潘 浩 , 孙建军 , 刘 钦
(西安导航技术研究所, 陕西西安 710068)
摘 要 : 针对舰艇编队雷达网遭受噪声压制干扰现状,首先讨论了单雷达设备干扰对抗动态过程。在此基础上,提出雷达网平均自卫距离效能评估指标,充分利用编队的空间分集特点,动态实时地对最佳雷达指定空域的探测数据信息进行处理建航。最后进行了仿真分析,结果显示:在舰艇所辖单雷达设备具有恒虚警处理能力的前提下,该方法可有效改善舰艇编队在噪声压制干扰环境下的探测距离。所提方法不仅可以作为战时编队雷达管控的决策依据,也可为战前编队队形筹划提供指导和建议。
关键词 : 海上编队; 雷达组网; 协同; 效能分析; 压制干扰
在现代空袭作战中,舰载电子战飞机通过对雷达系统实施干扰,使对方防空系统难以发挥作用。随着EA-6B电子战飞机的退役,EA-18G“咆哮者”成为当下最先进、最具代表性的电子战飞机。通过搜集现有资料,噪声压制干扰是EA-18G的首要干扰方式,主要是通过辐射大功率杂波或噪声调制类信号抬高雷达的基底噪声,提高检测门限并阻碍雷达对目标的正常检测和录取,如宽带阻塞、窄带瞄准和扫频干扰等 [1-3] 。
单雷达通过降低副瓣电平,采取副瓣对消和副瓣匿影等措施可以在一定程度上能够对抗从雷达副瓣进入的噪声信号,但对从主瓣进入的干扰噪声仍无能为力;海上编队所辖多部雷达,各成员舰艇通过领受任务、情报共享、数据融合等方式,实现雷达组网探测,在对抗“单平台式作战理念”的干扰方式具有一定优势。文献[4]以组网雷达预警距离作为雷达网抗干扰效能评估指标,给出较好的雷达网布局方案,计算得到组网后雷达的预警距离比各单部雷达明显增大,但该技术需要预先知道被掩护飞机的来袭方向。文献[5]从连续性和严密性两个方面考虑,提高了对警戒责任区的覆盖率。文献[6]基于遗传算法,通过合理管控雷达资源完成对责任区的保障任务,但仍然是以保证雷达网对责任区空域探测覆盖的连续性和严密性等为目标。文献[7]通过建立有源与无源雷达组网协同抗干扰部署优化模型,有效减小了雷达网探测区域的盲区,但这些方法仍属于静态战前筹划评估范畴。本文考虑到战时敌方飞机来袭方向未知的特点,提出平均自卫距离的概念,以此为指标动态实时融合最佳雷达指定空域的探测数据信息,最大程度地改善编队受干扰雷达在噪声压制干扰环境下的作用距离,同时也可为战前编队队形提供指导和建议。
