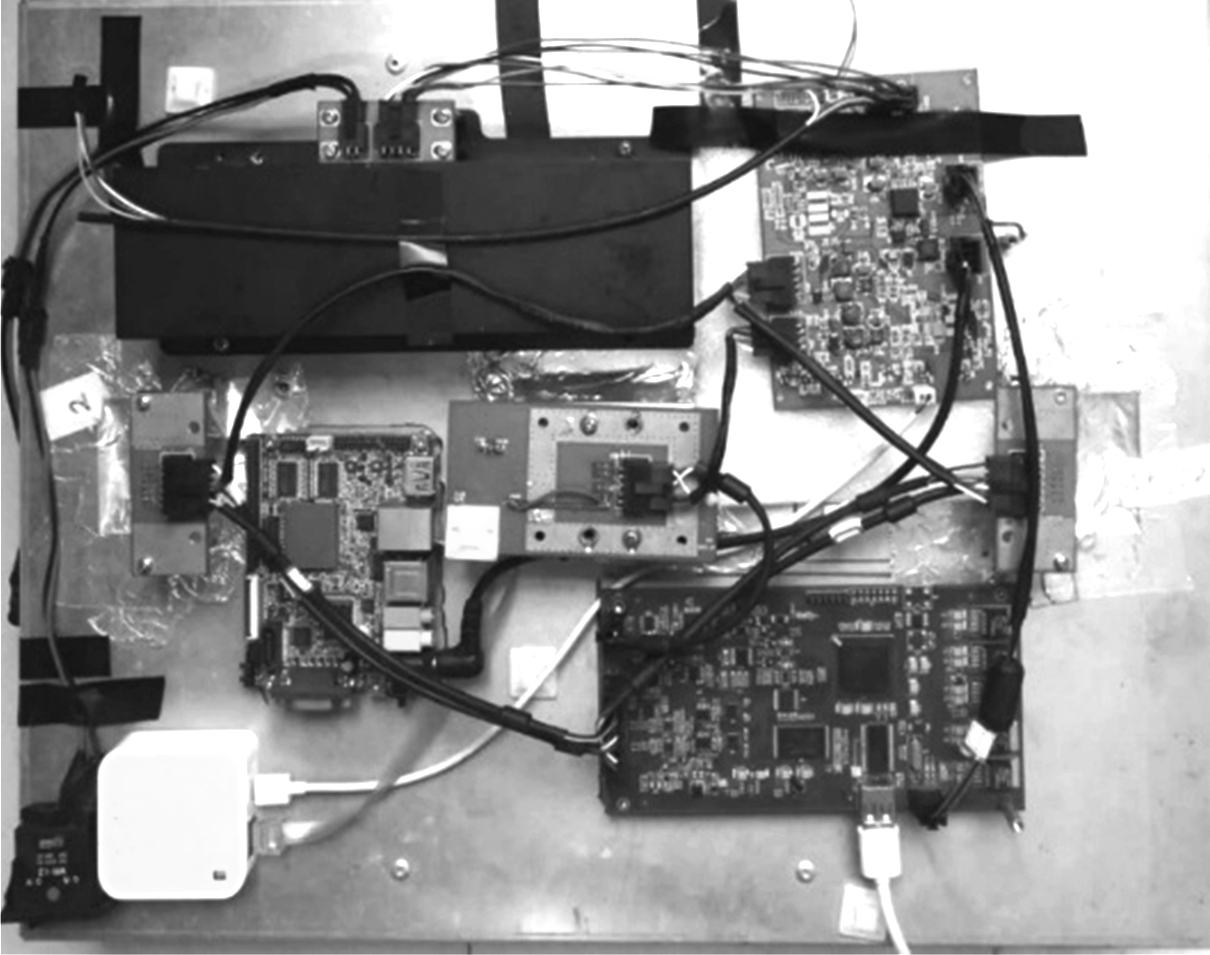
(a) 雷达系统实物图
穿墙雷达用于探测墙体及其他非电磁透明障碍物后动目标位置,能够改善探测现场实时感知能力,运动目标检测是穿墙雷达领域的研究热点之一[1]。在反恐、军事作战、灾后救援等方面具有重要的作用[2-5]。穿墙雷达具有良好的穿透能力且不易受到天气、温度、湿度等实际自然因素的影响。穿墙雷达历经多年的发展,已经形成调频连续波体制(FMCW)、步进频连续波体制(SFCW)以及冲激脉冲体制(IR)。调频连续波信号通过距离压缩可以获得较高的距离和速度分辨率,但经典调频连续波信号脉冲压缩后旁瓣电平输出较高,会模糊甚至淹没邻近的弱目标。步进频连续波信号通过调节发射信号的频率扩展系统带宽,进而得到高分辨率。由于受频率选择和建立时间的限制,其数据采集时间很长,信号处理过程比较复杂,功耗较大,造价昂贵[6]。
本文针对IR-UWB穿墙雷达的动目标探测问题,首先回顾IR-UWB穿墙雷达的工作原理;其次对穿墙雷达动目标经典探测算法进行了对比研究,通过实验分别对不同运动状态下目标的回波数据进行处理,并给出了动目标探测算法的调参范围。实验结果表明,不同的动目标检测算法在探测场景存在差异的情况下存在迥异,具有特殊性。
(a) 雷达系统实物图

(b) 雷达系统组成框图
图1 雷达系统实物与系统组成框图
IR-UWB穿墙雷达实验系统组成及试验整机如图1所示。该实验系统是由中南大学航空航天学院研制的中心频率为300 MHz的IR-UWB穿墙雷达系统,主要用于穿墙探测以及灾后救援,该系统由两部分组成,一部分是雷达主机,用于实现脉冲的产生、发射、接收等功能;另一部分是计算机,主要实现参数下发、数据处理和结果输出等功能,通过USB接口与雷达主机连接。
