0 引言
现代防空作战中,随着武装直升机、巡航导弹和各种精确制导武器的大量使用,低空和超低空突防已成为对地攻击的典型作战样式[1]。防空雷达在作战过程中担负着发现敌方来袭目标的任务,其发现空中来袭目标的能力将直接影响武器系统的整体作战效能。防空雷达发现目标的能力不仅与雷达自身性能及来袭目标特性相关,还与雷达部署阵地周围环境密切相关。实际部署过程中,由于地形或地物对天线波束的遮挡,雷达对低空目标的探测距离和连续跟踪能力会受到极大的制约[2]。为合理部署防空雷达,提高其作战能力,需要作战指挥人员对雷达拟部署区域周围的阵地环境有详细了解。
目前,构建数字战场环境的方法主要是利用航空、航天遥感技术获取地球空间信息,并基于此地理信息数据构建虚拟战场[3]。该方法适合于大范围区域地理信息数据的获取,但受平台自身运行轨道、周期的限制,其成图精度较低、费用昂贵且缺少对局部区域地理信息的详细数据描述。随着近几年无人机技术的迅猛发展,人们也开始利用无人机作为遥感平台获取空间信息进行数据处理。该方法具有灵活机动、速度快、成本低、工作量小、可操作性强、可实时监测更新、适用于地形复杂地区等优点。
本文在上述研究的基础上,选取雷达典型部署环境,利用无人机航测和倾斜测量技术进行野外实地测量,通过对无人机的遥感数据进行处理,构建了实验区域的三维模型,获得了点云数据、数字表面模型、地形遮蔽角等地理信息,验证了基于无人机航测进行雷达部署研究的可行性和易于操作性,为作战指挥人员合理选取雷达部署阵地提供了可视化的、定量的、客观的辅助决策依据。
1 无人机航测系统集成
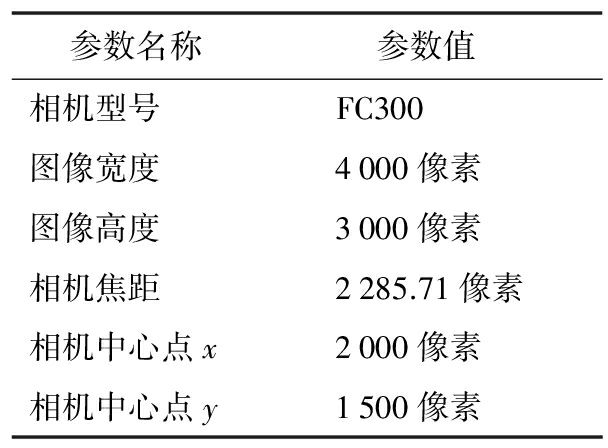