依据雷达方程,雷达在未受干扰时的最大作用距离为
(1)
式中, P t 为发射功率, G t 为发射天线增益, A e 为天线有效孔径, σ 为目标RCS, L s 为雷达系统损耗, L f 为目标起伏损耗, N = kT 0 BF n 为雷达接收机内部热噪声功率, k =1.38×10 -23 为玻耳兹曼常数, T 0 一般取290 K, B 为接收机噪声带宽, F n 为接收机噪声系数,( SNR ) m 为积累 m 个脉冲时雷达检测目标所需最小信噪比。
雷达对抗是一个二元竞争动态过程,这个过程可以用图1描述。
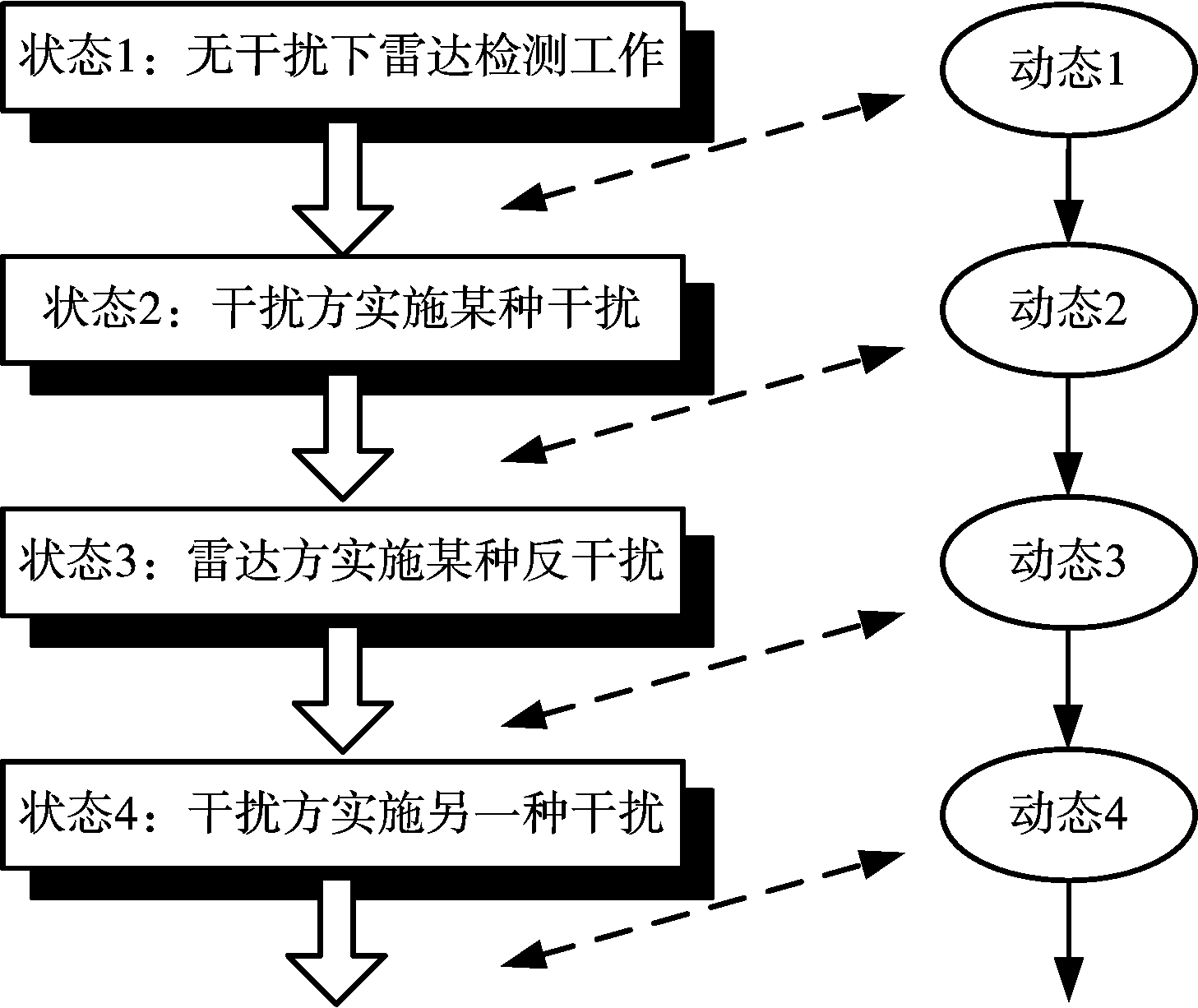
图1 雷达对抗二元竞争动态过程
1) 状态1
此时,影响雷达的是接收机噪声功率 N = kT 0 BF n 。
2) 状态2
雷达未采用捷变频技术,在固定的发射频率下工作,干扰方只需要瞄准式干扰,干扰功率 P j ,干扰带宽 B j 略大于雷达接收机带宽 B r 。通常雷达接收到的干扰功率远大于接收机内部热噪声,故噪声影响可忽略。进入雷达的干扰功率为
(2)
式中, P j 为干扰机功率, G j 为干扰机天线最大增益, θ 为干扰机方向与雷达主波束中心之间的夹角, R j 为雷达与干扰机之间的距离, G ( θ )为雷达在干扰机方向的增益,经验公式如下:
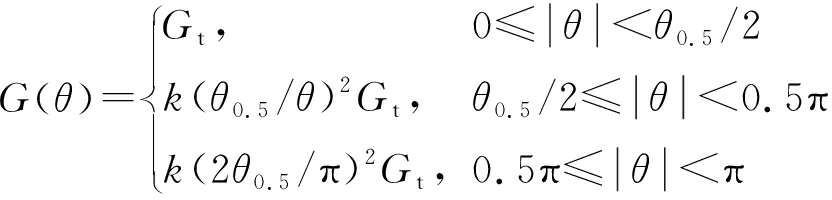
(3)
式中, θ 0.5 为雷达波束半功率点宽度, k 取[0.04,0.1],高增益天线 k 取值[0.07,0.1]。
3) 状态3
若雷达采取自适应捷变频技术,则雷达总工作在干扰区外,干扰完全失效,雷达恢复到无干扰下的状态;若雷达采取一般捷变频技术,雷达受到干扰的概率为
P ja = ![]() p ( f t )d f t
p ( f t )d f t
(4)