UWB脉冲源经发射天线发射无载频单极冲激脉冲信号,接收机通过接收天线将目标回波信号送至取样变换电路,经时域变换取样得到回波信号。通过对回波信号的处理分析来提取目标的距离方位信息。IR-UWB穿墙雷达回波信号处理流程如图2所示,输入数据为采样得到的回波信号x[m,n]。首先对回波数据进行脉冲积累,由于穿墙探测中信号经过墙体的双程穿透衰减,得到的目标信息较为微弱,需要对脉冲积累后的数据作降噪处理,进一步提高信噪比,最后输出降噪处理后的信号。
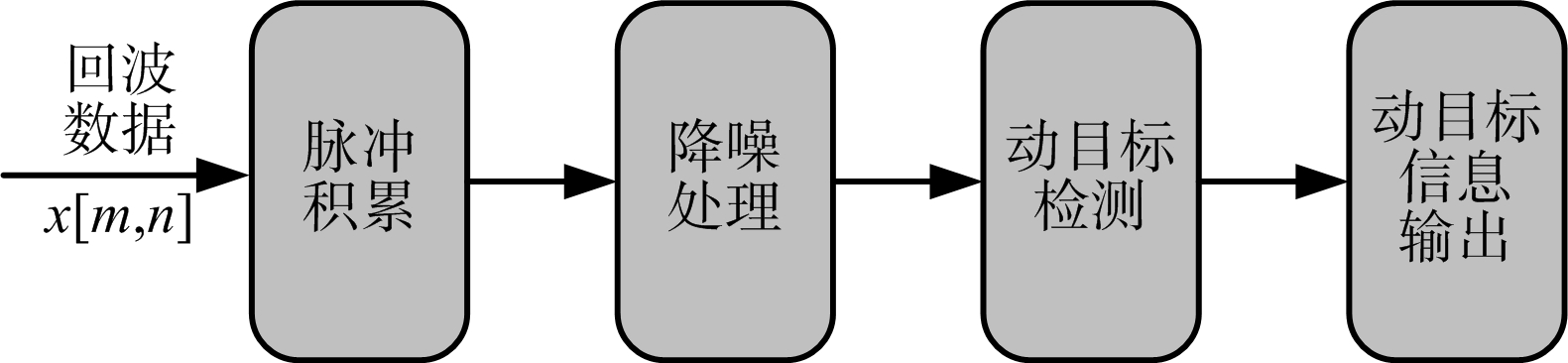
图2 穿墙雷达回波信号处理流程
在穿墙雷达对动目标的探测中,雷达系统接收的回波信号包含的背景信号较为复杂而且其能量相对动目标回波较强。用脉冲对消的方法进行动目标信号的检测,从频域的角度上看,脉冲对消法具有高通滤波器的作用,而动目标回波在频域上表现为高频分量。常见的脉冲对消法有两脉冲对消法和三脉冲对消法。用x[m,n]表示当前的回波信号,用z[m,n]表示动目标的信号,其中m表示慢时间,n表示快时间。两脉冲对消法可以表示为
z[m,n]=x[m,n]-x[m-1,n]
(1)
脉冲对消法是对慢时间数据序列执行一个线性滤波处理,以抑制数据中的杂波分量 [7]。利用脉冲对消法,可以抑制静止背景杂波,保留动目标回波,提高信噪比。
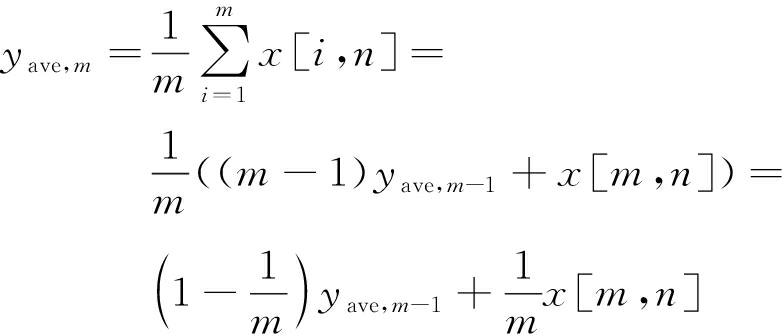
积累平均背景相消法是穿墙雷达抑制杂波的常见方法之一,广泛应用于动目标检测。其原理是根据回波信号对所探测的区域进行背景估计,然后在当前次的回波数据中减去背景估计信息。用y[m,n]表示历史回波信号的背景估计值,其中m,n定义与2.1节一致。可以得到

(2)
那么动目标的回波信息可以表示为
z[m,n]=
(3)
