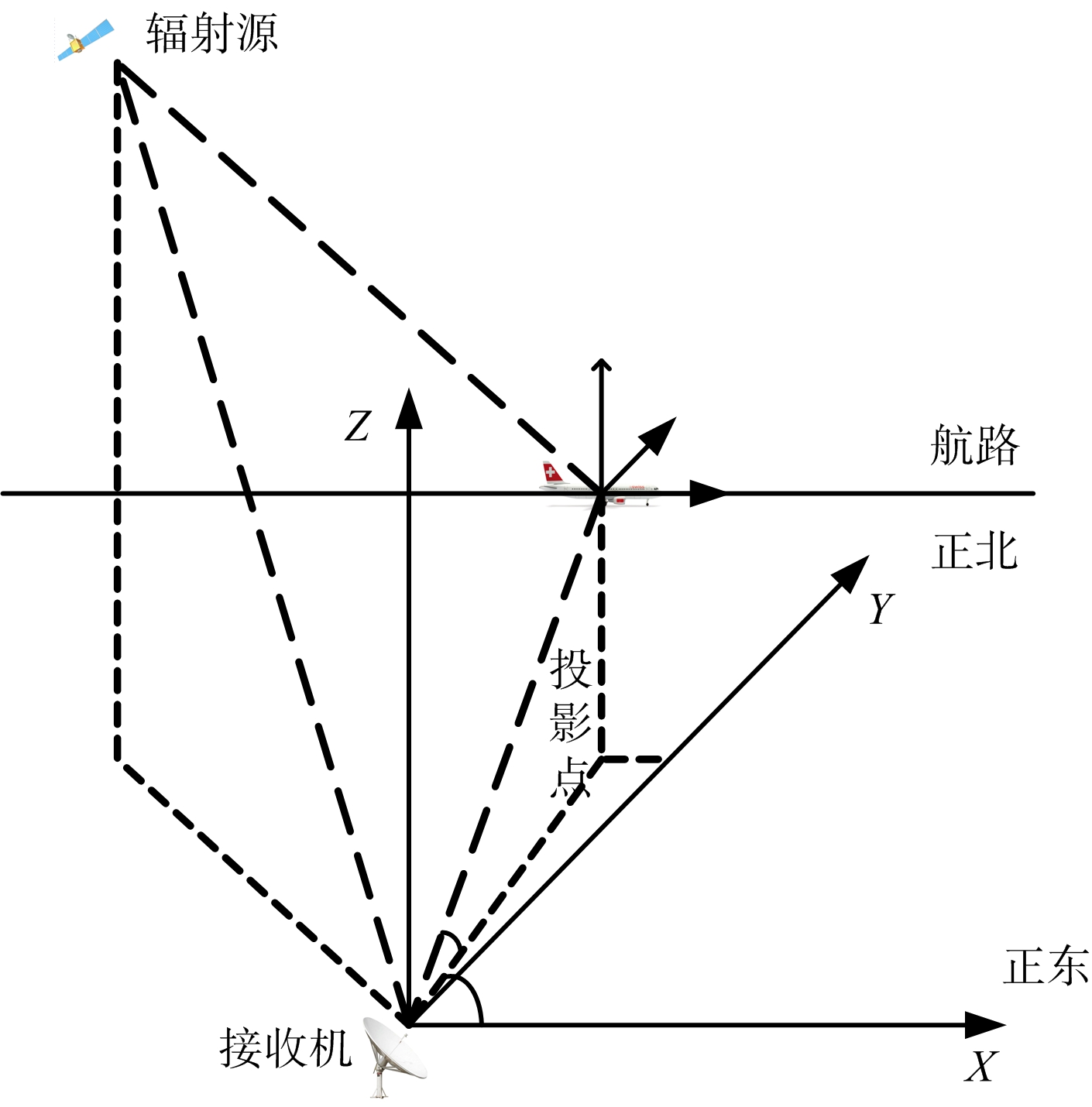
图1 被动雷达视线角示意图
雷达散射截面(RCS)反映了目标对雷达波的反射特性,是雷达探测威力评估、目标尺度信息获取和形体特征识别的重要参数。目前已有大量文献针对飞行目标的RCS特性,特别是后向RCS特性展开了广泛深入的研究。例如,文献[1]根据空气动力学原理分析了非合作目标在侧站平飞、背站拉起、对站俯冲、侧站盘旋四种航路下的飞行姿态,提出了一种非合作目标的单基地动态RCS仿真方法。文献[2]构建了GRECO和蒙特卡罗仿真为基础的动目标RCS仿真分析平台,对姿态扰动情况下目标动态RCS分布特性进行了研究。文献[3]仿真了不同运动特征、不同频段、不同极化下的目标动态RCS,分析了极化响应和频率响应特性对动态RCS的影响。
上述文献主要探讨飞行目标的后向RCS特性,其结论适用于单基地雷达系统的性能分析与设计。但对于多基地雷达,更感兴趣的是目标的非后向RCS特性,以及RCS起伏特性对双基地雷达探测范围、已有辐射源利用、雷达布站等方面的影响。目前不少学者已开始这方面的研究。例如,文献[4]计算了隐身目标的双基地RCS,并利用雷达方程推导了该目标的双基地雷达可探测范围。文献[5]计算了全尺寸飞机目标的全空域全极化双基地散射特性数据,统计了全极化双基地RCS起伏特性。需要指出的是,上述文献并未针对双基地雷达系统中卫星-目标-接收机几何关系对目标RCS起伏特性的影响,以及辐射源、接收机、目标航路三者位置关系对被动雷达系统性能的影响展开进一步探讨。