式中, f 1 , f 2 为干扰所能覆盖的最低、最高频率, p ( f t )为雷达发射频率的概率密度分布函数。
4) 状态4
干扰方通过侦察判断雷达的捷变频频带,采取阻塞式干扰。
由于干扰带宽覆盖整个频域,雷达将受到干扰。设此时干扰的带宽为 B 1j ,干扰带宽 B j 远大于雷达接收机带宽 B r ,进入雷达接收机的干扰功率为
(5)
自卫距离定义:远距离支援式干扰战术下,干扰机与雷达的距离通常固定不变,随着目标与雷达间距离的减少,雷达接收机端的干信比逐渐减小。当干信比等于雷达在干扰中的可见度(压制系数)时,雷达能够以一定的检测概率( P d =0.1, P f =10 -6 )发现目标。此时,目标与雷达之间的距离称自卫距离。
干扰暴露区定义:雷达受到干扰时仍能发现被保护目标的区域,即雷达在各个方向上自卫距离构成包络线的内部区域。
文献[2]指出,压制系数与雷达信号处理方法(脉冲积累个数、是否进行MTI,MTD等)有关,实际计算过程中较难获取,这里采取与雷达正常工作距离类比的方式进行计算 [3] 。
假设进入雷达接收机的干扰噪声功率为内部热噪声功率 N 的 Q 倍,在与计算雷达最大作用距离同样的检测概率和虚警概率,雷达对处于干扰环境下目标的作用距离(假设雷达完成恒虚警处理,检测所需的信噪比与干扰前相同)可等效为
(6)
因此,由干扰方程
(7)
可知
(8)
可得雷达在 θ 方向上的自卫距离为
(9)
式中, c 为光速, f 为雷达工作频率, R max 为无干扰情况下雷达的最大作用距离。
由式(9)可知,噪声干扰环境下,雷达在各方向上的自卫距离并不相同,而目标可能从任意方向来袭,因此,将 θ 角度离散化{ θ 1 , θ 2 ,…, θ N },这里定义雷达平均自卫距离:
(10)
对雷达有效实施干扰需满足3个对准条件:时间对准、频率对准和空间对准。时间对准即干扰信号与雷达信号在同一时间段内向外辐射;频率对准即干扰带宽需要覆盖雷达的信号带宽;空间对准即干扰波束能在方位/俯仰上覆盖雷达所处空间位置。干扰机在执行任务时会不间断地向外辐射干扰信号,时间对准满足,雷达是否受到干扰主要取决于空间对准和频率对准两个条件。