如图1所示,无人机航测系统的组成一般包括以下几个部分:无人机飞行平台、地面配套设备、通信设备和遥控设备[4]。本次实验构建的无人机航测系统实物模型如图2所示,该航测系统中的无人机飞行平台为大疆Phantom 4无人机,该无人机及其搭载的摄像获取设备的主要参数如表1、表2所示。
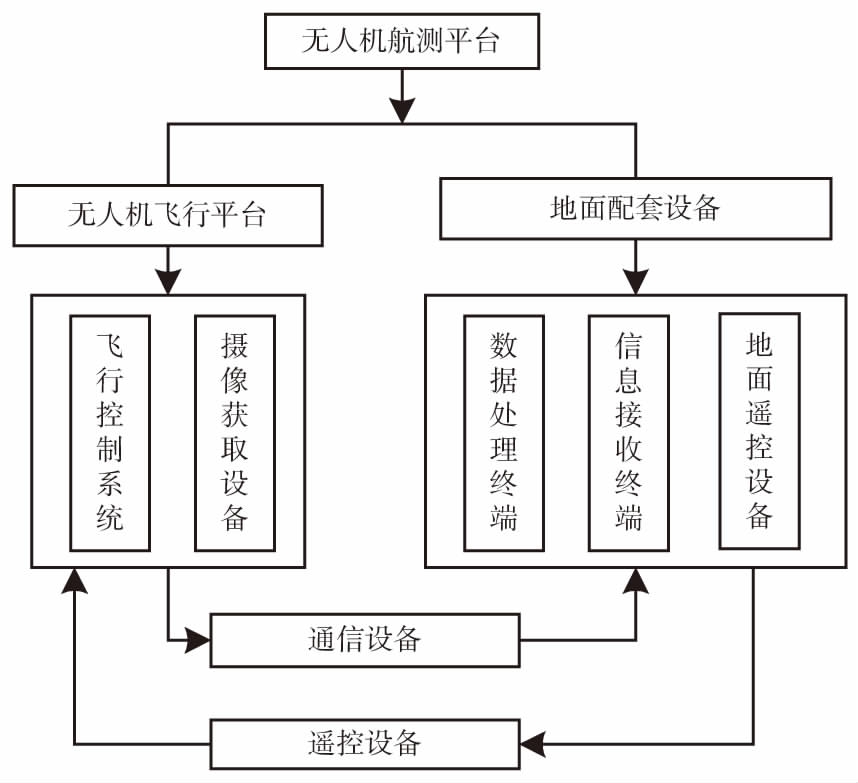
图1 无人机航测系统构成

图2 无人机航测系统实物模型
表1 飞行器参数
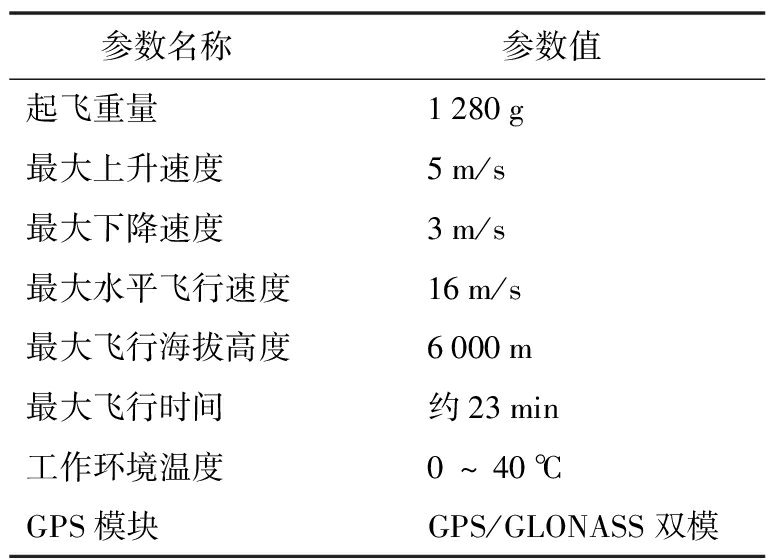
表2 摄像获取设备参数
2 无人机航测数据获取及处理
在无人机航测系统及其所搭载的传感器均能满足获取指定分辨率影像的基础上,为确保无人机航测系统获取的数据质量能满足成图和三维建模要求,需在执行飞行任务前对无人机的摄影航高、航摄分区及航线设计进行合理规划并遵守相应作业原则。
2.1 航测数据获取
2.1.1 航摄分区
为保证航摄范围内获取的影像能达到指定地面分辨率、航向重叠度,在保证成图精度的前提下,进行航摄分区[5]。航摄分区应遵循以下原则[6]:
1)分区界线与图廓线保持一致;
2)分区内地形高度差不大于1/6摄影航高;
3)在满足地形高差且能够保持航线的直线性的前提下,分区跨度可尽量划大,能完整覆盖整个摄区;
4)当地面高差突变,地形特征差别显著或有特殊要求时,可以突破图廓划分航摄分区。
2.1.2 摄影航高
摄影航高是指摄影瞬间航摄相机物镜中心相对于摄影区内平均高程面的距离[6]。在相机焦距给定情况下,摄影航高越小,则成图比例尺越大,分辨率越高,且有利于地理信息数据获取,但摄影航高过小,会导致航测工作量过大,需根据欲测绘地形图及三维建模的精度来综合确定。
根据图3,可推导出摄影航高、镜头焦距、影像分辨率、像元尺寸间的关系式:
(1)
式中,H为摄影航高(m),f为镜头焦距(mm),a为像元尺寸(μm),GSD为地面分辨率(m)。