实际上,使用积累平均背景相消法在理论上是准确度最高的背景均值估计算法,但是按照式(3)分析,该算法只能事后处理,不具有在线实时处理的能力,同时也对雷达数据处理设备的存储容量提出了较高的要求。为了使该算法具有实时处理能力,同时减小其对存储容量的要求,改写式(2),使得兼顾实时性的同时解决存储数据大的问题:
(4)
m时刻背景均值估计由m-1时刻的背景均值估计和m时刻的回波数据递归得到。随着探测时间的积累,该算法的背景估计值精度随之增高。但是对于探测场景中背景出现起伏的情况下,更新背景速度缓慢。这是由于在该算法中每个回波的权重值一样,无法重点突出最新回波数据,使得当前的回波数据对整个背景估计值影响贡献小,导致出现拖尾现象。
指数加权法又称为指数平均法[8],其背景估计值:
y[m,n]=αy[m-1,n]+(1-α)x[m,n]=
y[m-1,n]+(1-α)·
(x[m,n]-y[m-1,n])=
y[m-1,n]+(1-α)z[m,n]
(5)
式中,α为指数加权因子,决定背景估计值的稳定性。背景估计值由两部分构成,一部分是先前的背景估计值,另一部分是当前的回波。动目标回波信息表示式与式(3)相同,从表达式可以看出,指数加权法具有脉冲对消法和背景相消法的特点,通过加权因子对高频变化量进行了平滑处理,因而该算法具有适应性,只要适当调节指数加权因子α可以获得最优探测结果。对于该算法,通过改写其背景估计值表示式:
y[m,n]=(1-α)x[m,n]+αy[m-1,n]=
(1-α)(x[m,n]+αx[m-1,n]+…+
α2x[2,n])+αm-1y[1,n]
(6)
可以知道,当回波数目逐渐增加的时候,该算法对于当前波数据的权重较大,对于较早之前的回波数据的权重越来越小。这使得其对于起伏背景情况下可以较快地更新背景信息。