地面坐标系是以接收机所在位置为坐标原点,正东方向为X轴正方向,Y轴为正北方向,Z轴铅锤向上三者构成的右手直角坐标系。机体坐标系原点为飞机中心(即雷达观测目标),如图1所示,X轴正方向为平行于飞机机身轴线指向正前方,Z轴位于目标对称平面内,垂直于X轴指向飞机正上方,Y轴垂直于飞机对称平面,方向符合右手法则。同时,在飞机直线飞行时,认为飞机速度方向即飞机机体坐标系X轴正方向。被动雷达的雷达视线包括从辐射源到目标和从目标到接收机,在本文中选用的辐射源为导航卫星。考虑到飞机目标在直线飞行时,左右机翼水平,侧滚角始终为0°,为了简化模型,在本文中只考虑方位角和俯仰角。
图1 被动雷达视线角示意图
在目标直线运动时,认为飞机的速度矢量方向即飞机轴线方向(机体坐标系X轴正方向),归一化速度矢量(vx,vy,vz)与单位向量(1,0,0)之间所夹的方位角、俯仰角即机体坐标系与地面雷达坐标系之间所夹的方位偏转角ϑ和俯仰偏转角φ:
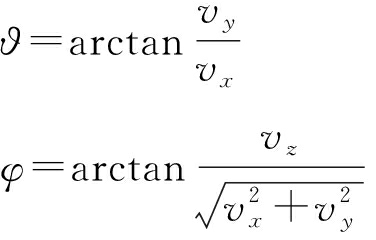
(1)
雷达视线角中方位角定义为视线在XOY平面上投影与x轴正方向的夹角,俯仰角定义为雷达视线与z轴正方向的夹角。
1.2.1 目标对接收机视线角计算
参考文献[6-7]中的方法,为简化模型,将方位角和俯仰角分开考虑。