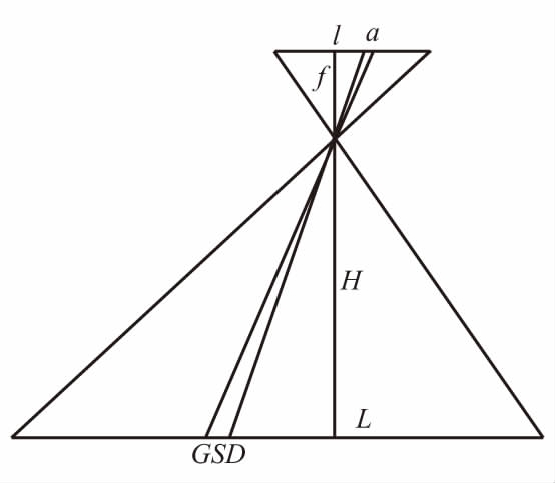
图3 航摄高度与地面分辨率的关系
2.1.3 航线设计
航线设计与无人机飞行平台、地面分辨率、重叠度、航高、飞行速度、测区范围和曝光参数等密切相关,是保证数据正确、满足生产要求的前提条件[7]。
根据上述作业原则,本次实验设置照片重叠度为85%,摄影航高为150 m,分别在相机倾角为90°(垂直向下)和45°时对340 m×256 m的区域进行数据采集,如图4所示。
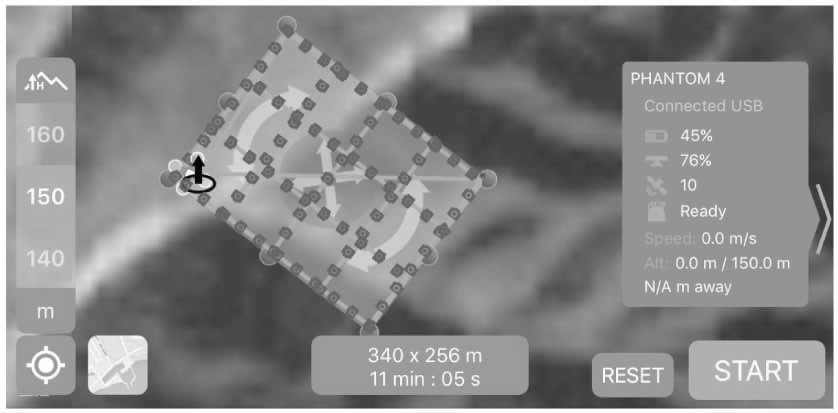
图4 航测任务过程图
2.2 航测数据处理
将本次无人机所携相机分别在倾角为90°和45°时采集到的数据(如图5所示)导入数据处理终端,由Pix4Dmapper处理后即可获得航测区域丰富的地理信息成果,包括航测区域的三维模型(如图6所示)和点云数据等(图5中所示高度为绝对高度,2.1.3节中所提摄影航高150 m为相对高度)。具体操作步骤如下:
1)新建航测项目;
2)添加影像;
3)选择合适坐标系、合理设置相机参数(参照表2);
4)进行空三加密处理,并生成三维模型。
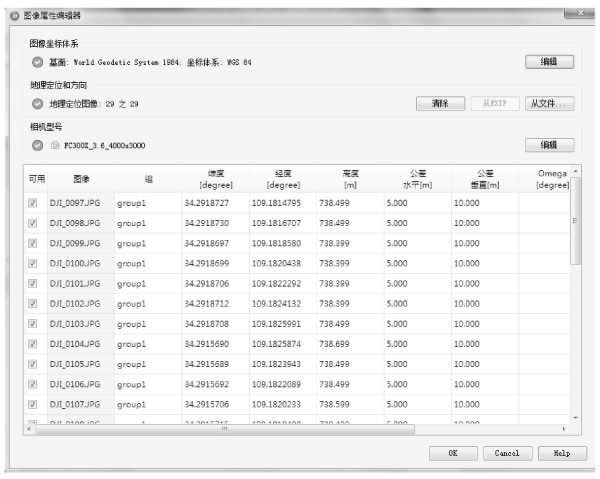
图5 部分航测数据
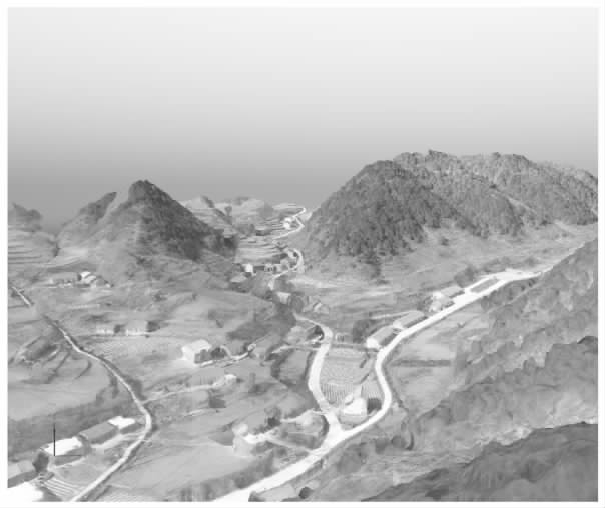
图6 航测区域三维模型
在三维模型中,可通过仰视、俯视等360°旋转操作,直观、准确地确定目标区域的位置、边界、长度、面积、体积、高程等信息,方便作战指挥人员根据作战实际合理选取雷达阵地,及时调整雷达部署方案,提高武器系统的整体作战效能。