基于上文所述的动目标检测算法以及穿墙雷达信号处理流程,利用本实验室自主研制的IR-UWB穿墙雷达实验系统,设计了穿墙雷达探测实验。
开展穿墙雷达探测实验的目的主要有两个:1) 探究指数加权法中加权因子α的取值对实验结果的影响,并给出最优探测结果时α的取值范围;2) 验证几种常见的动目标检测算法在不同运动状态下的检测性能。
实验方案如下:
第1步:通过计算机录取目标在各种运动状态下的回波数据。针对指数加权法,通过改变其加权因子α的值,改善其检测结果,给出最优探测结果下α的取值范围。
第2步:在第1步录取的数据上,采用本文所述的几种动目标检测算法进行处理,验证动目标检测算法的性能。实验数据的处理结果以距离历史图表示,横坐标表示距离维(单位为m),纵坐标表示慢时间维(单位为s)。
实验场景如图3所示,探测区域是中南大学某空旷广场,墙体是厚度为30 cm的砖混结构。在实验中目标运动状态分为原地踏步、径向运动(即沿雷达视线方向行进运动)和切向运动(即垂直于雷达视线方向行进运动)。
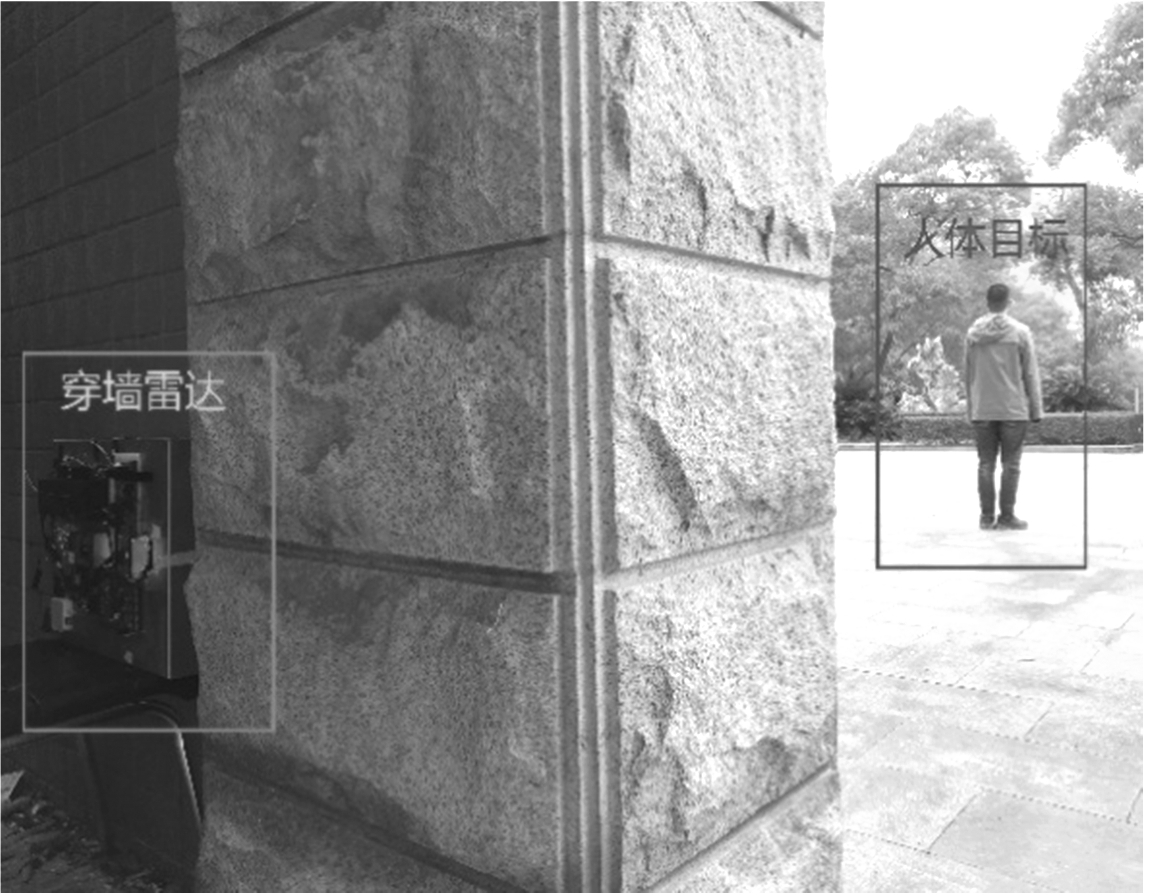
图3 实验场景图
针对指数加权法,使用了不同运动状态下的实测数据,数据录取时长约为60 s。为了探究加权因子α对检测性能的影响,引入文献[9]中所提到的杂波抑制性能指标SCNR(信号与杂波、噪声功率比),该指标数值越大,意味着探测性能越好。通过对回波数据的处理,结果如图4所示。可以看出,对于切向运动状态下,指数加权法的目标探测性能随着α改变而改变,当α值在[0.5,0.9]范围时,SCNR值逐步上升,故其探测性能逐步提高;对于径向运动状态下,当α值增大时,SCNR值随之下降,则其探测性能逐步下降。综上考虑,为了使得指数加权法能在探测中具有良好性能,可将α取值范围设为[0.75,0.85]。在下一步的实验中,指数加权法中参数α值为0.8。