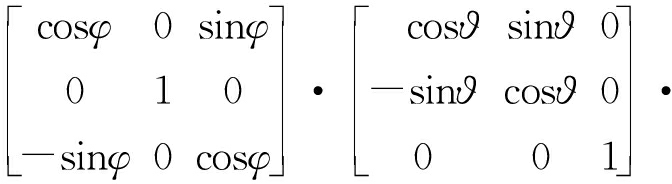
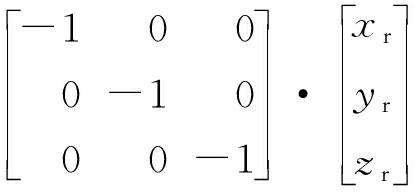
假设目标在大地坐标系中的坐标为(xr,yr,zr),按照图1所示坐标系关系,大地坐标系下M点(xrm,yrm,zrm)在机体坐标系下的坐标为(xtm,ytm,ztm):
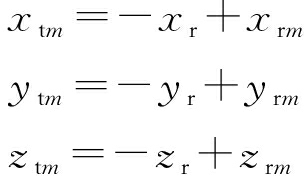
(2)
机体坐标系经过方位角偏转后M点坐标推导为
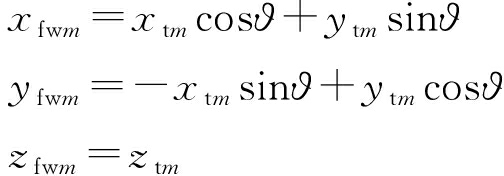
(3)
经过俯仰角偏转后,M点坐标推导为
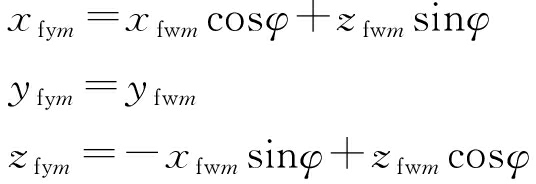
(4)
当M点为大地坐标系坐标原点时,M点在机体坐标系中的坐标为
![]()
(5)
机体坐标系下散射角的方位角为
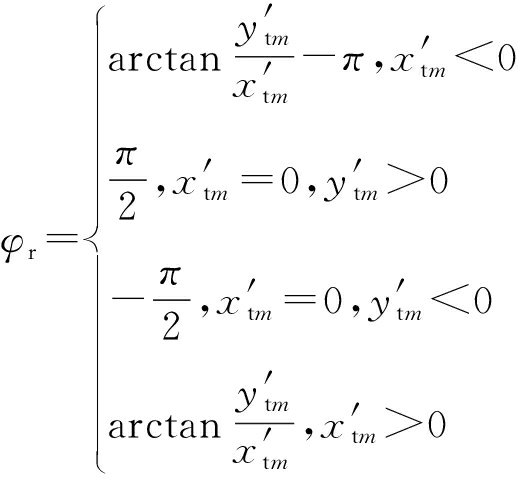
(6)
俯仰角为
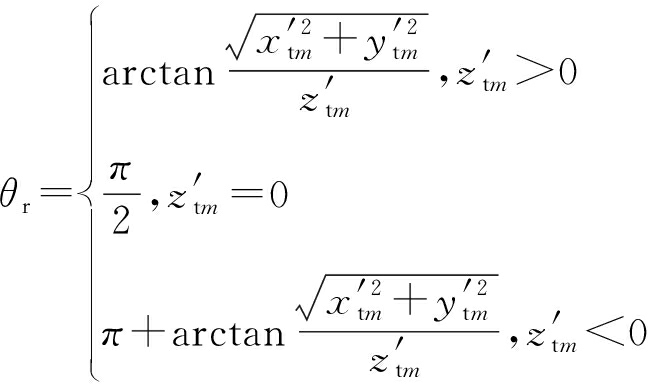
(7)
1.2.2 目标对辐射源视线角计算
目前的导航卫星系统包括GPS、北斗、伽利略和格罗纳兹四个体系,同一地点一般情况下可见卫星数在20颗以上[8]。通过读取导航卫星星历数据,可以得到当前经纬度下,大地坐标系中,导航卫星的方位角和俯仰角(方位角以正东方向为0°,顺时针为负,俯仰角是与水平面的夹角)。某地点某时刻下的导航卫星分布情况如图2所示。