1) 瞄准式干扰的影响
空间上,干扰波束对编队覆盖范围 W h 的计算公式:
W h = θ az · D j
(11)
式中, θ az 为方位波束宽度, D j 为干扰机距编队中心的距离。以公开文献报道EA-18G所携吊舱干扰波束宽度30°为例,由于海上编队舰舰通信距离的约束,舰舰间距最大不超过40 km,根据表1干扰波束在不同距离上对编队覆盖范围的分析计算,同一个干扰波束在空间上能够全部覆盖呈单纵队、两舰方位队、三角队、菱形队等基本队形的编队。
表1 压制干扰波束覆盖宽度
频域上,瞄准式干扰带宽较窄,在雷达信号频带内的干扰功率强,但对频率引导要求较高。以两舰编队为例,如图2所示。
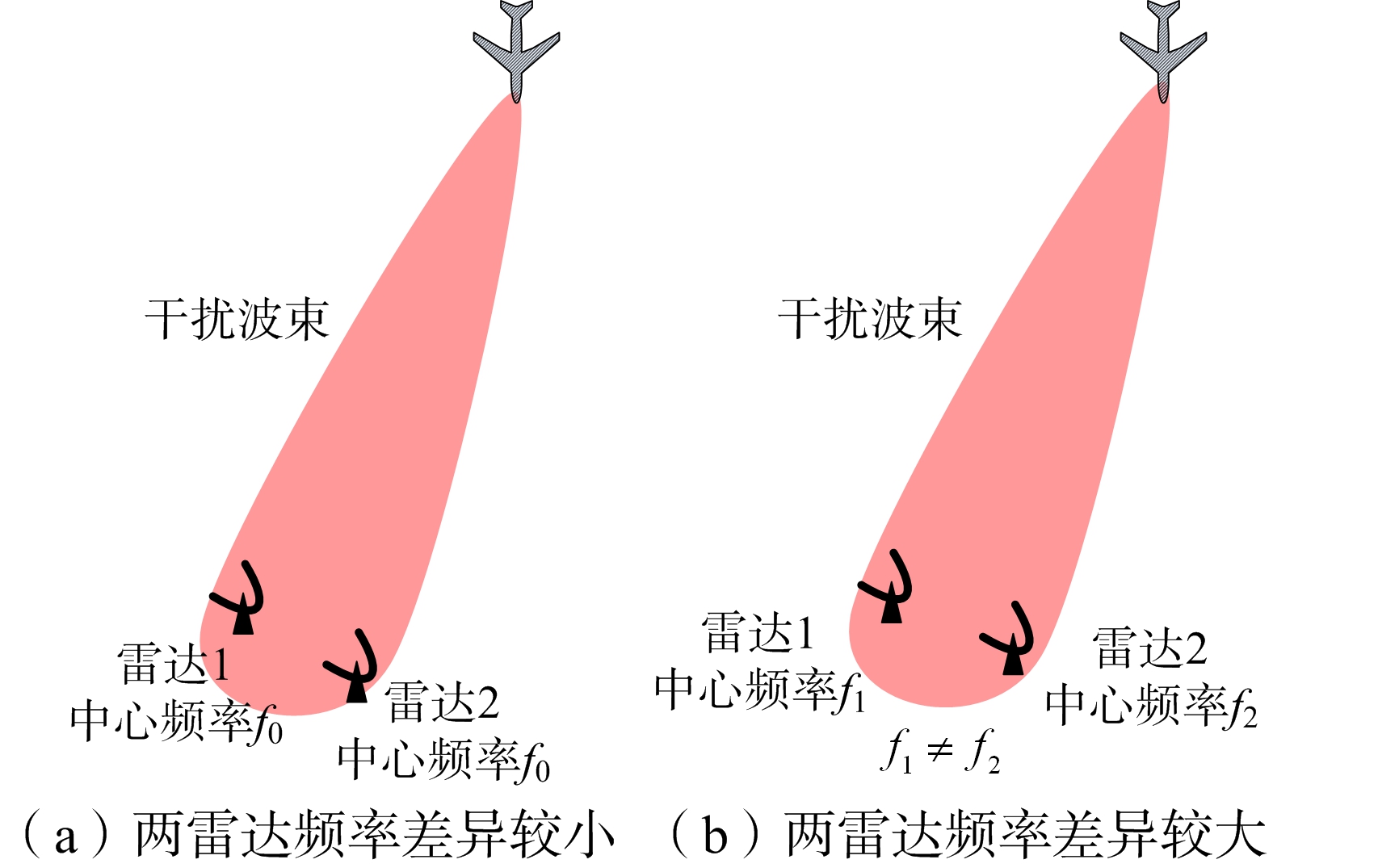
图2 同一波束干扰两舰编队示意图
① 当编队两雷达发射信号的中心频率相近时,两雷达会受到同一波束的瞄准式干扰,如图2(a)所示,编队整体受干扰。
② 当编队两雷达发射信号的中心频率差异较大,或者雷达自身采取自适应捷变频、随机跳频等措施时,两雷达不会遭受同一波束的瞄准式干扰,如图2(b)所示,编队部分受干扰。
当EA-18G提前获取我方雷达工作频段后,通过合理搭配吊舱组合,可利用多个干扰波束对多部雷达同时进行瞄准式干扰,并不仅仅对编队施放单一干扰波束。根据EA-18G载荷能力来看,1架EA-18G一般携带3个干扰吊舱,考虑兼顾对通信设备的干扰,一般携带2个雷达干扰吊舱,当编队雷达数量超过2个,1架EA-18G无法对编队所辖各雷达实施瞄准式干扰;当有多架EA-18G时,编队所辖各雷达均会受到瞄准式干扰。
当舰载雷达采取随机跳频,干扰侦察机无法同时获取编队所有雷达的工作频率,往往扩展干扰带宽,实施宽带阻塞式干扰。
2) 阻塞式干扰的影响
由于舰载主战雷达通常工作在S,C波段,通过合理搭配吊舱组合,1架EA-18G完全能够同时覆盖雷达的工作频带,编队整体受干扰。