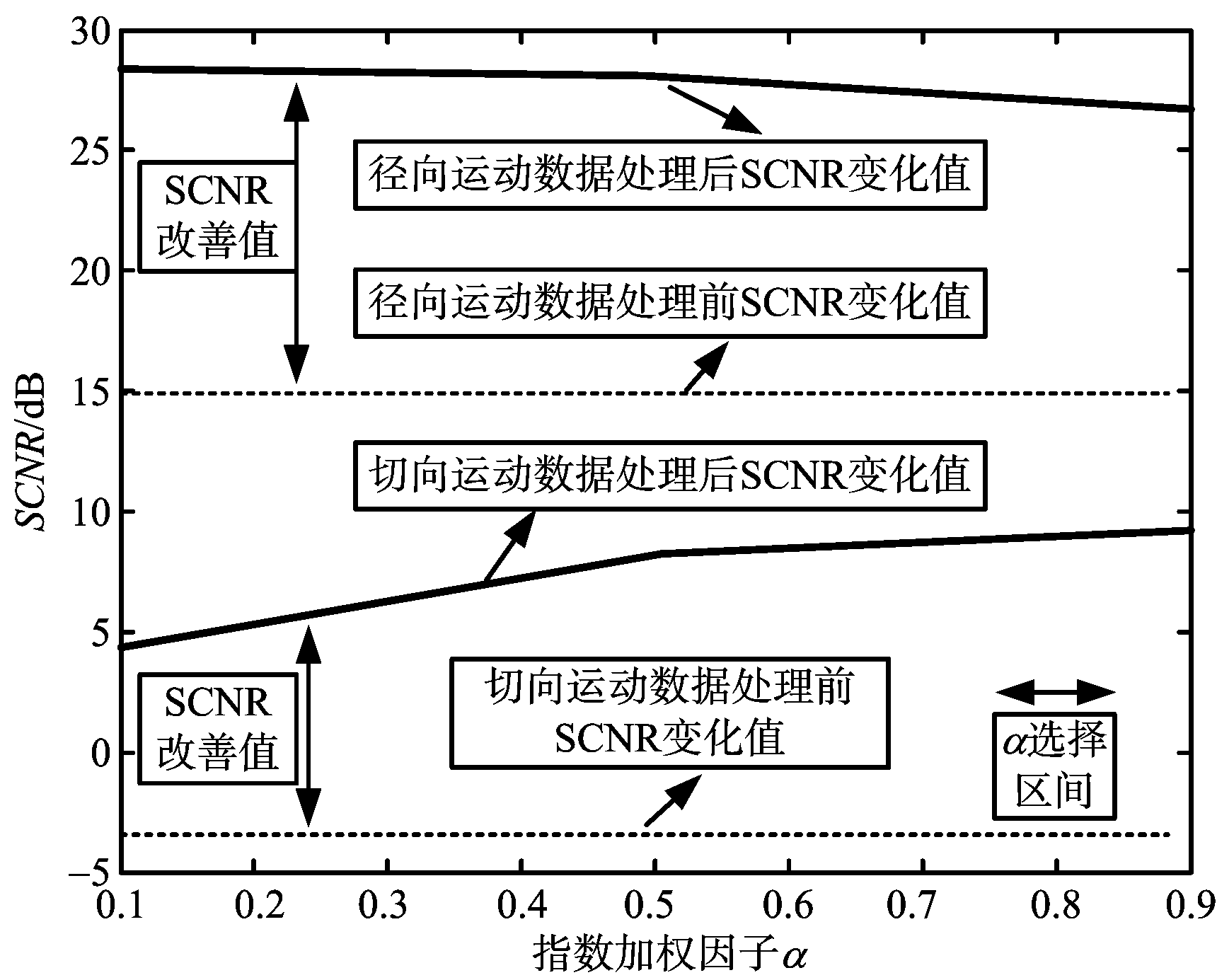
图4 指数加权因子对SCNR的影响
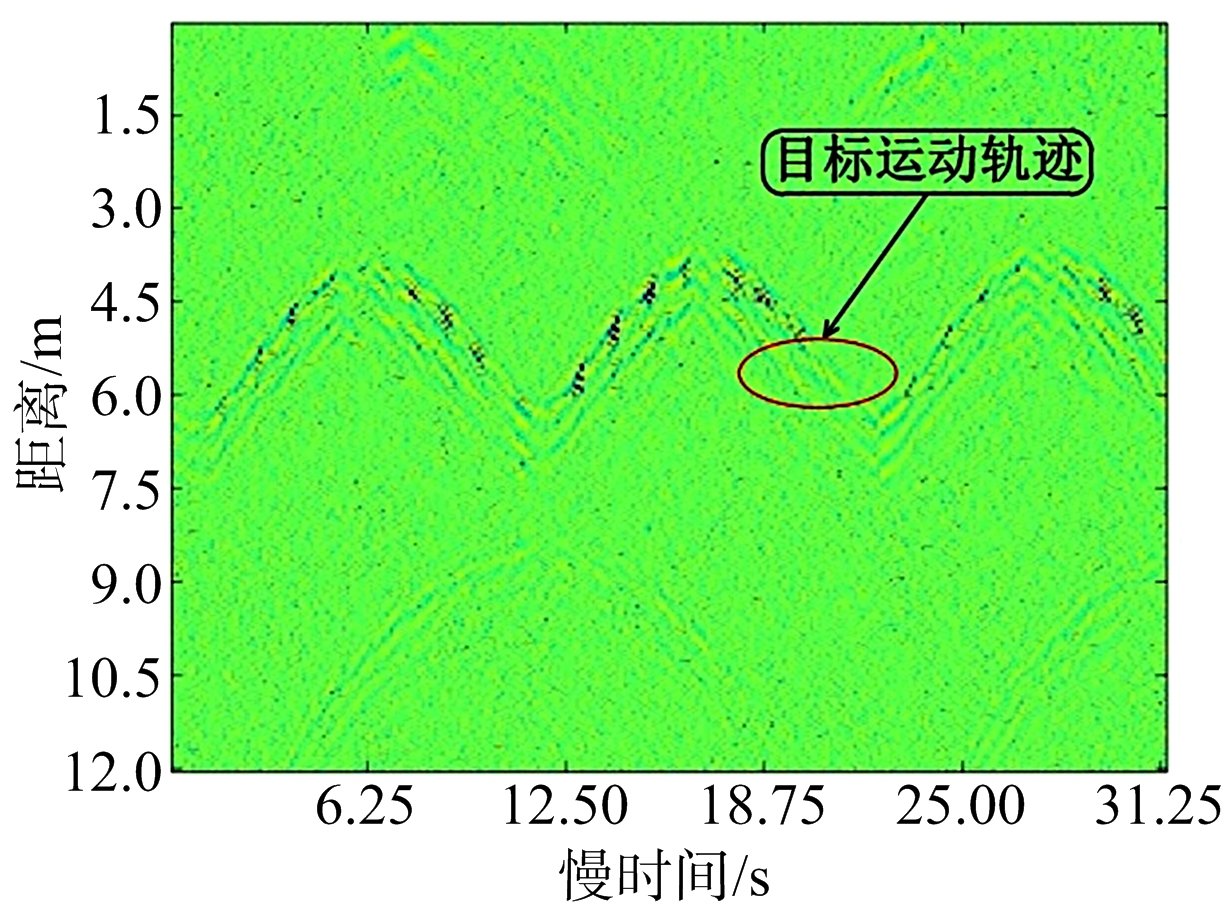
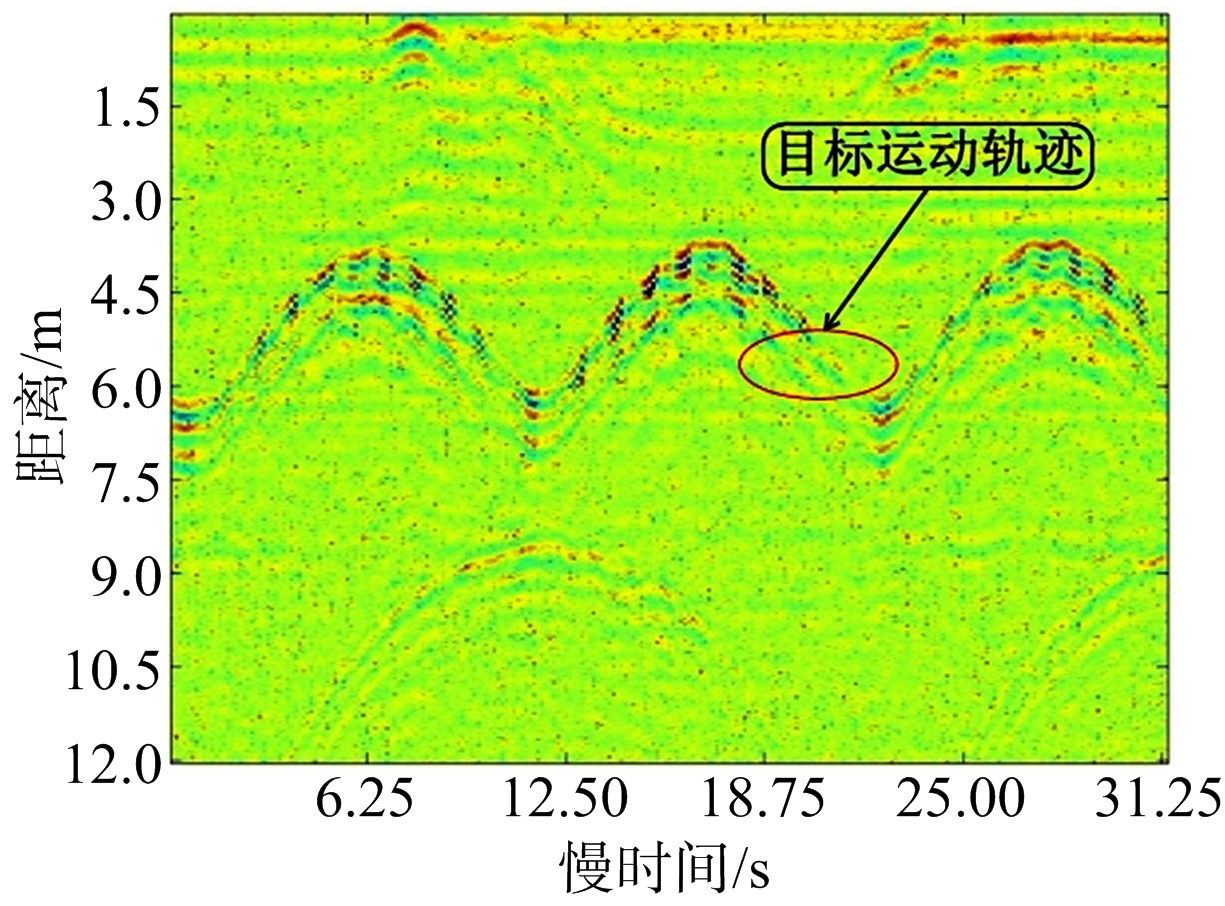
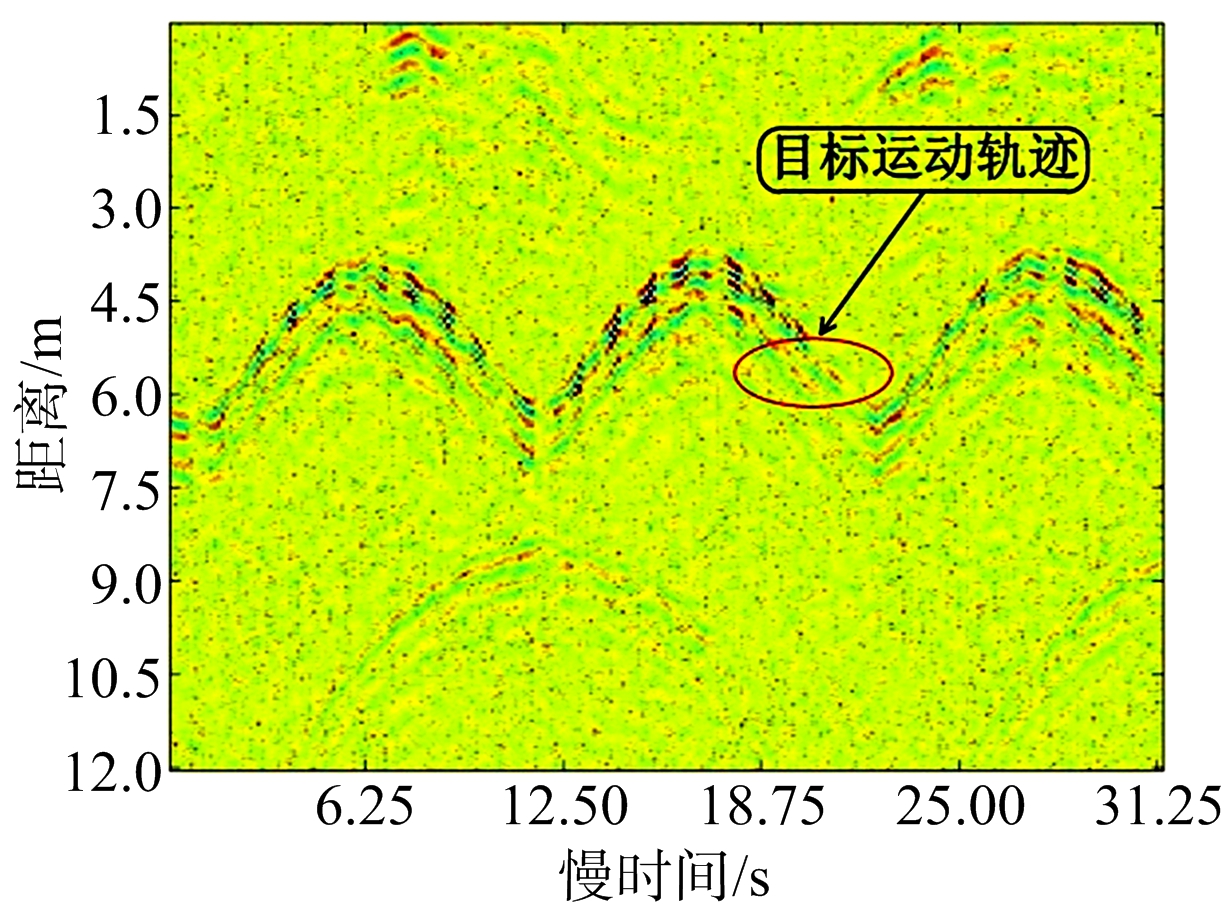
图5是对于目标作径向运动时的提取距离历史。此时距离历史是由4段斜率相近的折线构成,说明目标运动速度变化一致,与实际运动状态相符。从图中可以分析,目标在6.25 s左右时间里向雷达靠近,而后远离雷达。目标在运动期间,3种算法对于大部分的路径反演性能较好。但是目标转身反向时脉冲对消法在目标转身处的轨迹出现丢失。这是因为脉冲对消法属于高阶算法,目标在转身时处于短暂静止的状态,此时刻的目标回波被该算法当成了静态背景滤去。
(a) 脉冲对消法
(b) 积累平均背景相消法
(c) 指数加权法
图5 3种算法提取的目标径向运动距离历史
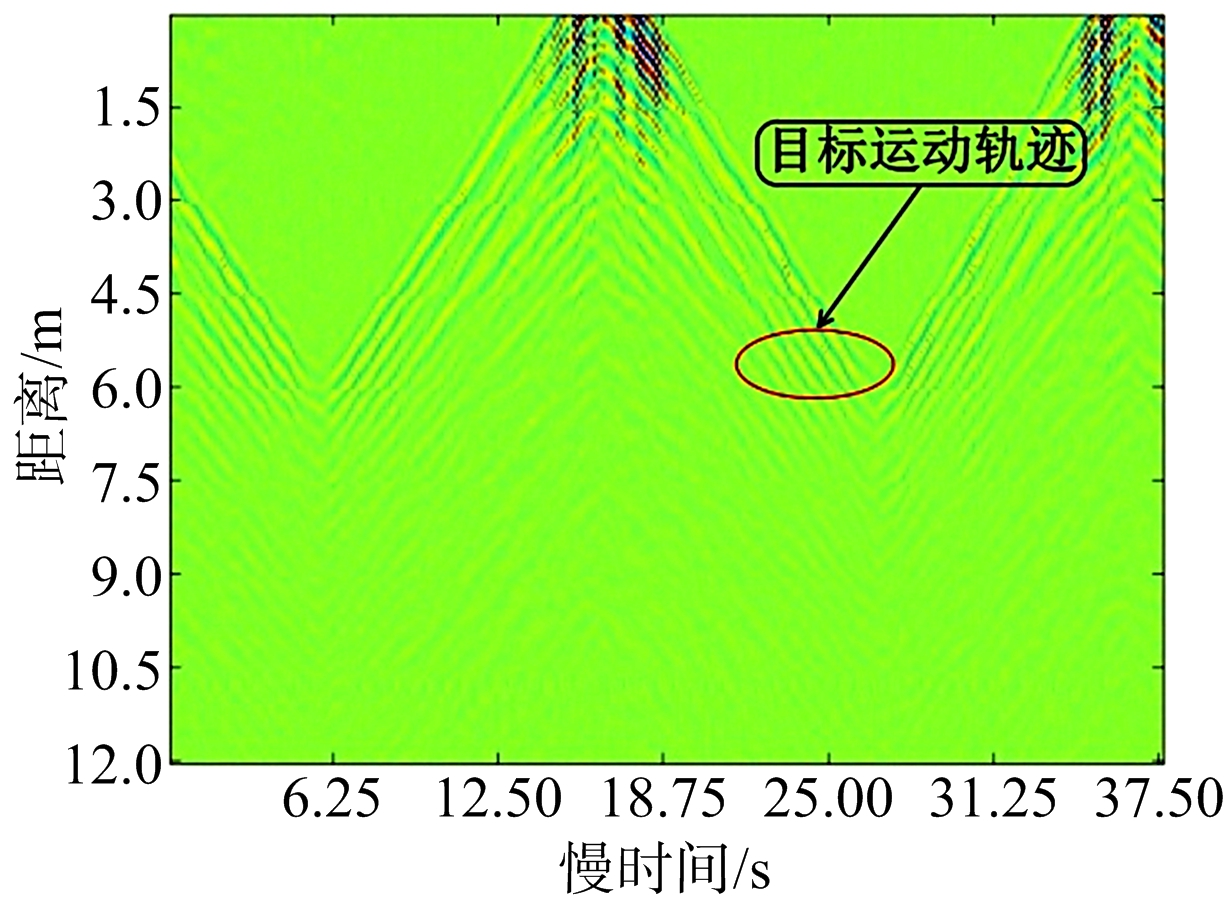
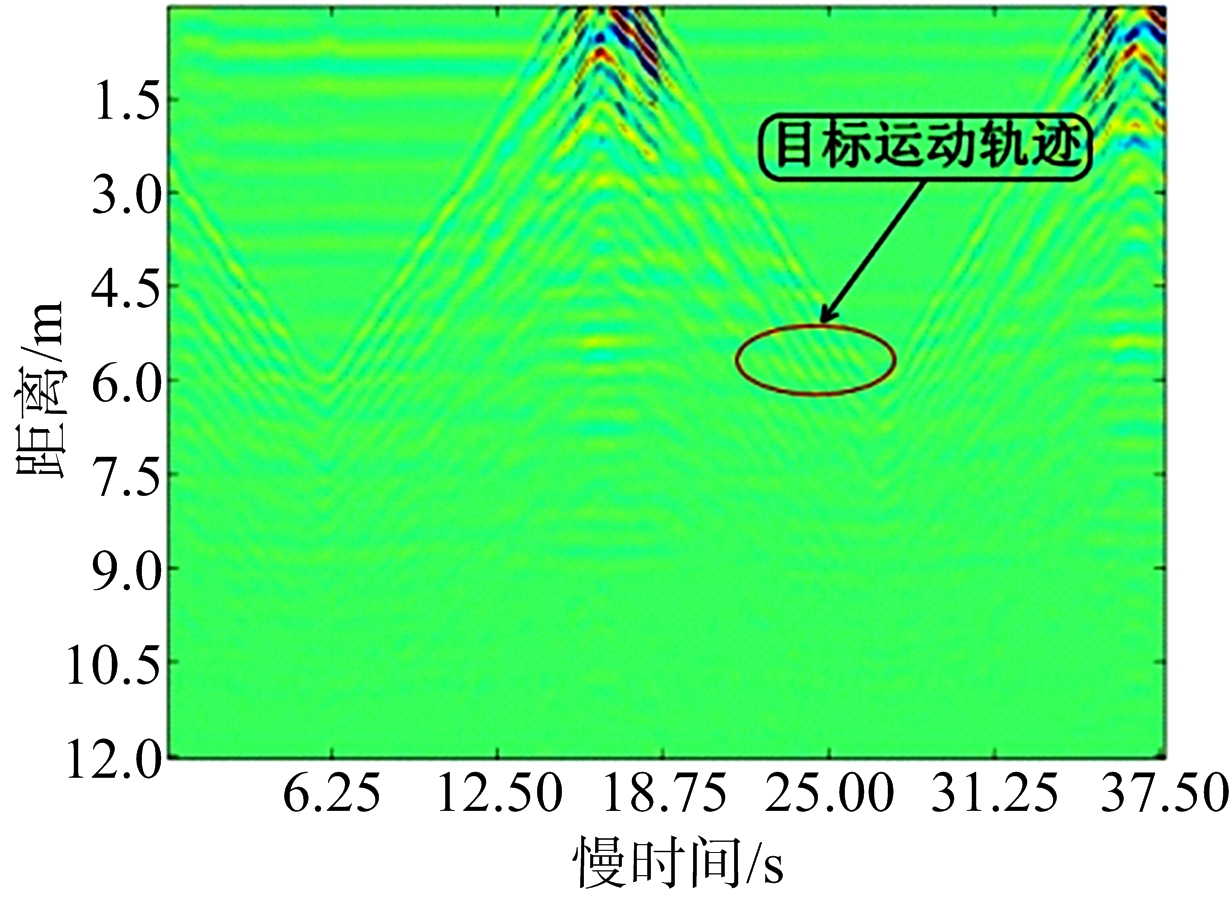
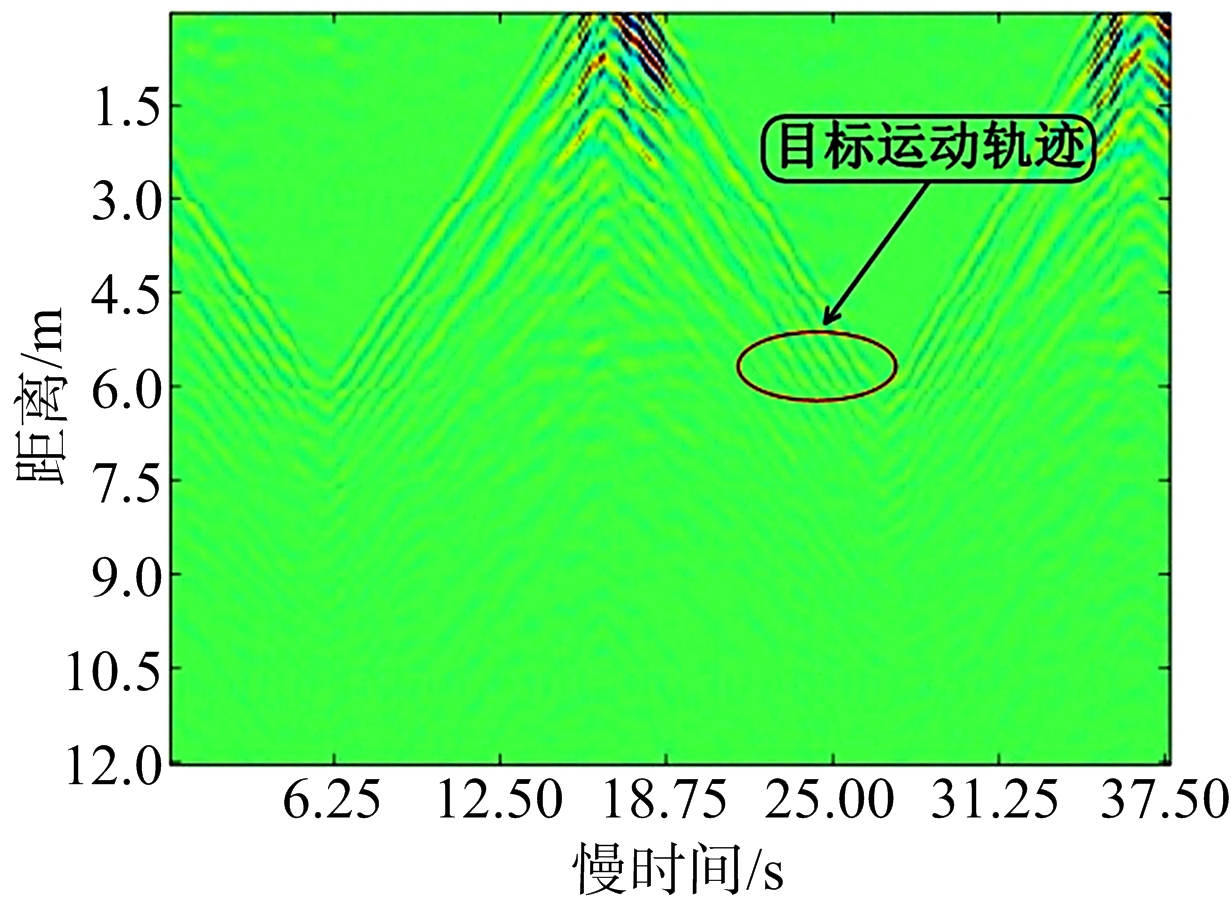
图6是目标作切向运动时的提取距离历史。从图像中可以分析得到,其距离历史由多段弧线衔接而成,其曲率弯曲程度与目标的运动速度有关,圆弧的顶点表示目标与雷达距离最近。脉冲对消法对于目标切向运动轨迹显示较为模糊。积累平均背景对消算法与指数加权法在目标作切向运动时,可以较为清晰地看出目标所走的轨迹,但是由于积累平均算法自身的缺陷,在探测背景发生起伏时带有一定的拖尾,而指数加权法具有较好的背景起伏适应能力。