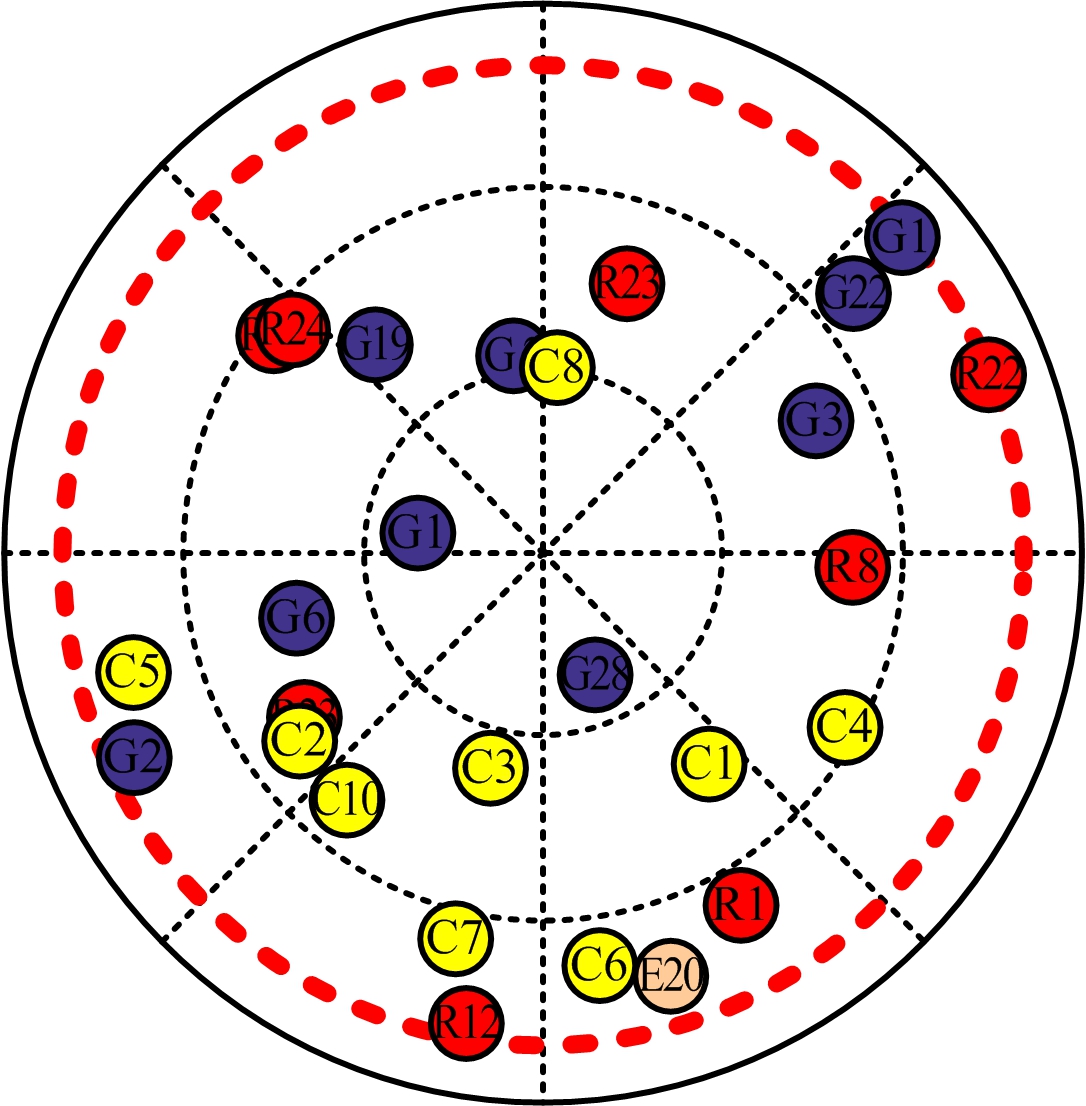
图2 导航卫星分布极坐标图
导航卫星的轨道高度一般在20 000 km左右,因此认为在一定时间内,从卫星到目标的相对位置保持不变,从目标到卫星的雷达视线角的变化仅与飞机姿态有关。
在大地坐标系下,设导航卫星的方位角为αrs,俯仰角为βrs,忽略目标和接收机之间的距离,认为未偏转前的机体坐标系和大地坐标系重合,则在偏转后机体坐标系中的方位角为
φt=αrs+ϑ
(8)
俯仰角为
θt=βrs+φ
(9)
步骤1:读取目标模型参数,设置仿真频率,仿真静态目标全空域双基地RCS。
步骤2:设置目标航路,获取目标速度矢量、位置及辐射源(卫星)相对于接收机在大地坐标系下方位角、俯仰角。
步骤3:通过坐标系变换实现姿态角解算,确定辐射源与目标视线、接收机与目标视线在机体坐标系下的方位角、俯仰角。
步骤4:根据静态目标全空域双基地RCS和辐射源与目标视线、目标与接收机视线在机体坐标系下的方位角、俯仰角计算目标设定航路下动态RCS特性。
本文中选择的仿真频率为1.5 GHz,该频率是导航卫星信号的主要频率,目标为空客A320和 F-15C型战斗机,材料为金属,采用商用软件CST进行电磁计算,采用的方法为快速多层多极子算法,以1°为间隔对目标模型进行仿真。
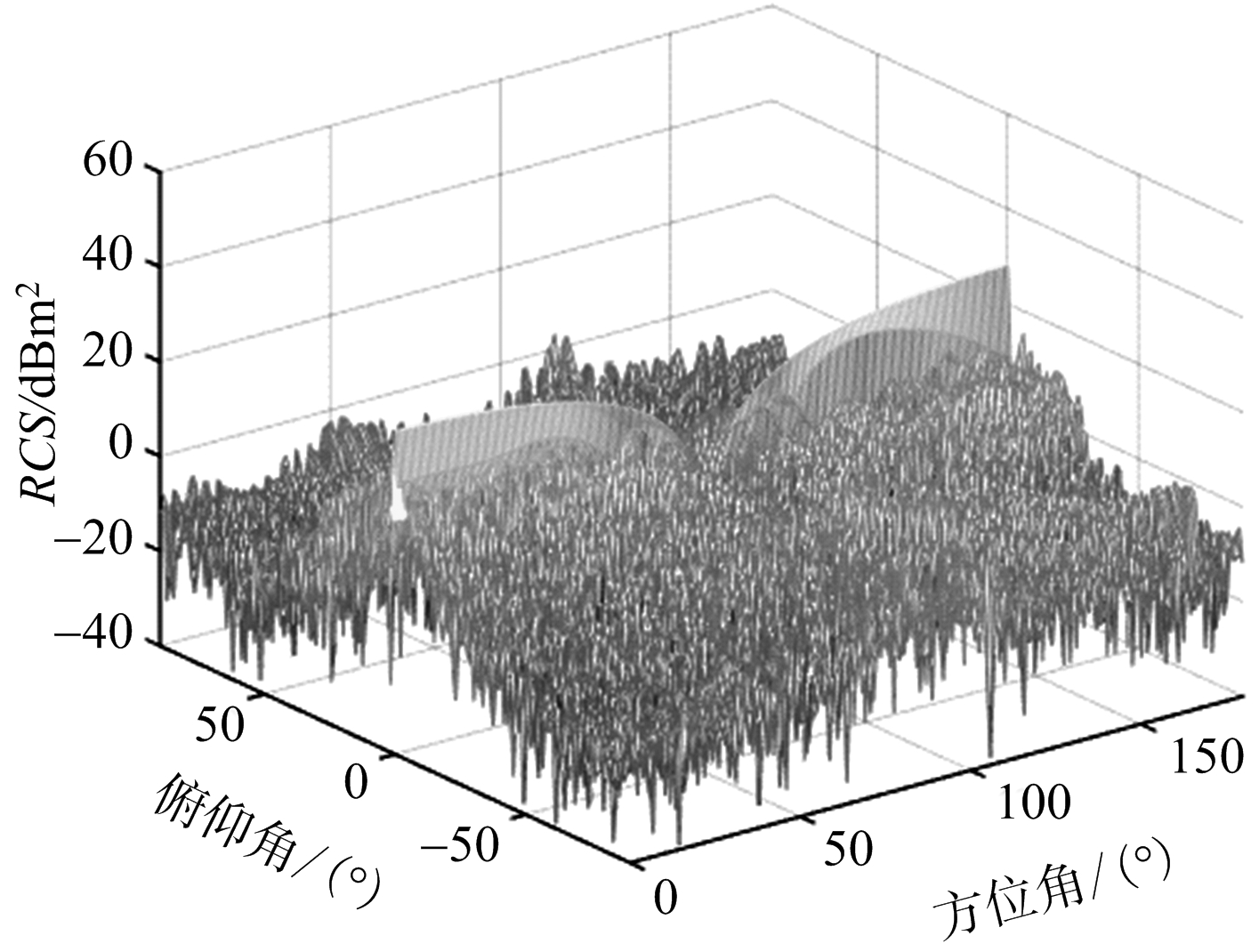