本次航测实验由于没有添加地面控制点,导致其航测数据有些许偏差。该偏差通过量取三维模型中的长度、高度信息与实际的长度、高度信息进行对比可得。通过对比分析,可得本次试验长度精度为98%,高度精度为95%。该数据精度已满足一般运用要求,如需进一步提高精度,要根据具体飞行任务合理布设地面控制点。通过前期的实验验证,合理布设控制点后,数据误差将小于1%。
3 基于分段插值的地形遮蔽角计算与绘制
3.1 地形遮蔽角计算
遮蔽角计算一般要求每隔一定角度就必须计算给定范围内所有方向上的遮蔽角[8]。文献[2]中作者利用徕卡全站仪进行地形遮蔽角数据的采集,该方法虽然精度较高,但工作量较大,在雨、雪、雾天气采集数据较为困难繁琐,而且该方法只能得到已测点位的遮蔽角数据,倘若更换部署阵地需重新测量。
为实现地形遮蔽角的快速提取和计算,本文基于无人机航测数据,利用ArcGIS的空间分析功能和字段计算功能实现了航测区域内任意一点的地形遮蔽角的快速计算,其具体步骤如下:
1)将由Pix4Dmapper处理后获得的点云数据导入ArcMap,经数据格式转换后即可获得航测区域的数字高程模型(DEM),如图7所示;

图7 航测区域数字高程模型
2)在航测区域内任取一点A,以该点为圆心,创建半径400 m的缓冲区;
3)以点A为观察点,利用“构造视线”功能,构建缓冲区域内按顺时针方向排列的144条视线(间隔2.5°);
4)绘制间距为6 m的等高线,输出等高线与各视线的交点集,该点集将保留各视线的属性;
5)通过“多值提取至点”,获得点集中各点的高程数据;
6)利用“连接和关联”功能,获得点集中各点相对于观察点A的距离;
7)根据式(2),利用ArcGIS的字段计算功能,计算出点集中的所有点相对于观察点A的地形遮蔽角:
(2)
式中,φ为地形遮蔽角,Δd为距离差,Δh为高程差;
