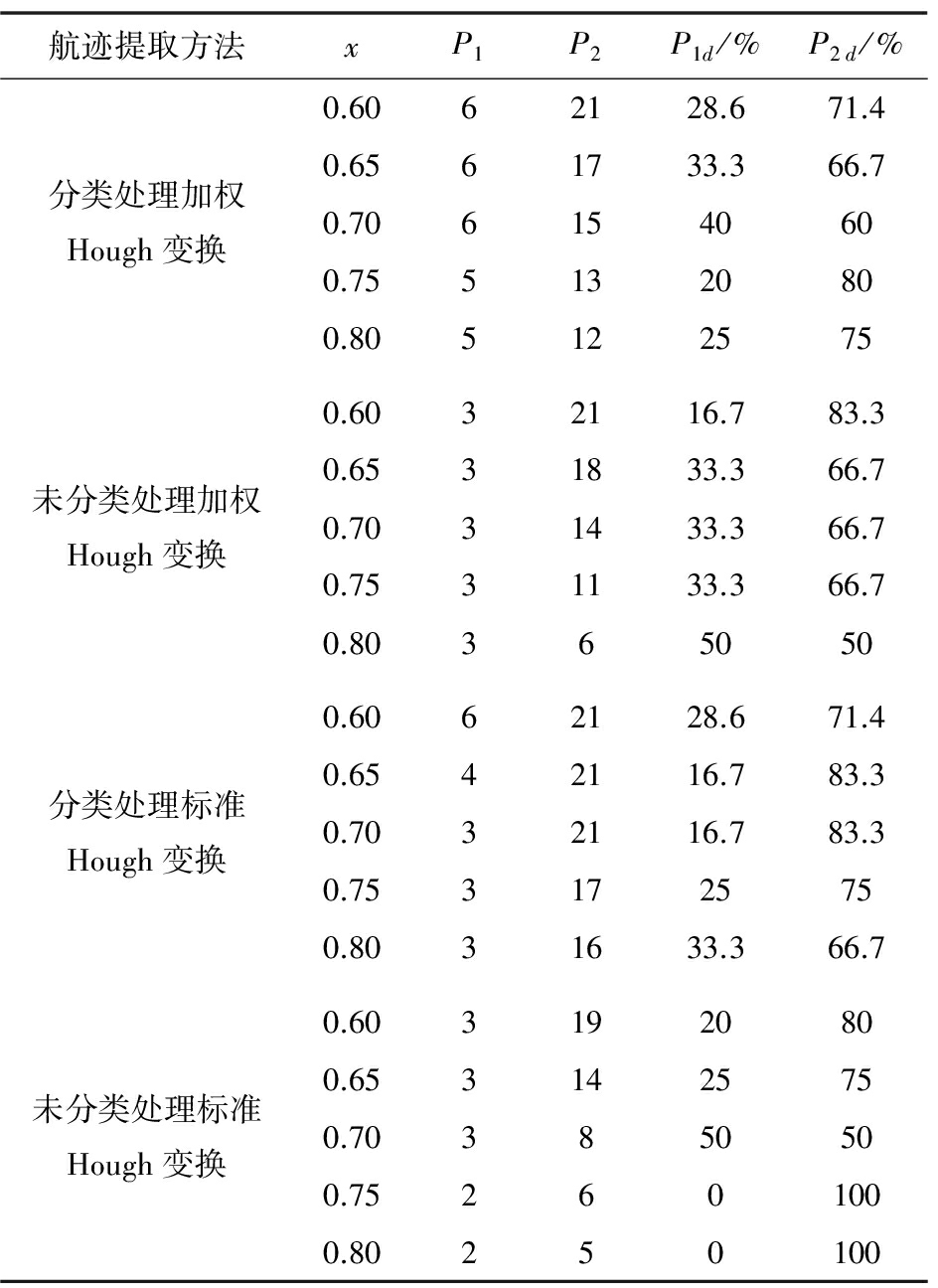
由表1可知,当x相同时,分类处理加权Hough变换正确目标回波提取个数远远多于其他3种方法。当门限提高时,分类处理加权Hough变换P2d变得越来越小,而其他3种方法P2d则变得越来越大。分类处理加权Hough变换能提取2个SST航迹,而其他3种方法最多只能提取出1个SST航迹,分类处理加权Hough变换对相邻积累回波不连通SST的探测能力比其他3种方法都要好。这主要是由于相邻积累回波不连通SST并不完全满足“占空比和长宽比越大该目标回波就是SST”的规律。分类处理不但可以避免目标回波间相互干扰,而且在同一个分类域中目标回波占空比和长宽比越大该目标是SST的概率也就越大;加权Hough变换航迹提取时,目标回波占空比和长宽比越大,加权权值也就越大,最终SST被航迹提取的概率也就越大。未分类加权Hough变换虽然对目标回波也有加权作用,但由于加权的对象不一定是SST,因此最终对SST的提取效果很有限。
由表1分析可知,所列举4种方法在x=0.7时航迹提取效果相对较好,因此4种方法在x=0.7时航迹提取效果如图6所示,其中点状区域表示目标回波,线条表示Hough变换航迹起始线。
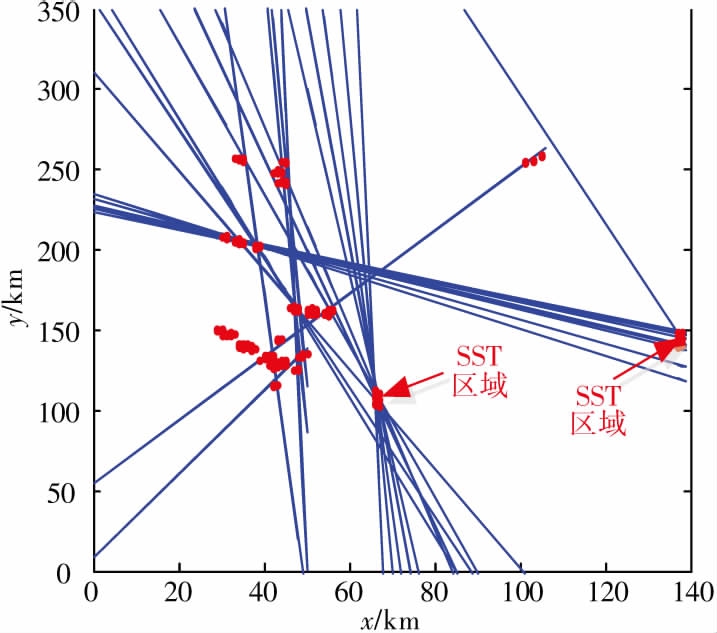
(a) 分类处理加权Hough变换
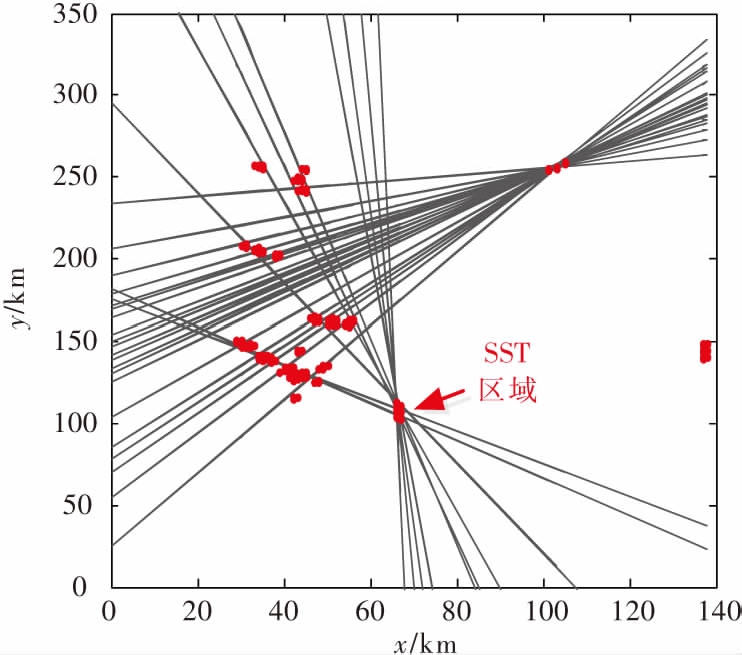
(b) 未分类处理加权Hough变换
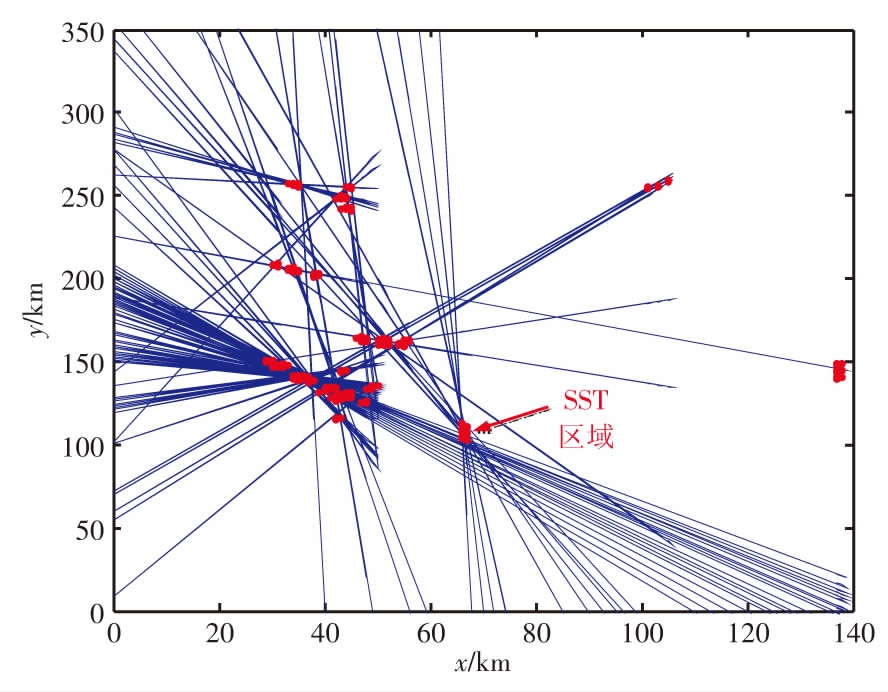
(c) 分类处理标准Hough变换
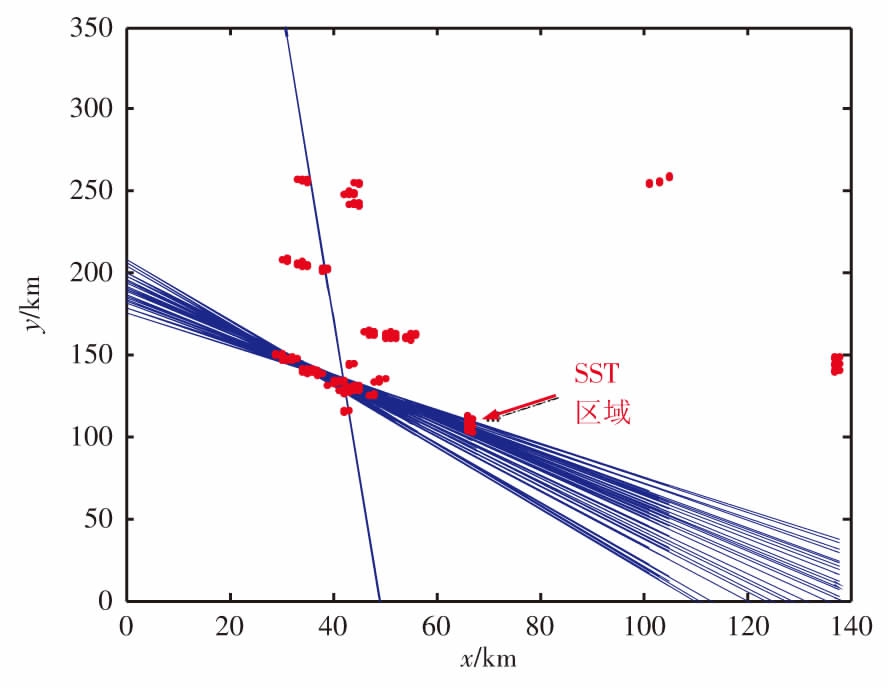
(d) 未分类处理标准Hough变换
图6 航迹提取效果