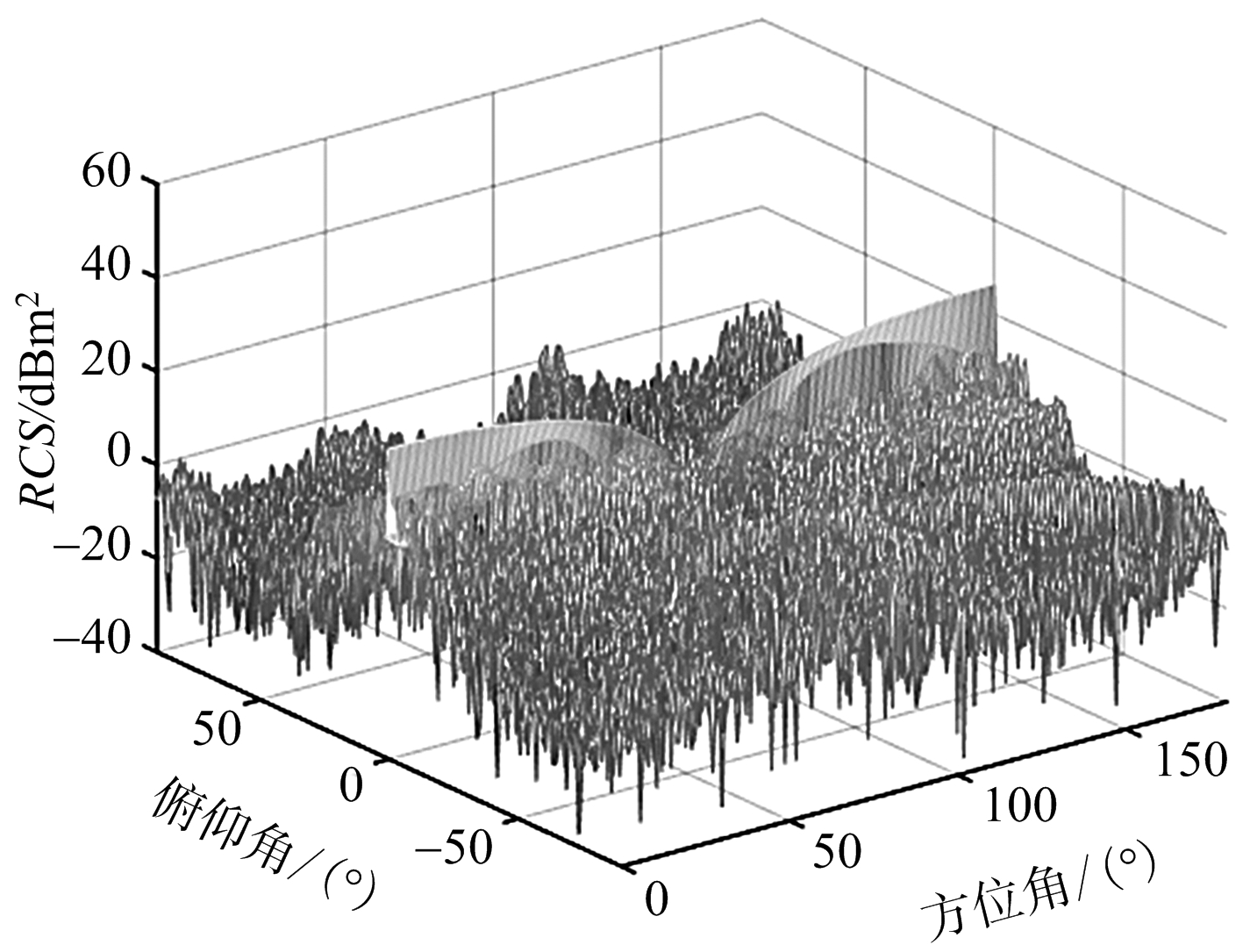
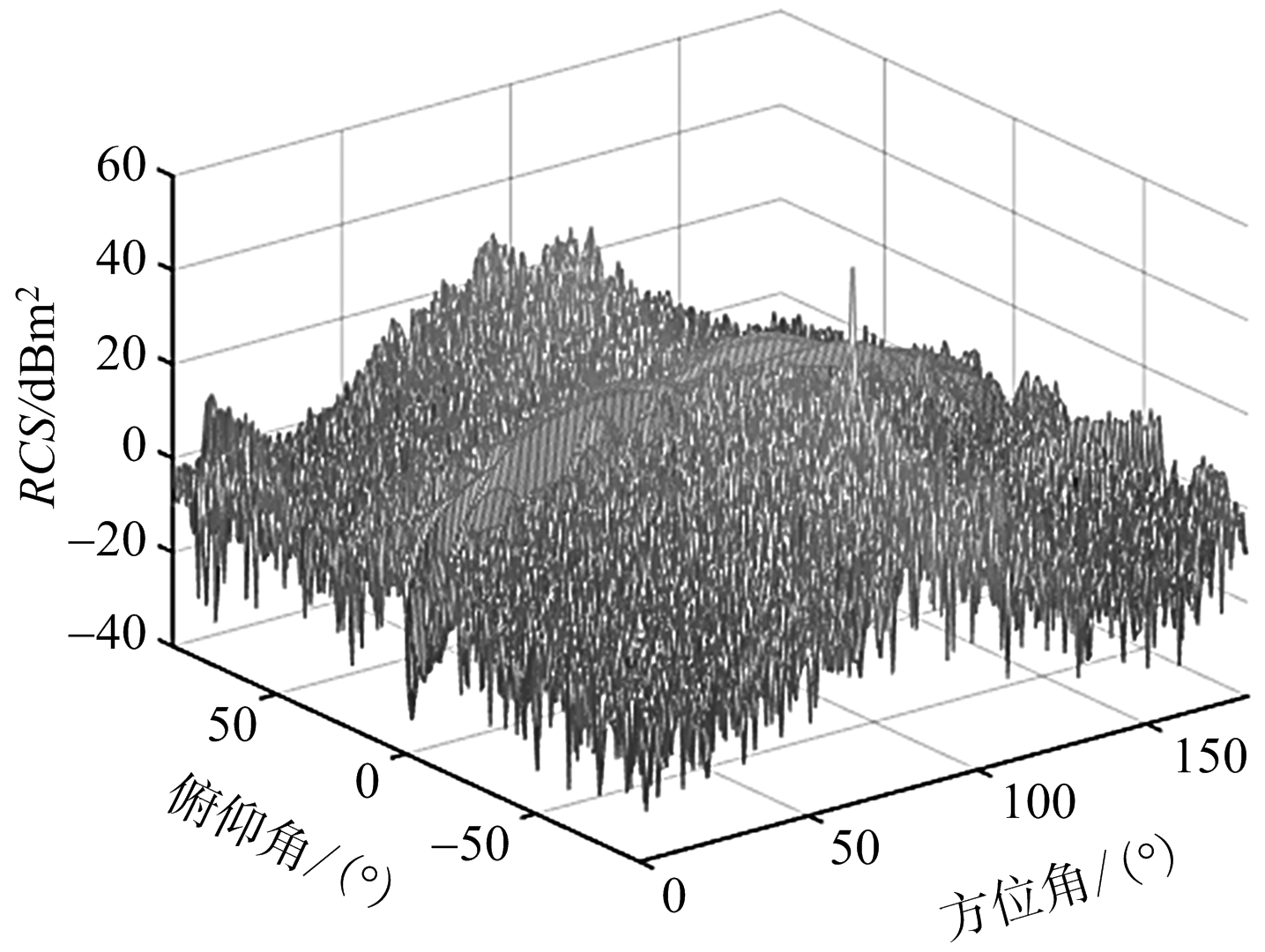
RCS仿真模型如图3所示,图3(a)为空客A320型飞机模型,图3(b)为F-15C型战斗机模型。以目标到接收机的雷达视线方位角为90°、俯仰角为125°为例,4种极化方式的静态RCS数据分别如图4、图5所示,其中,图4为目标是空客A320型飞机的RCS结果,图5为F-15C型战斗机的RCS结果。
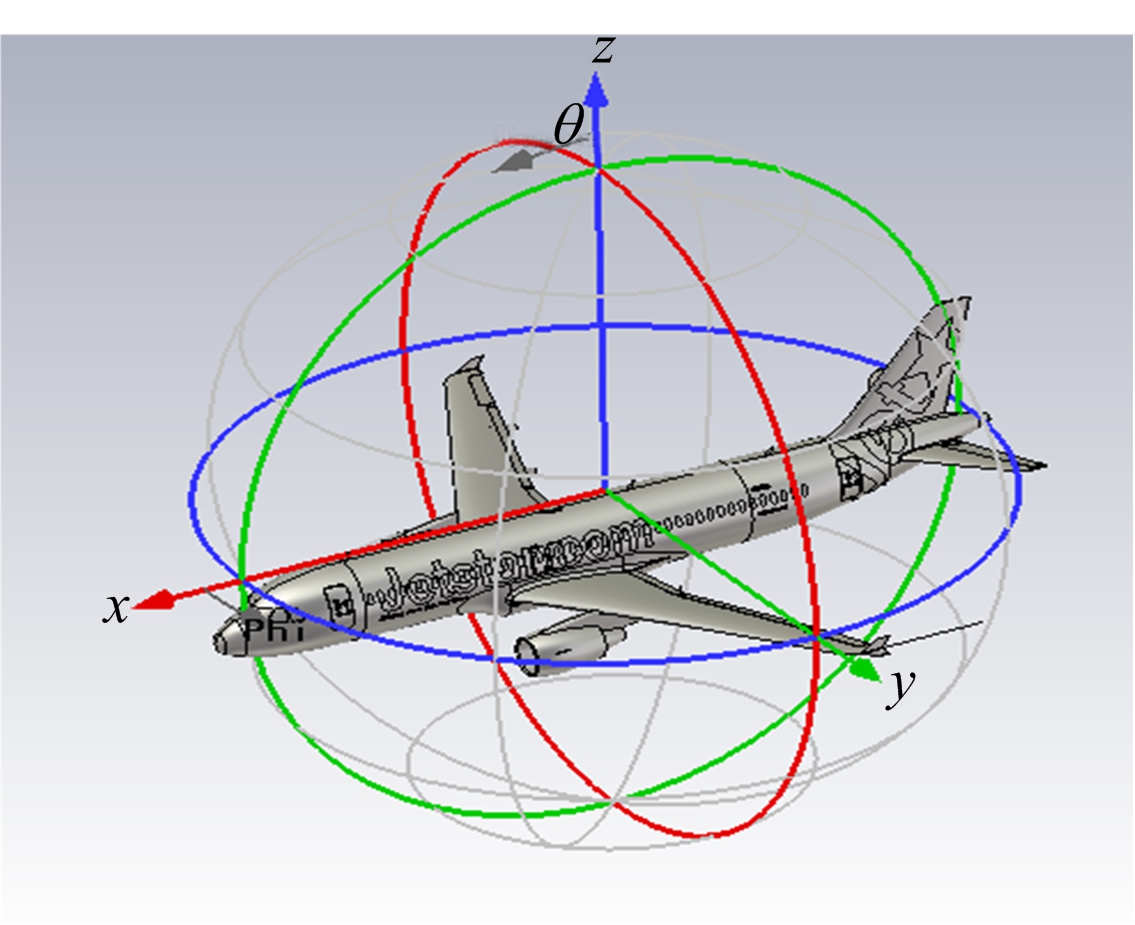
(a) 空客A320
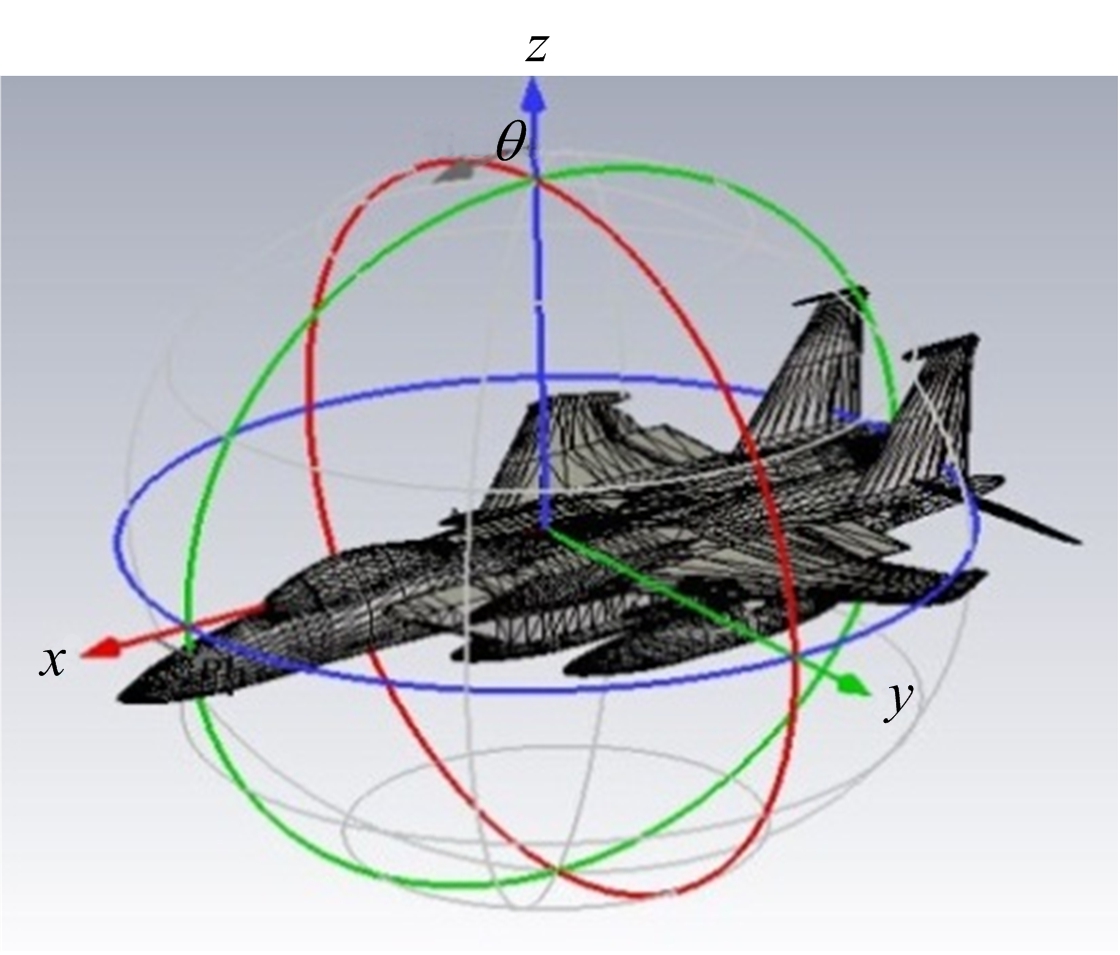
(b) F-15C
图3 飞行目标RCS仿真模型
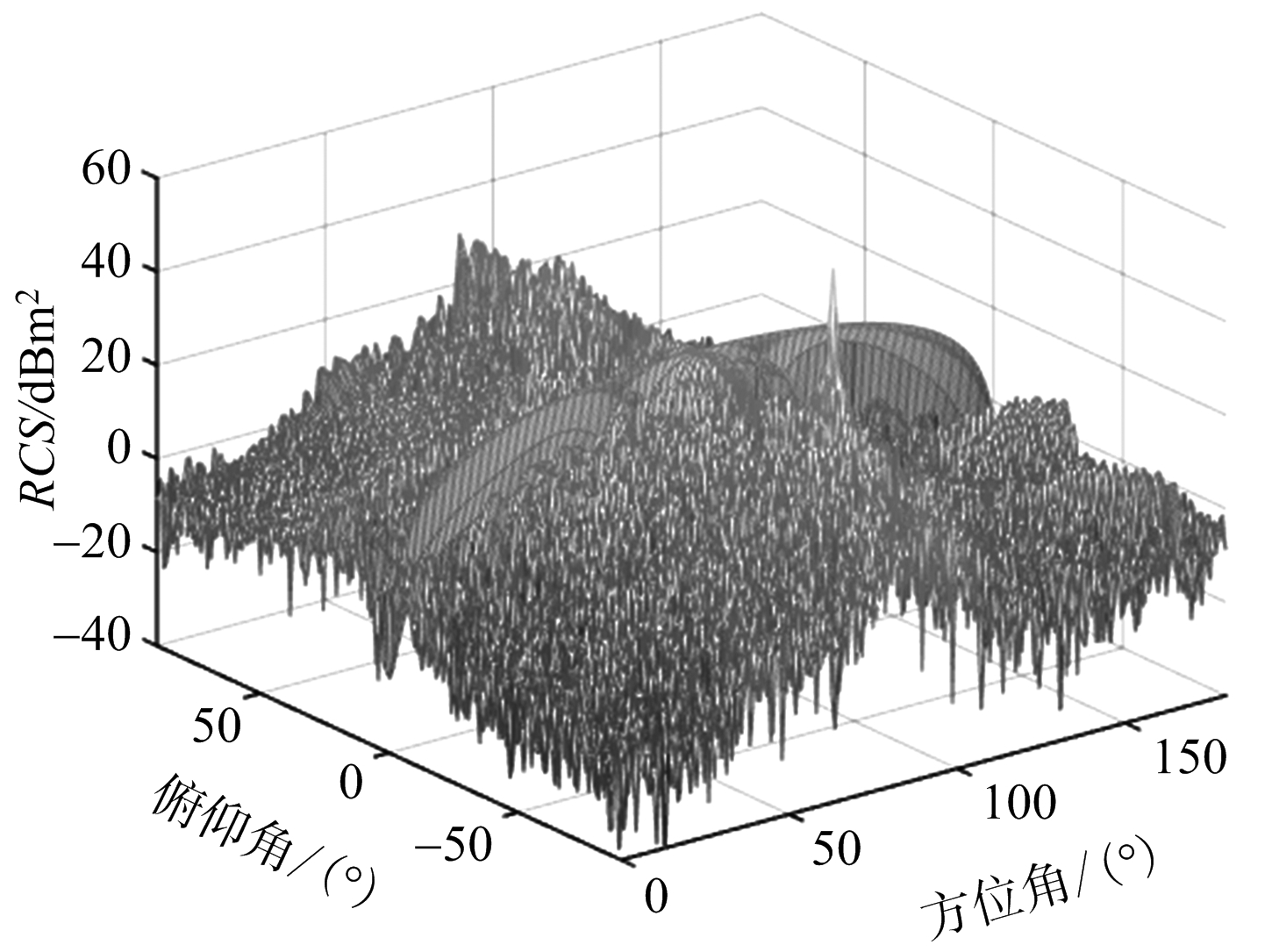
(a) A320 HH极化
(b) A320 HV极化
(c) A320 VH极化
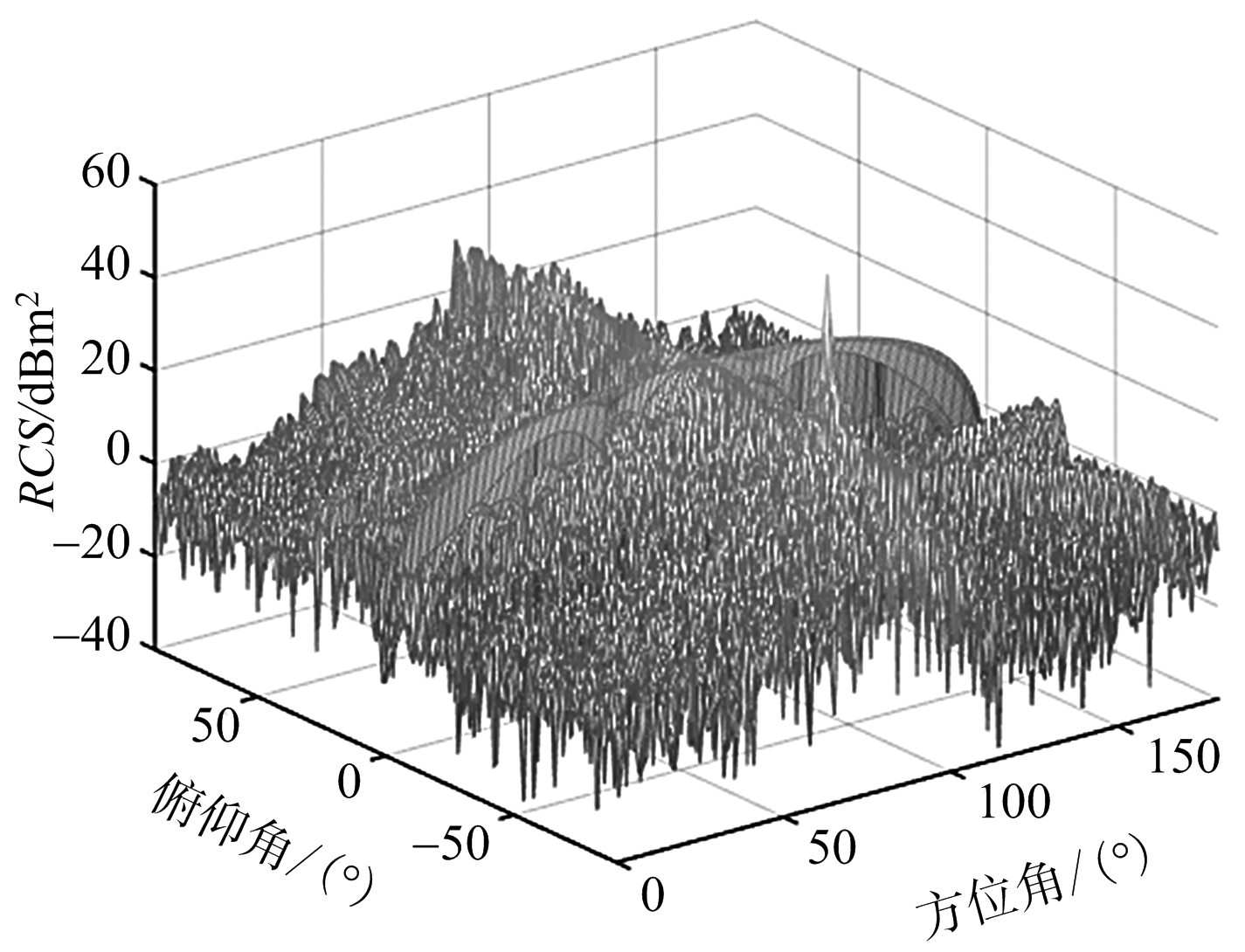
(d) A320 VV极化
图4 空客A320目标RCS电磁仿真计算结果
对比A320机型的4种极化方式的RCS数据可以发现,交叉极化的RCS起伏特性基本相同,共极化的RCS起伏特性也基本相同,与文献[5]中的结论一致。对比A320和F-15C的相同极化方式的RCS数据,虽然两种机型的外观相差较大,但出现高RCS的区域基本一致。