与单雷达设备抗干扰不同,雷达网通过相互协同不仅具有单设备的抗干扰能力,还获得了“体系、融合和控制”的协同抗干扰优势。“体系”就是通过组网雷达频率分集、空间分集,实现组网雷达群整体抗干扰;“融合”就是通过数据链系统收集编队各平台雷达探测信息,进行点迹/航迹融合,在复杂的干扰环境下发现并提取有用信息,实现目标的连续跟踪;“控制”就是根据融合反馈信息,以抗干扰效能最佳为原则,选择最优的探测雷达组合,并对其搜索扇区、工作/扫描方式、工作时间进行控制。

图3 雷达组网抗干扰效能示意图
如图3所示,电子战飞机对两舰编队实施噪声压制干扰,雷达 A 和雷达 B 通过采取副瓣对抗措施可以在一定程度上能够对抗从雷达副瓣进入的噪声信号,但对从主瓣进入的干扰噪声手段有限,表现在雷达干扰方向上的自卫距离大幅减小,非干扰方向上的自卫距离减小并不明显。不妨设两部雷达的自卫距离分别为 R jmax A 和 R jmax B ,利用雷达 A 与雷达 B 空间分集特点,其非干扰方向上的探测 R jmax A ( θ j )可以有效改善雷达 B 在干扰方向上的自卫距离,将其协同前在该方向自卫距离 OE = R jmax B ( θ i )延长到 OF = R jmax B_gain ( θ i ),那么通过协同,雷达 B 平均自卫距离提升率表示为 k_gain =( R jmax B_gain - R jmax B )/ R jmax B 。
因此,根据编队内各舰主战雷达性能及所处位置,以受干扰雷达平均自卫距离最大化为原则,选择并控制最佳协同平台雷达搜索扇区,通过收集协同平台雷达指定空域的探测数据,采用数据融合技术,实现对目标提早建航跟踪(与单雷达设备相比)。
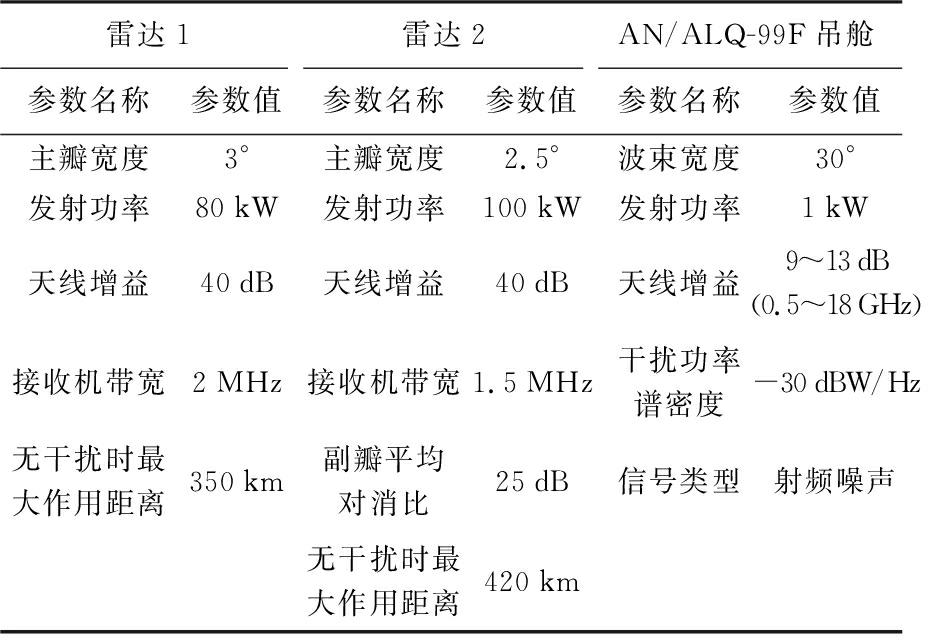
假设我方编队所辖主战雷达分别为雷达1和雷达2,干扰机为1架EA-18G,具体参数如表2所示。不同场景下,通过协同选择最佳平台雷达,编队雷达网抗干扰效能分析结果如表3~表6所示。
由于雷达的自卫距离是以检测概率 P d =0.1定义的,对比起见,这里雷达无干扰时的最大作用距离同样以检测概率 P d =0.1给出。
表2 仿真参数