(a) 脉冲对消法
(b) 积累平均背景相消法
(c) 指数加权法
图6 3种算法提取的目标切向运动距离历史

(a) 积累平均背景相消法
(b) 指数加权法
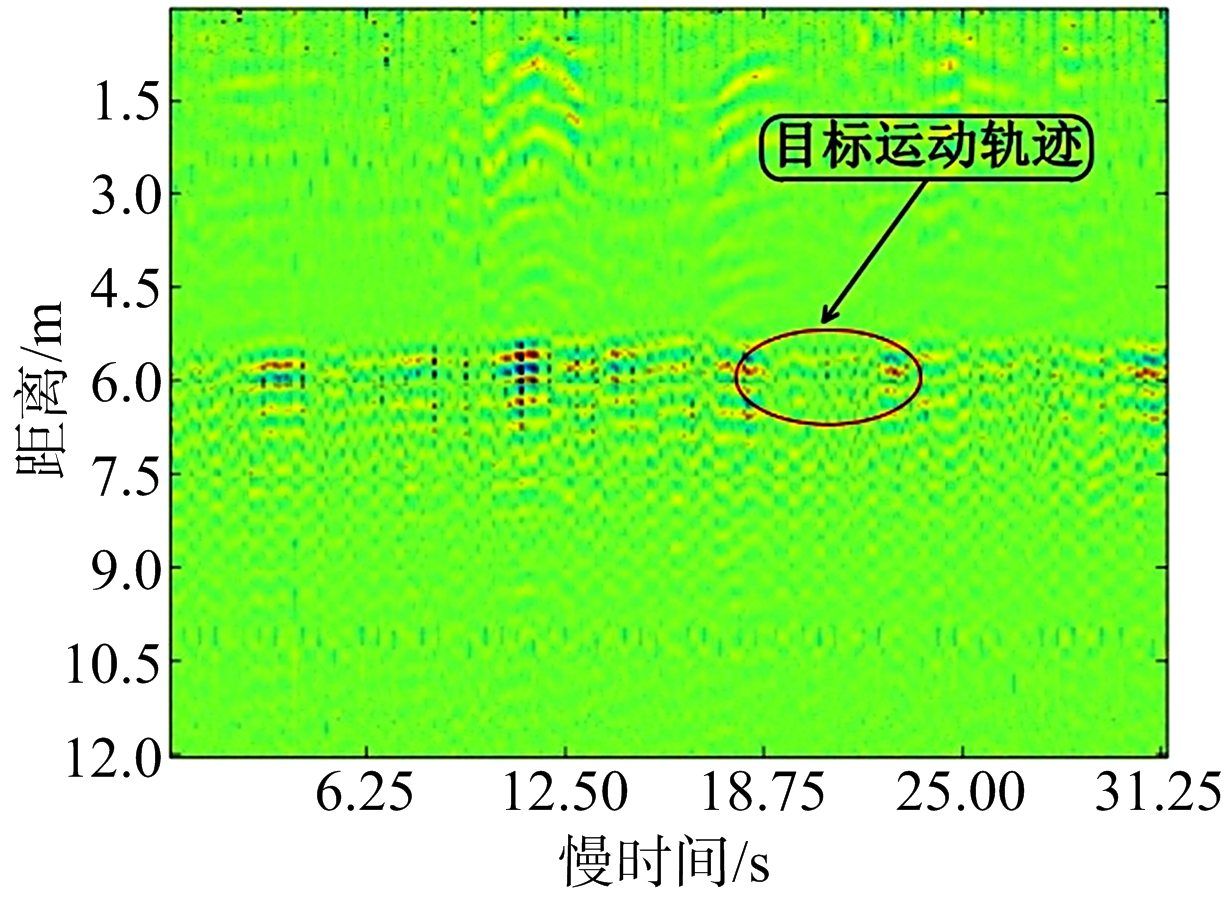
图7 两种算法提取的目标原地踏步距离历史
图5、图6结果表明,指数加权法、脉冲对消法和积累背景平均法可以有效检测径向运动状态的目标,但是对于切向运动目标的检测,指数加权法、积累背景平均法检测性能较好。因此,利用指数加权法、积累平均背景相消法对原地踏步状态的回波数据进行处理,提取结果如图7所示,在原地踏步的情况下,目标呈现的距离历史大致为一条直线,且断断续续,这是因为人体的呼吸心跳存在所造成的。在距离维具有一定的起伏,则是因为原地踏步时手的摆动和腿的运动而产生的。
本文针对IR-UWB穿墙雷达对动目标的探测问题,分析回顾了IR-UWB穿墙雷达3种不同的动目标检测算法,并利用自行研制的IR-UWB穿墙雷达进行穿墙探测实验。分析了动目标在不同运动状态下的实验数据,以距离历史图给出了实验结果。结果表明,对于指数加权法而言,α取值在[0.75,0.85]范围内,对径向运动、切向运动的探测性能有较大的改善;对于作径向运动的目标,脉冲对消法、指数对消法与积累平均背景对消法都表现出较好的探测性能,但是脉冲对消法在转向时出现目标轨迹丢失;而对于目标切向运动、原地踏步时,指数对消法与积累平均背景对消法具有较好的检测能力。
[1] BEKTAS H O, OZDEMIR O, ORHAN M,et al. An Experimental Investigation of F-K Migration and SAR Algorithm Using Beam Space