由图3和图6可知,分类处理加权Hough变换提取出了21个目标回波,要形成目标航迹目标回波的个数至少为3,因此这21个目标回波只能形成5个目标航迹,其中只有2个目标航迹是SST,所以SST正确航迹提取率为0.4;未分类处理加权Hough变换提取出了17个目标回波,能形成3个目标航迹,其中只有1个是SST航迹,因此该方法SST正确航迹提取率为0.333;分类处理标准Hough变换提取出了24个目标回波,能形成6个目标航迹,其中只有1个是SST航迹,所以SST正确航迹提取率为0.167;未分类处理标准Hough变换提取出了12个目标回波,能形成2个目标航迹,其中有1个是SST航迹,所以该方法对SST正确航迹提取率为0.5。通过上述分析可知,分类处理加权Hough变换对相邻积累回波不连通SST航迹提取概率要明显优于其他3种方法。
4 结束语
本文针对相邻积累回波不连通SST航迹起始难的问题,提出了一种基于Hough变换SST航迹提取方法。该方法利用积累回波占空比和长宽比对目标回波进行分类处理,把具有相似积累属性的目标回波分到同一个域中,在每个分类域中通过目标回波的占空比、长宽比和像素值对Hough变换的权值进行改进,提高SST被检测的概率。通过仿真分析可知,分类处理加权Hough变换对相邻积累回波不连通SST具有一定的探测能力。
参考文献:
[1] 韩晓飞,蒙文,李云霞,等.激光防御低慢小目标的关键技术分析[J].激光与红外,2013,43(8):867-871.
[2] AOUCHICHE L, FERRO-FAMIL L, ADNET C. An Adaptive Solution for the Detection of Small and Slowly-Moving Targets in Highly Ambiguous Radar Context[C]∥European Radar Conference, London: IEEE, 2016:101-104.