8)利用ArcGIS的统计分析功能,提取出各视线方向上最大地形遮蔽角。
获取地形遮蔽角过程如图8所示,提取的部分视线方向最大地区遮蔽角如图9所示。
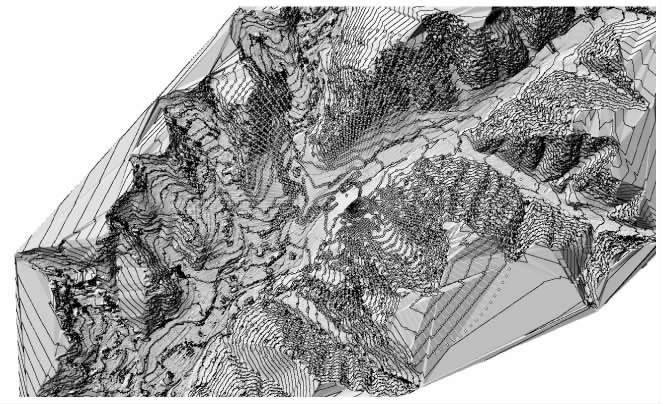
图8 获取地形遮蔽角过程图
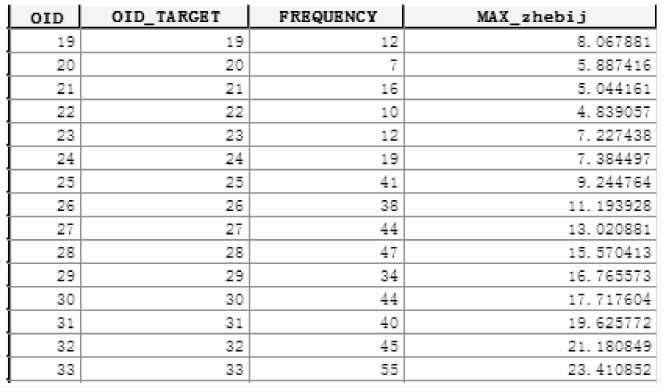
图9 部分视线方向最大地形遮蔽角
3.2 地形遮蔽角绘制
地形遮蔽角的大小及分布情况将决定雷达的具体部署位置,因此需对拟部署阵地的地形遮蔽角进行精确计算和绘制。该项工作的关键在于利用零散的地形遮蔽角数据拟合出一条遮蔽角曲线,使得该曲线能在一定的误差范围内尽量逼近遮蔽物轮廓线。结合文献[2]中几种常见插值方法的比较,本文基于所获得的航测区域内144条视线方向上的离散遮蔽角数据,利用分段三次Hermite插值方法实现雷达遮蔽角的精确计算和绘制。
设已知节点a=x0<x1<…<xn=b,给定函数值yi=f(xi),![]() =f′(xi)=mi(i=0,1,…,n),构造一个导数连续的分段插值函数Ih(x),满足如下条件:
=f′(xi)=mi(i=0,1,…,n),构造一个导数连续的分段插值函数Ih(x),满足如下条件:
1)Ih(x)∈C′[a,b];
2)Ih(xi)=f(xi),![]() (xi)=f′(xi),i=0,1,…,n;
(xi)=f′(xi),i=0,1,…,n;
3)Ih(x)在每个小区间[xi,xi+1]上是三次多项式。
则可得每个分段区间[xi,xi+1]上两点三次Hermite插值多项式:
Ih=yiai(x)+yi+1ai+1(x)+![]() βi(x)+
βi(x)+![]() βi+1(x)=
βi+1(x)=
(3)