场景1:典型编队呈菱形队形向正北方向航行,平台 A / C 所辖雷达1,平台 B / D 所辖雷达2,舰舰间距20 km,干扰机位于编队正北方位,如图4所示。简化起见,编队中心设为坐标原点(0,0),干扰功率谱密度-30 dBW/Hz,其他参数设置均如表2所示,编队各受干扰雷达的平均自卫距离提升率如表3、表4所示。
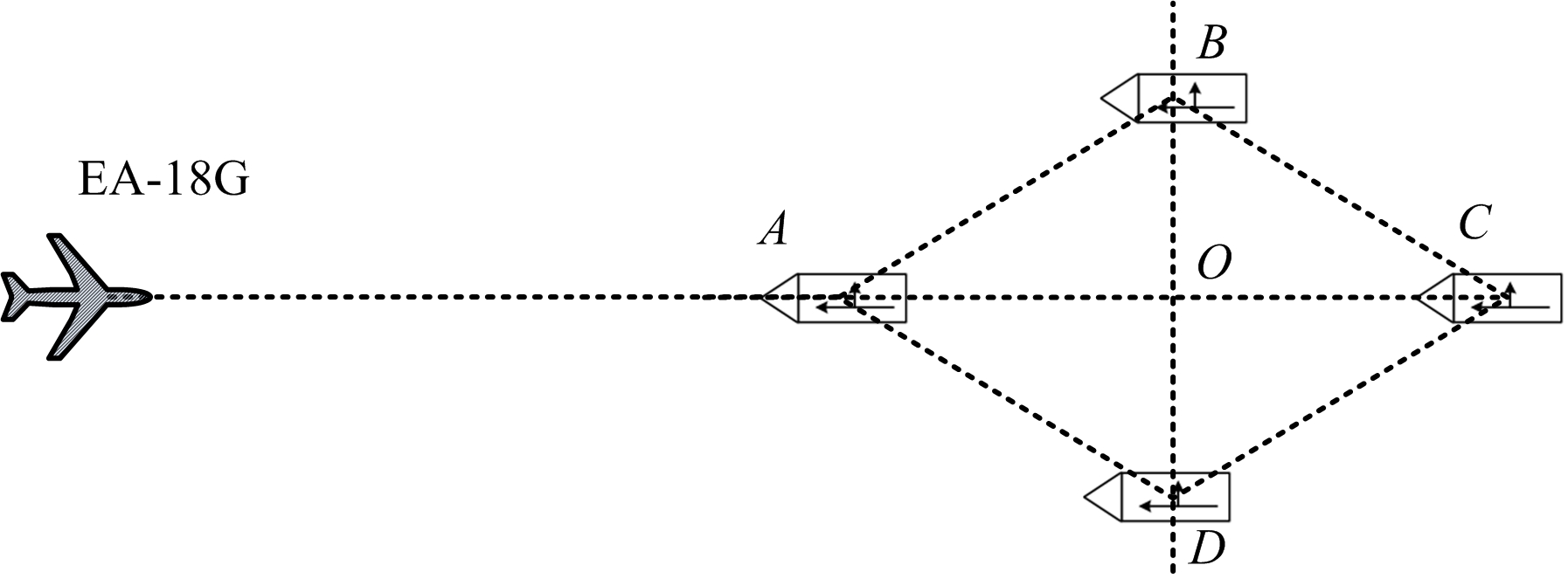
图4 典型编队形式示意图
表3 编队雷达平均自卫距离汇总
(干扰机距编队中心200 km)
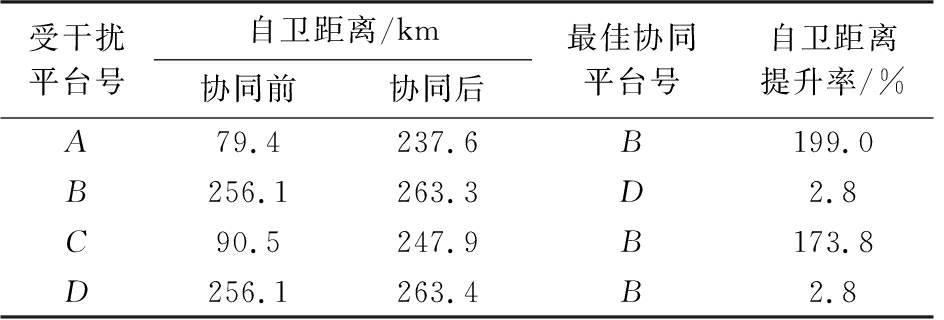
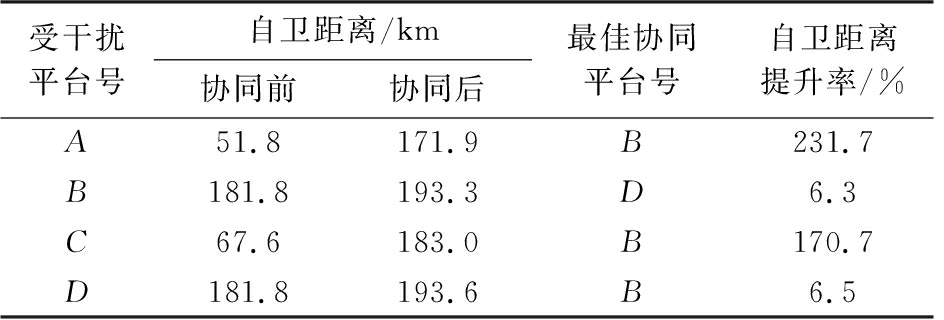
表4 编队雷达平均自卫距离汇总 (干扰机距编队中心100 km)
场景2:编队呈菱形队形向正北方向航行,平台 A / C 所辖雷达2,平台 B / D 所辖雷达1,舰舰间距20 km,简化起见,编队中心设为坐标原点(0,0),干扰功率谱密度-30 dBW/Hz,其他参数设置均如表2所示,编队各受干扰雷达的平均自卫距离提升率如表5、表6所示。
表5 编队雷达平均自卫距离汇总 (干扰机距编队中心200 km)
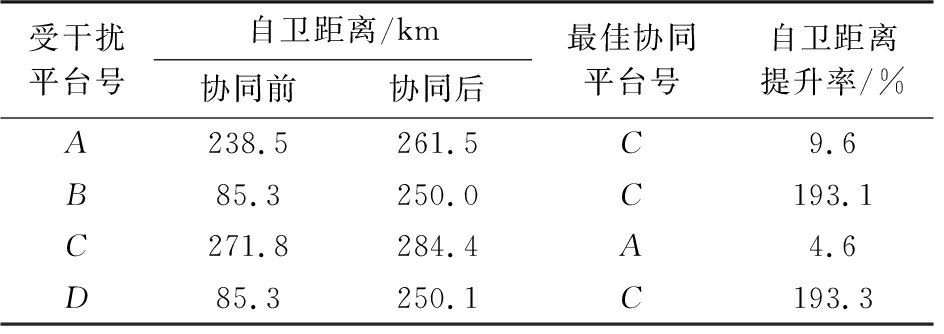
表6 编队雷达平均自卫距离汇总 (干扰机距编队中心100 km)
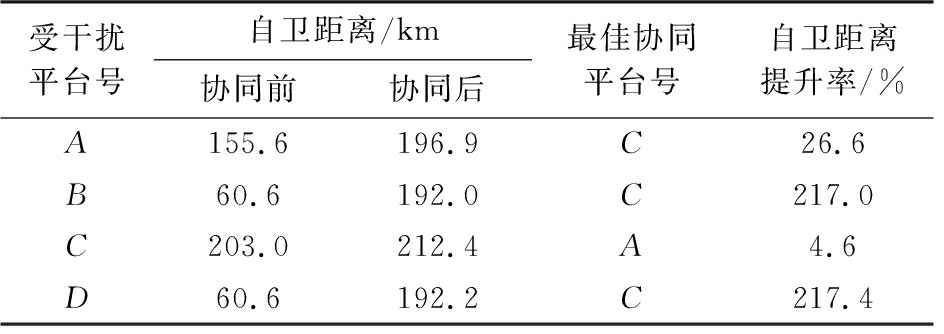
从表5、表6可以得到以下结论:
1) 编队在受到噪声压制干扰的情形下,通过合理选择编队内协同平台,对自身受干扰雷达的自卫距离均有不同程度上的提升;
2) 由于雷达2比雷达1正常作用距离远,且具有副瓣对消措施,对雷达1自卫距离的提升有明显的改善效果;
3) 干扰机距编队越近,通过协同方式得到的平均自卫距离增益越明显。
为了提高现代海战场条件下编队雷达网系统的防御能力,本文立足海上舰艇编队抗干扰效能,研究了典型单雷达电子对抗过程和模型,给出了编队实时协同抗干扰雷达选择指标和依据,对噪声压制干扰情形下的编队抗干扰增益进行了量化分析,仿真表明,本文提出的效能评估指标科学、合理。但是,在实际的海上编队抗干扰过程中,还需要综合考虑海战场环境因素、编队作战雷达使用规则、单雷达设备抗干扰能力等一系列限制因素,这方面有待进一步研究。