[3] WEN X, LIU H W, BAO M. A Slow Time Spectrum Integrate Detector for Range Spread Target Echo Sequence[J]. Journal of Xi’an Jiaotong University, 2013, 47(10):18-24.
[4] 蒙文,张文杰,李云霞,等. 强激光辐照低慢小目标抖动光斑功率密度估计[J]. 激光与红外, 2016, 46(11):1329-1333.
[5] 李菠,孟立凡,李晶,等. 低空慢速小目标探测与定位技术研究[J]. 中国测试, 2016, 42(12):65-69.
[6] 吴泽民,任姝婕,倪明放. 基于修正随机Hough变换的快速航迹起始研究[J]. 系统仿真学报, 2009, 21(5):1447-1450.
[7] LEI Pengzheng, FAN Chongyi, HUANG Xiaotao, et al. Weak Moving Target Detection with Multipath Clutter Suppression Based on Hough Transform[J]. 14th International Radar Symposium, Dresden: IEEE, 2013:774-778.
[8] 刘航,窦丽华,董领逊. 基于改进积累方式的Hough变换和最小方差航迹起始方法[J]. 火力与指挥控制,2009, 34(2):114-116.
[9] DUAN Liming, WANG Wei, ZHANG Xia . Circle Detection Through Improved Hough Transform[J]. Computer Integrated Manufacturing Systems, 2013, 19(9):2148-2152.
[10] 时银水,姬红兵,王学青,等. 基于随机Hough变换的航迹起始算法[J]. 模式识别与人工智能, 2011, 24(5):651-657.
[11] ZUO Lei, LI Ming, ZHANG Xiaowei, et al. Small-Target Detection in Sea Clutter Based on Improved Hough Transform[J]. Journal of Electronics & Information Technology, 2012, 34(4):923-928.
[12] HU Jing, ZHANG Tianxu. Velocity Estimation-Based Combinational Hough Transform Algorithm for Moving Point Target Detection[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2013, 41(1):106-110.
[13] YANG Yishu, SU Yixin, ZHANG Danhong. An Improved Hough Transform Applied to Lane Lines Extracting[J]. 2nd International Conference on Transportation Information and Safety, Wuhan: [s.n.], 2013:277-282.
[14] 徐颖. 基于特征的SAR图像配准算法研究[D]. 武汉: 空军预警学院, 2014:52-60.
[15] GOURGOULIAS K, KATSOULAKLS M A, REY-BELLET L. Information Criteria for Quantifying Loss of Reversibility in Parallelized KMC[J]. Journal of Computation Physics, 2017, 328:438-454.