式中,ai(x),βi(x),i=0,1,…,n,分别满足插值条件:ai(xj)=δij,![]() (xj)=0,βi(xj)=0,
(xj)=0,βi(xj)=0,![]() (xj)=δij,其中,
(xj)=δij,其中,![]()
现将该插值方法运用到航测区域观察点A的遮蔽角数据中进行插值效果验证(插值精度1°),图10为利用该插值方法拟合的遮蔽物轮廓图(地理真北方向作为方位0°的基准),图11为地形遮蔽角图。
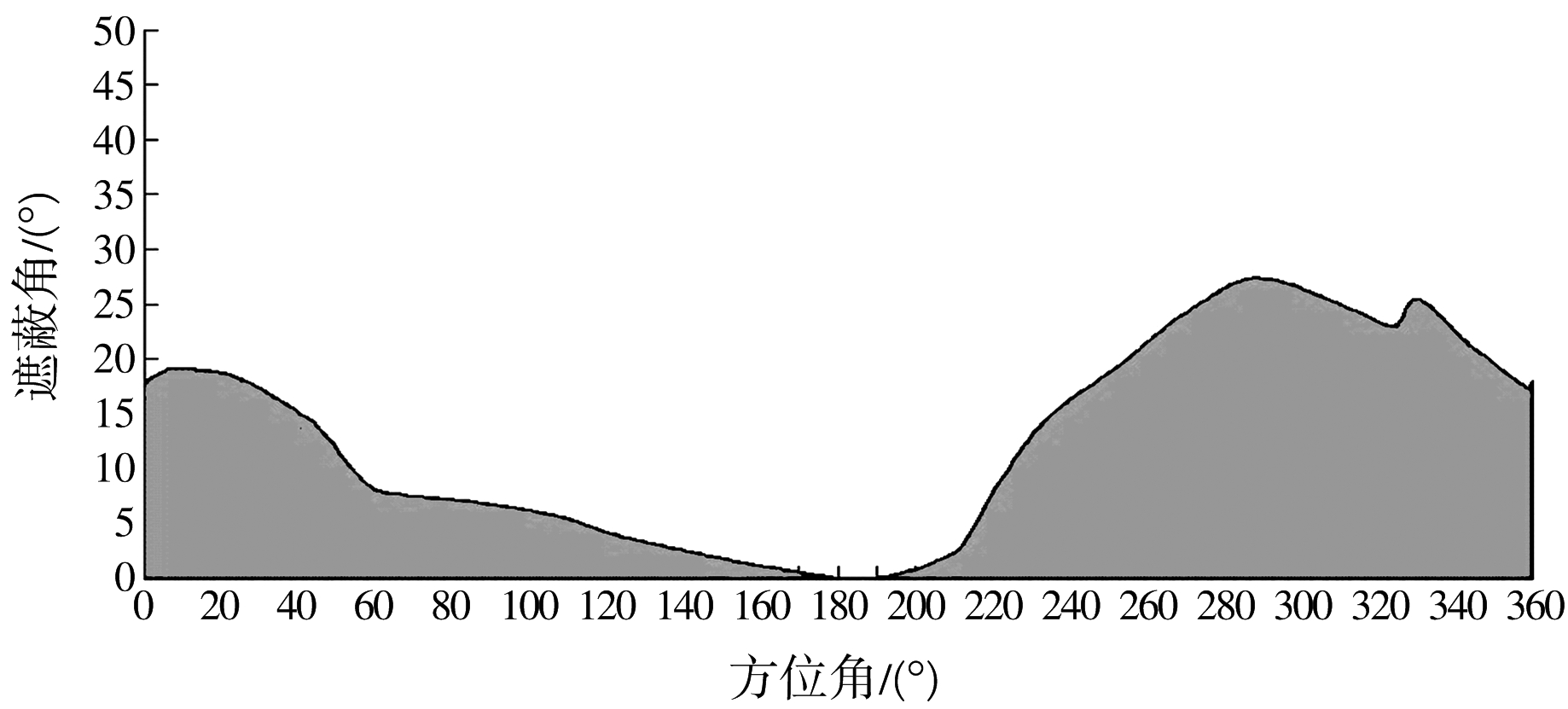
图10 遮蔽物轮廓拟合图

图11 遮蔽角图
遮蔽角对雷达探测的主要影响在于缩短了雷达的探测范围[9]。当雷达探测低空远距目标时,除了要考虑遮蔽角因素外,还需考虑地球曲面和大气折射。由图12所示空间关系可得的雷达探测距离、遮蔽角与来袭目标飞行高度满足如下关系式:
(4)
式中,D为雷达探测距离,Rg为考虑大气折射后等效的地球半径,Rg=8 500 km,H为来袭目标高度,θ为遮蔽角。由式(4)可得,雷达最大探测距离将随着遮蔽角的增加而大幅减小,而当目标飞行高度降低时,雷达可能发现目标的最大距离也成比例缩短[10]。因此,作战指挥人员在选取雷达阵地时,在可用地面面积和地形坡度满足条件的基础上,一方面要尽量选择遮蔽角位置较小的位置,另一方面部署时要尽量升高雷达天线,减小遮蔽角。
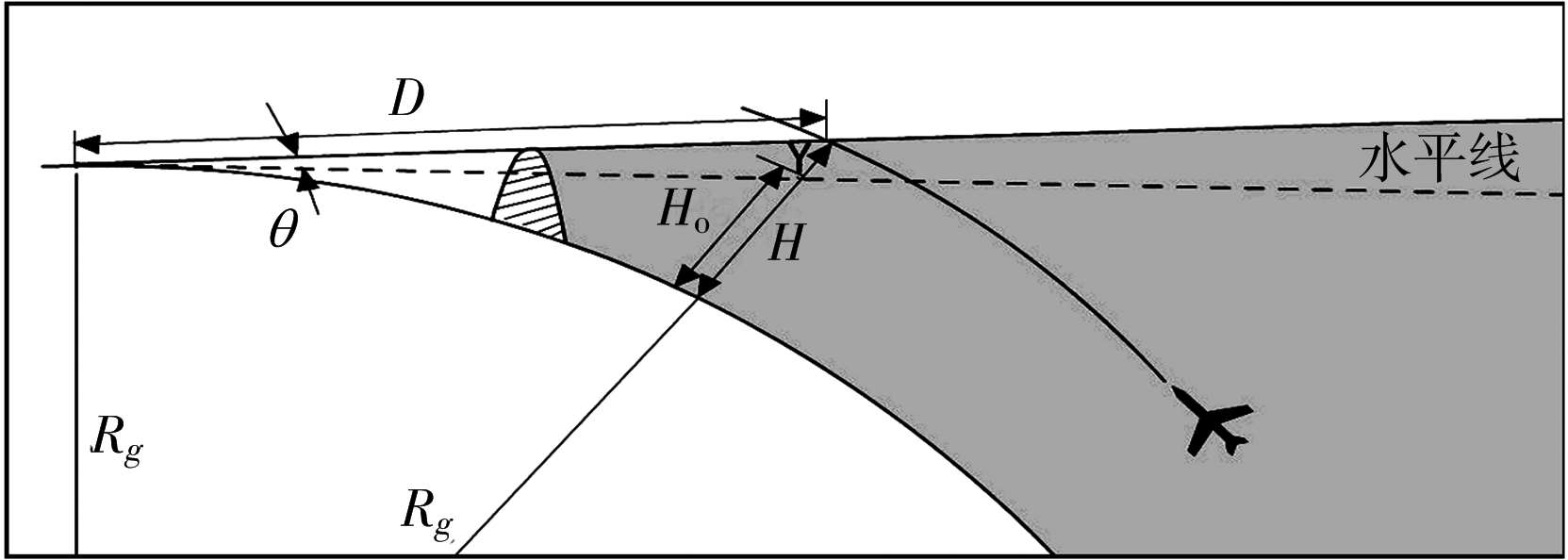
图12 地球曲面上的雷达探测示意图
4 防空雷达部署的应用举例
为进一步说明上述基于无人机航测的防空雷达部署方法,本文假定某一特定作战空情来具体阐述其运用中的一些问题。
4.1 作战想定
1)敌方基本情况
接上级情报部门通报,远程预警机探测到有敌方多架作战飞机从正南方向(方位角180°)来袭,欲对我方某要害目标(位于本次航测区域)实施空袭。