MUSIC for UWB Through-the-Wall Imaging[C]∥ IEEE Radar Methods and Systems Workshop, Kiev, Ukraine: IEEE, 2016:70-75.
[2] WU Shiyou, TAN Kai, XIA Zhenghuan, et al. Improved Human Respiration Detection Method via Ultra-Wideband Radar in Through-Wall or Other Similar Conditions [J]. IET Radar, Sonar and Navigation, 2016, 10(3):468-476.
[3] LAVIADA J, ARBOLEYA A, L PEZ-GAYARRE F, et al. Broadband Synthetic Aperture Scanning System for Three-Dimensional Through-the-Wall Inspection [J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(1):97-101.
PEZ-GAYARRE F, et al. Broadband Synthetic Aperture Scanning System for Three-Dimensional Through-the-Wall Inspection [J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(1):97-101.
[4] YEKTAKHAH B, SARABANDI K. All-Directions Through-the-Wall Radar Imaging Using a Small Number of Moving Transceivers [J]. IEEE Trans on Geoscience and Remote Sensing,2016,54(11):6415-6428.
[5] ZHANG Yu, XIA Tian. In-Wall Clutter Suppression Based on Low-Rank and Sparse Representation for Through-the-Wall Radar [J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(5):671-675.
[6] 郝金双. Ir-UWB雷达信号重构与检测技术研究[D]. 合肥: 中国科学技术大学, 2012.
[7] RICHARDS M A. 雷达信号处理基础[M]. 2版. 邢孟道,王彤,李真芳,等译. 北京: 电子工业出版社, 2017:175-177.
[8] ZETIK R, CRABBEB S, KRAJNAKC J, et al. Detection and Localization of Persons Behind Obstacles Using M-Sequence Through-the-Wall Radar[C]∥Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense V, Kissimmee, FL: SPIE, 2006[62010I]:1-12.
[9] 贺峰. 宽带/超宽带雷达运动人体目标检测与特征提取关键技术研究[D]. 长沙: 国防科技大学,2011.