参考文献 :
[1] 夏辉. 美军舰载电子战飞机综述[J]. 电子信息对抗技术, 2014, 29(6):19-22.
[2] 赵国庆. 雷达对抗原理[M]. 2版. 西安: 西安电子科技大学出版社, 2012.
[3] 贺志强,赵锋,赵帮绪,等. 噪声干扰下雷达目标检测概率计算模型研究[J]. 现代防御技术, 2012, 40(1):119-123,136.
[4] 罗鹏程,杨涛. 对空警戒雷达网抗干扰效能模型[J]. 火力与指挥控制, 2010, 35(7):57-61.
[5] 张冰,吕月. 雷达组网系统抗干扰设计研究[J]. 江苏科技大学学报(自然科学版), 2010, 24(5):475-479.
[6] 雷鸣,李丹,崔鹏,等. 基于遗传算法的雷达管控问题[J]. 火力与指挥控制, 2014, 39(11):105-109.
[7] 雷中原. 有源雷达与无源雷达协同抗干扰部署优化模型研究[J]. 军事运筹与系统工程, 2016,30(2):20-25.
PAN Hao, SUN Jianjun, LIU Qin
( Xi ’ an Research Institute of Navigation Technology , Xi ’ an 710068, China )
Abstract : Aiming at the problem of the naval fleet radar network suffering from noise suppressing jamming, the dynamic process of single radar anti-jamming is discussed firstly. On this basis, the evaluation index of the radar network average self-defense distance is given. The characteristic of space diversity is used fully and the best radar plots are set up in real-time. Finally, the effectiveness of the algorithm is verified by simulation experiment. The result demonstrates that the detection range of naval fleet radar network in noise jamming environment can be improved using the proposed method on the premise that the single radar has CFAR ability. The method may offer a guide for naval fleet radar control in wartime and formation plan in pre-wartime.
Key words : naval fleet; radar network; collaborative; analysis on efficiency; suppressing jamming
修回日期: 2017-11-13
DOI: 10.3969/j.issn.1672-2337.2018.04.005
收稿日期: 2017-10-09;
文献标志码: A
文章编号: 1672-2337(2018)04-0378-05
作者简介 :
中图分类号 : TN958; TN973

潘 浩 男,1989年生,陕西宝鸡人,工程师,主要从事雷达组网协同探测、协同抗干扰技术研究。
E-mail: panhao606@163.com
孙建军 男,1982年生,陕西榆林人,硕士,主要从事编队信息系统总体技术、多平台复合跟踪与信息融合技术研究。
刘 钦 女,1984年生,陕西咸阳人,博士,主要从事多传感器协同检测与跟踪技术研究。