2)我方基本情况
我方预设有两处雷达待部署阵地(A,B),防空雷达一台(最大探测距离50 km)。
4.2 部署分析
现利用航测数据处理终端(Pix4Dmapper)及ArcGIS地理信息系统,对航测区域内拟部署雷达阵地(A,B)按照第2,3节所述方法进行处理编辑获得其雷达遮蔽角数据,根据式(4)可得当雷达分别部署于A区域和B区域时的理论极限探测范围,如图13、图14所示。
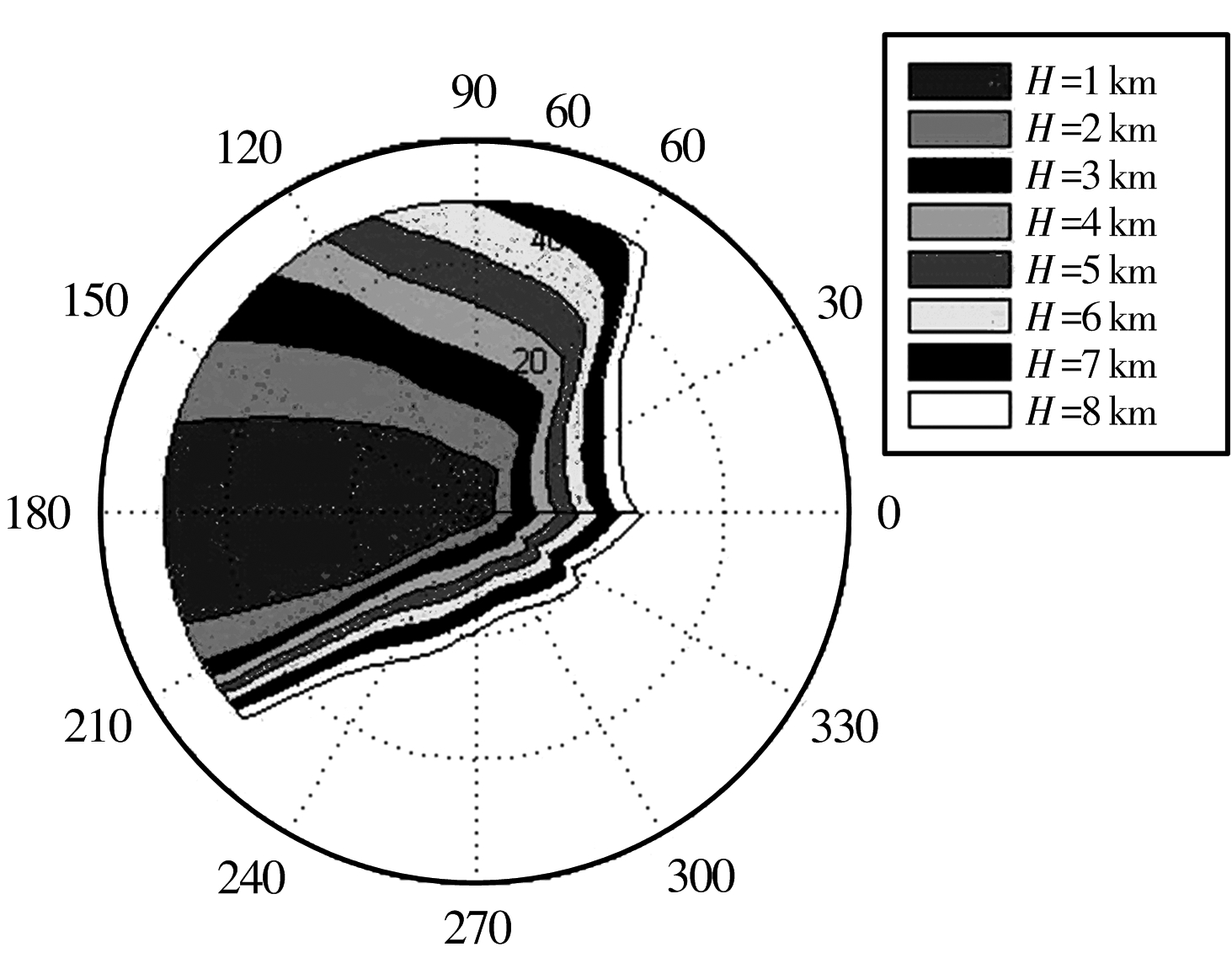
图13 A区域雷达极限探测距离
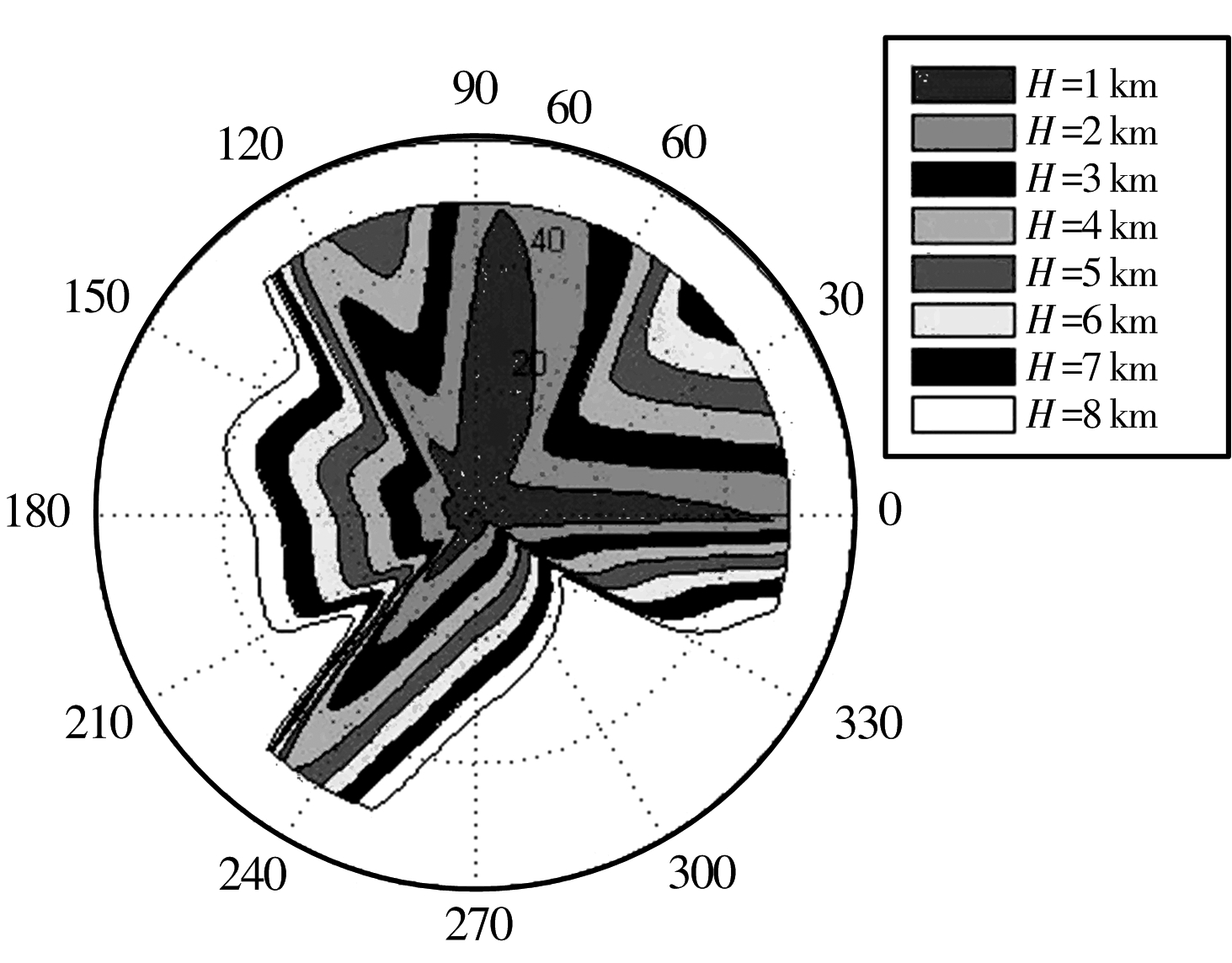
图14 B区域雷达极限探测距离
图13和图14分别显示了雷达部署在A区域和B区域时对不同高度的敌方来袭目标的理论极限探测距离。从图中不难分析出:不管雷达部署在A区域还是B区域,来袭目标的飞行高度越高,雷达能在越远的距离上发现来袭目标;当飞行高度足够高时,地形遮蔽角将不再影响雷达的极限探测距离,此时该雷达的探测范围将达到最大(50 km)。若雷达部署在A区域将对方位角60°~220°的来袭目标有较大的探测距离;若雷达部署在B区域将对方位角0°~130°,220°~250°,330°~360°的来袭目标有较大的探测距离。
本次作战根据预警信息,敌方的主攻方向为正南方向(方位角180°),故将防空雷达部署在A区域将能尽早探测到来袭目标,为防空导弹或防空高炮摧毁来袭目标预留足够的时间。
5 结束语