由于F-15C比A320外观更复杂,表现在RCS特性上就是F-15C的高RCS区域没有A320的集中,以上特性在目标到接收机雷达视线角发生变化时也同样存在。
另外,从图中可以明显看出,A320前向散射RCS在发射和接收极化方式相同时更为明显,最高可以达到60 dB左右,但散射范围较小,40 dB以上区域在5°×5°左右;相比而言,F-15C前向散射RCS并不突出。
(a) F-15C HH极化
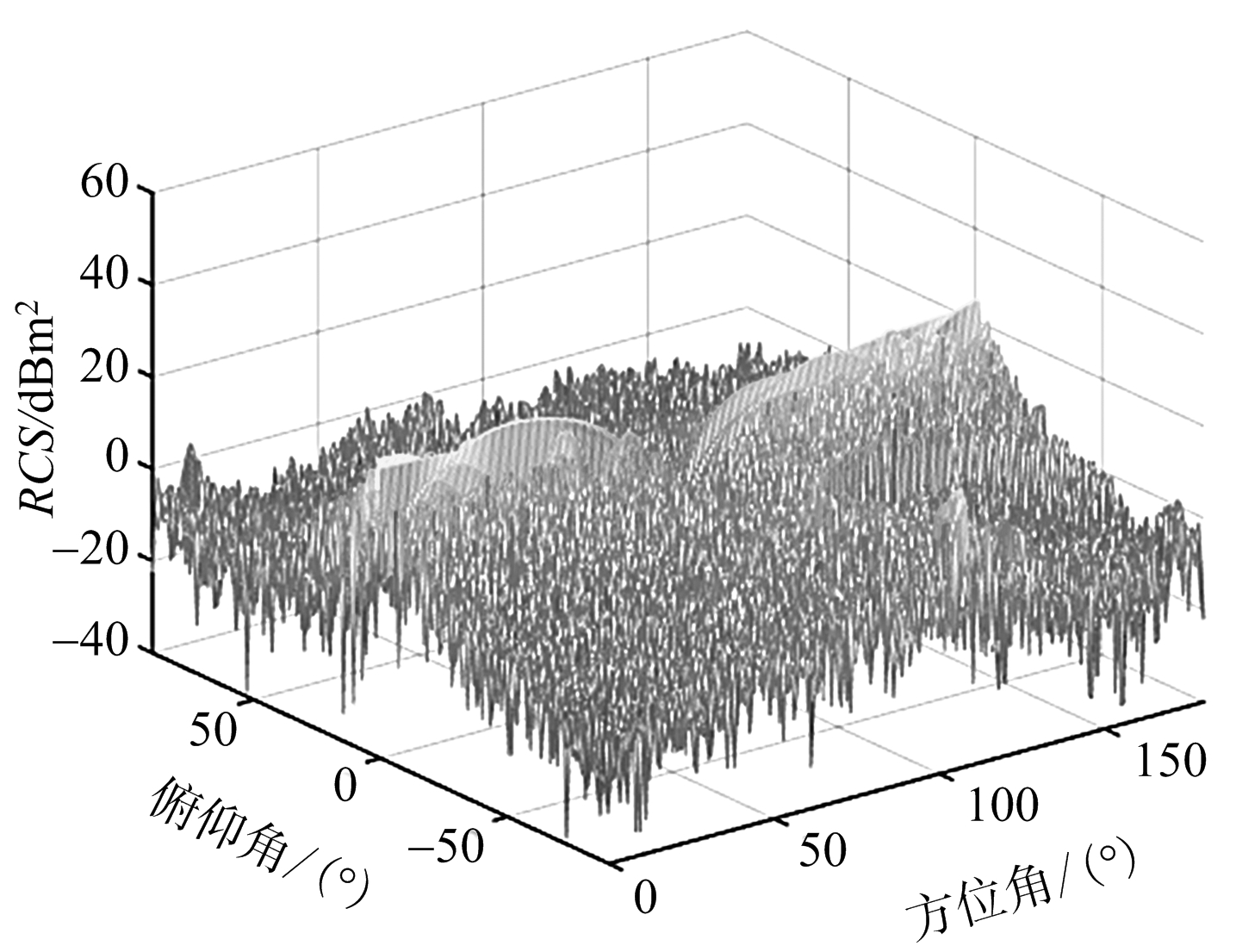
(b) F-15C HV极化
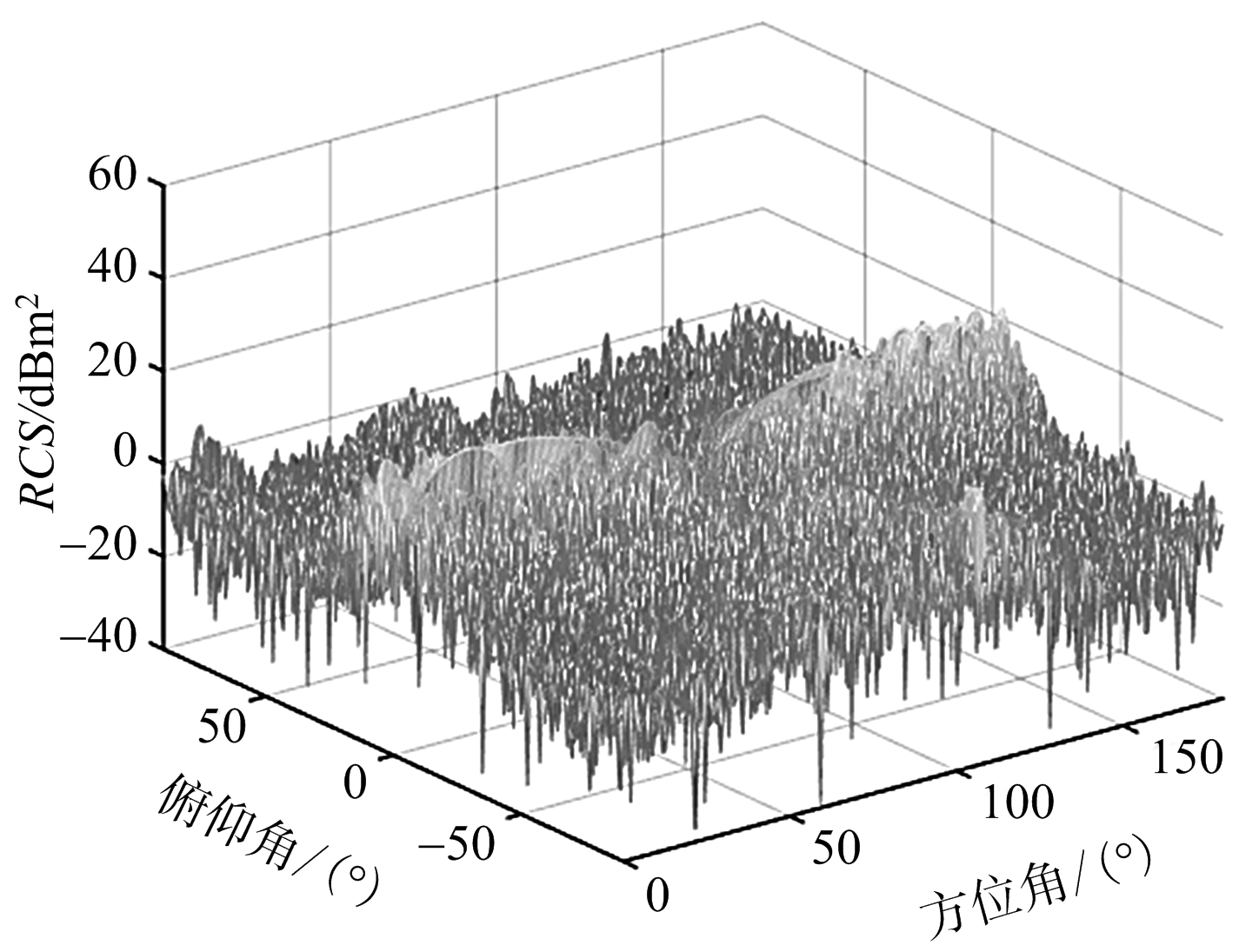
(c) F-15C VH极化

(d) F-15C VV极化
图5 F-15C目标RCS电磁仿真计算结果
通过观察两种机型的RCS特点,可以发现高RCS区域对应的散射角存在一个共性,即镜像散射特性:目标以x轴正方向平飞,设从目标到接收机的雷达视线的反向延长线通过一个以x轴为圆心,平行于zoy平面的单位圆,则位于单位圆上任意一点的辐射源对应的目标RCS均较高。如图6所示,将该单位圆上部分角度连线,与目标高RCS区域完全吻合。根据该特性,在已知从目标到接收机方位角、俯仰角时,可以简单计算出何种角度的辐射源所提供的信号更可能被接收机检测。在图7通过仿真验证了该镜像散射特性,镜像散射角的连线与高RCS区域完全吻合。
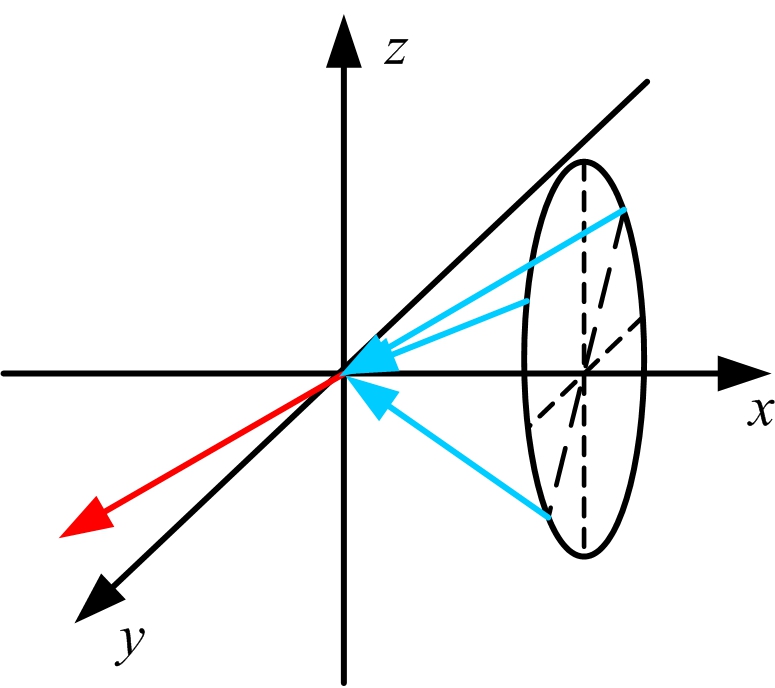
图6 高RCS区域雷达视线角示意图
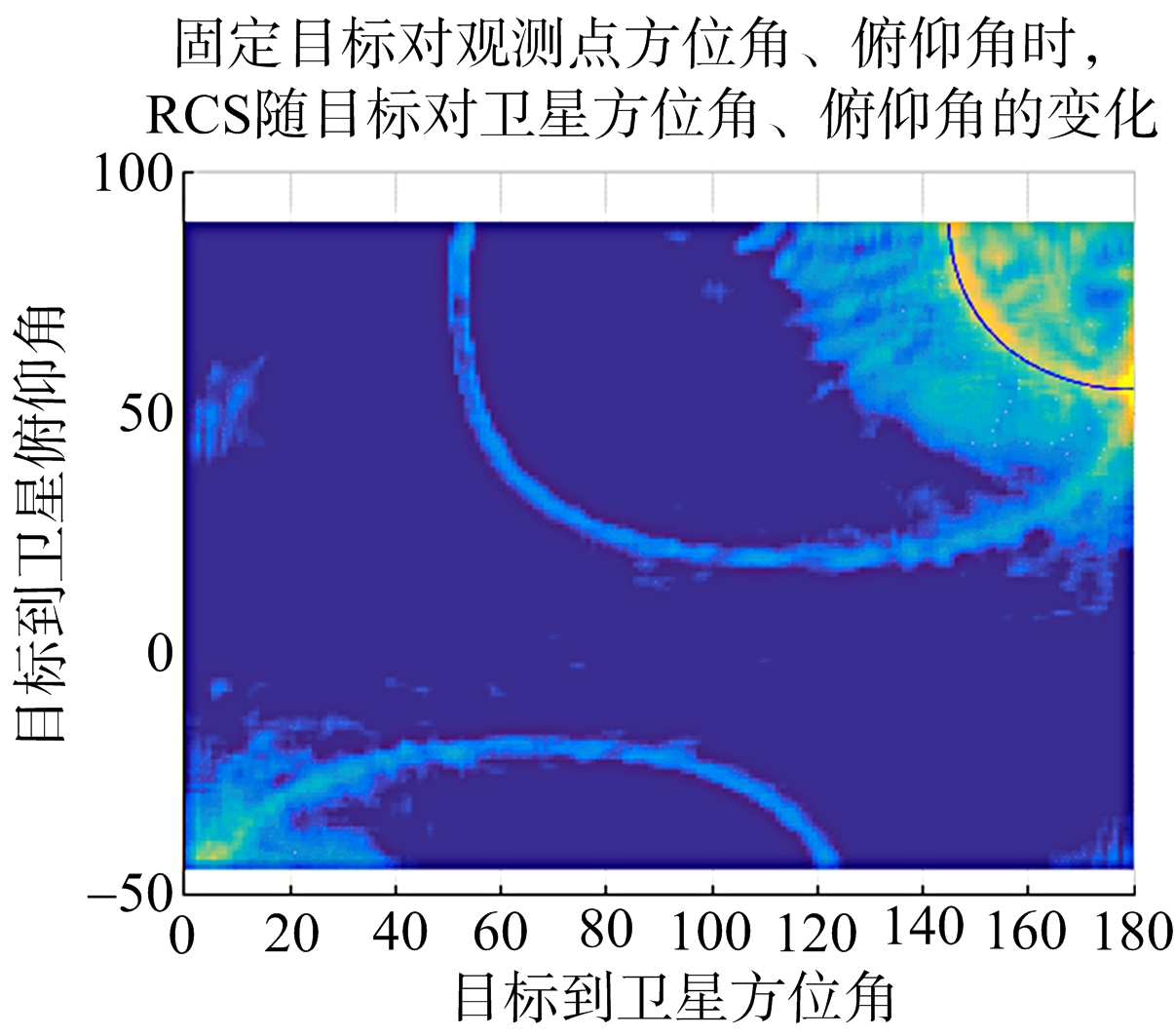
图7 镜像散射特性验证结果
按照1.2.1节中设定的航路,结合通过飞机姿态计算所获得的雷达视线角,对静态RCS数据进行插值计算,可知目标在设定航路上飞行时各辐射源对应的RCS情况。仿真中飞机以(200,0,0) m/s的速度从(-1 800,4 000,3 000)m位置开始运动,接收机始终对准目标,以图8中的4颗导航卫星为例,两种机型在40 s内的目标RCS时间序列如图9所示。可以发现,C6,C8对应的目标RCS值要远高于另外两颗卫星,差距可以达到 30~40 dB。该结论说明了在本系统中对辐射源选择的必要性。同时在飞机水平飞行的情况下,在航路(自西向东)正侧方的卫星对应的目标RCS往往较高。该结论可用于指导双基地雷达布站、辐射源筛选以及飞机突防等。
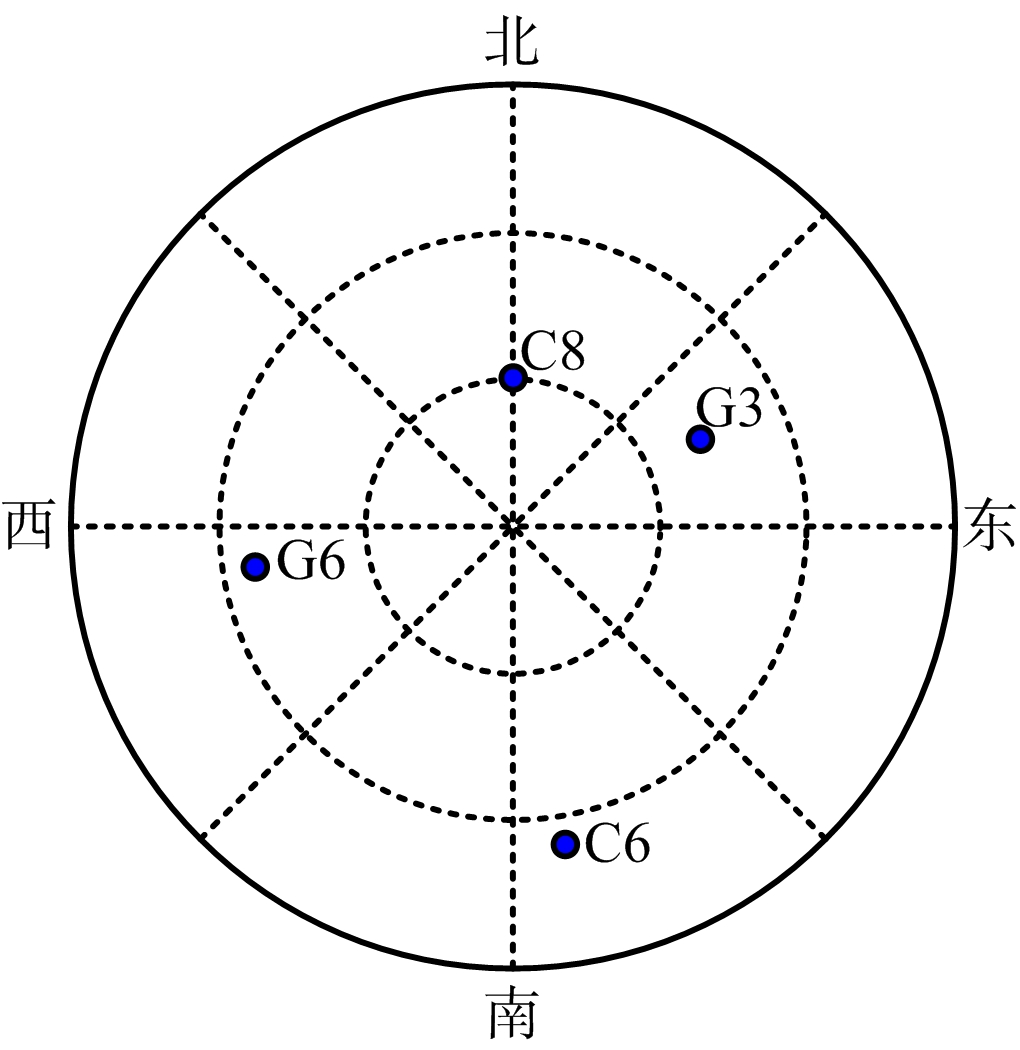
图8 时间序列计算中作为辐射源的卫星
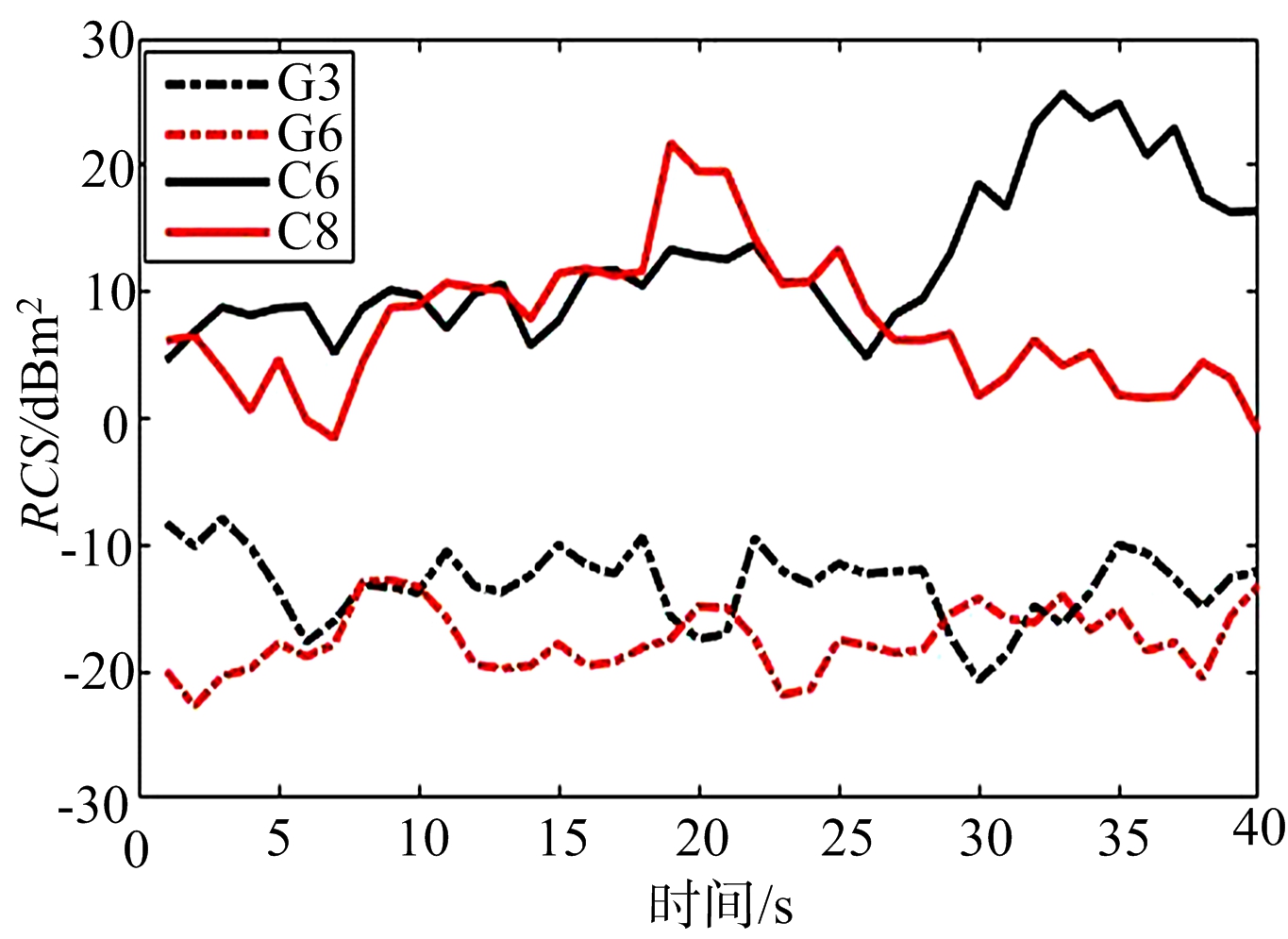
(a) 空客A320
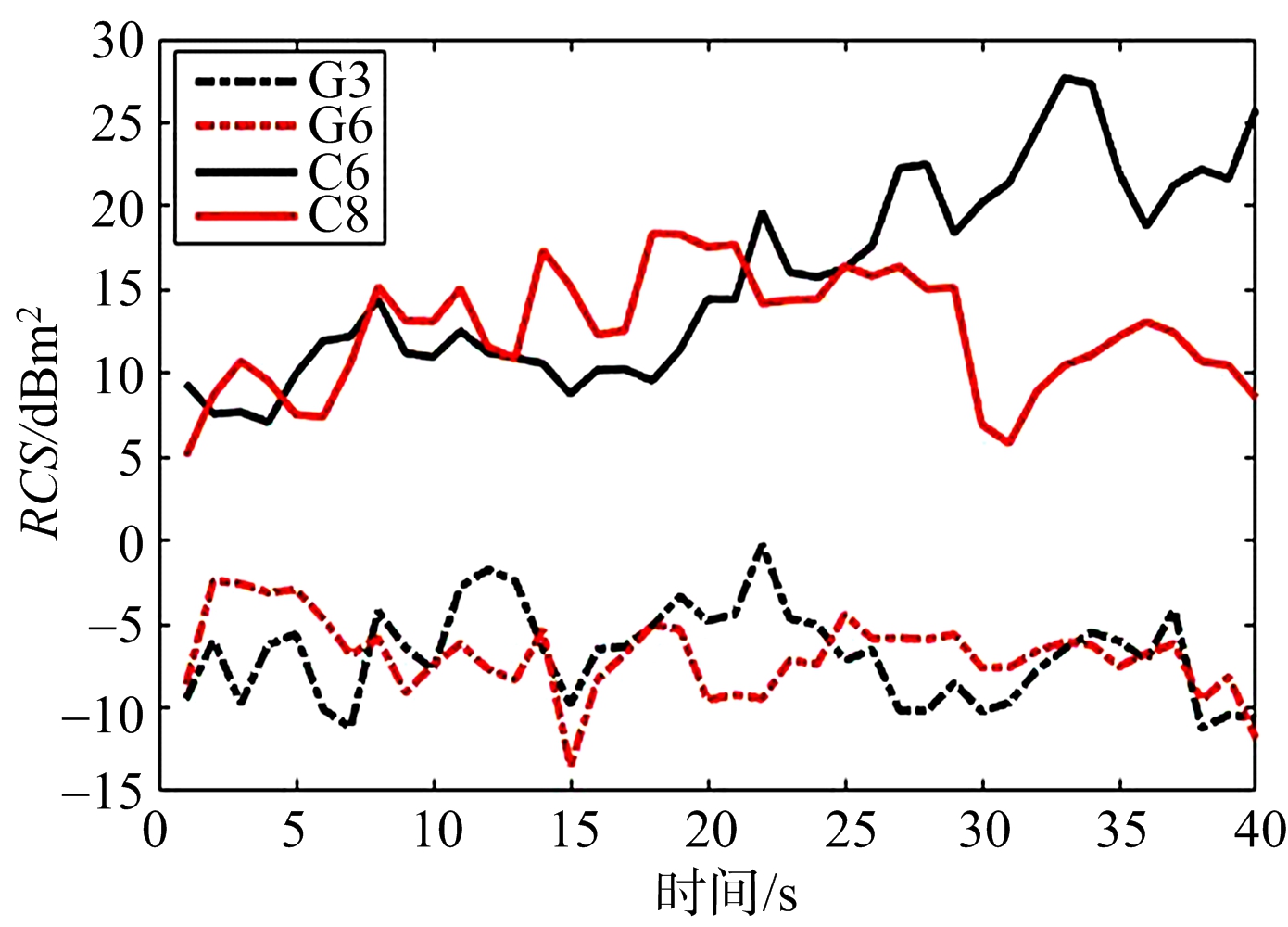
(b) F-15C
图9 多辐射源对应的目标RCS时间序列