本文提出的基于无人机航测数据进行雷达部署研究的方法为作战指挥人员合理选取雷达阵地、优化雷达部署提供了直观形象、科学定量的辅助决策依据。该方法经实验验证满足可操作性,具有较好的实践意义和指导意义。本文虽然只分析了该方法对防空雷达部署的影响,但由于阵地环境对防空高炮和防空导弹的部署同样有影响[2],故该方法也适用于为防空高炮和防空导弹的部署提供参考依据。该方法在本次试验中由于航测区域范围(340 m×256 m)有限只考虑了半径400 m范围内地形遮蔽角对雷达最大探测距离的影响,且存在航测作业流程规范需进一步提高的问题,需要在下一步工作中加以改进,以提高构建模型和航测数据的精度和准确性。
参考文献:
[1] 王豪.大区域多尺度雷达遮蔽角计算关键技术研究与实现[D]. 郑州: 解放军信息工程大学, 2011.
[2] 张迪哲. 基于分段插值的雷达遮蔽角绘图的研究和实现[D]. 西安: 西安电子科技大学, 2015.
[3] 陈娇. 无人机航摄系统测绘大比例尺地形图应用研究[D]. 昆明: 昆明理工大学, 2013.
[4] 杨瑞奇,孙健,张勇. 基于无人机数字航摄系统的快速测绘[J]. 遥感应用, 2010(3):108-111.
[5] 国家测绘局.低空数字航空摄影规范: CH/Z 3005—2010 [S]. 北京: 测绘出版社, 2010.
[6] 杨永明. 无人机遥感系统数据获取与处理关键技术研究[D]. 昆明: 昆明理工大学, 2016.
[7] 王佩军,徐亚明. 摄影测量学: 测绘工程专业[M]. 2版. 武汉: 武汉大学出版社, 2010:93-107.
[8] 黄太山. 巧用空间叠置分析计算遮蔽角[J]. 北京测绘, 2014(6):55-57.
[9] 陈达,段耀峰,王剑. 地形影响下的雷达探测范围建模与三维可视化[J]. 地矿测绘, 2012, 28(4):21-23.
[10] 首照宇. 地形遮蔽的雷达低空探测效能研究[J]. 微计算机信息, 2005,21(12):208-209.