被动雷达系统中目标散射截面主要与卫星-目标-接收机的空间几何关系、飞行姿态的扰动以及目标自身的材料与形状有关,在不考虑材料的前提下,通过对比A320和F-15C两款飞机的RCS主要特性,发现虽然飞机外形相差较大,但双基地的特性基本类似,说明卫星-目标-接收机几何关系在双基地雷达RCS特性中占据较重要的地位。考虑到双基地雷达RCS数据量要比单基地雷达大很多,仿真耗时更长,因此对于只要把握双基地RCS基本特性的情况,可以参考文中的仿真结果。
本文通过计算以导航卫星为外辐射源的被动雷达系统的雷达视线角,结合双基地飞行目标RCS静态结果,可以得出各卫星对应航线上目标的RCS时间序列,对选择合适辐射源以提高系统的检测性能有很高的参考价值。
[1] 戴崇,徐振海,肖顺平. 非合作目标动态RCS仿真方法[J]. 航空学报, 2014, 35(5):1374-1384.
[2] 刘佳,方宁,谢拥军,等. 姿态扰动情况下的目标动态RCS分布特性[J]. 系统工程与电子技术, 2015, 37(4):775-781.
[3] 刘万萌,童创明,王童,等. 飞机运动特征对动态RCS序列的影响分析[J]. 火力与指挥控制, 2017, 42(7):33-38.
[4] 张小宽,刘尚钞,张晨新,等. 隐身目标的双基地雷达探测技术[J]. 系统工程与电子技术, 2008, 30(3):444-446.
[5] 艾小锋,曾勇虎,高磊,等. 飞机目标全极化双基地散射特性研究[J]. 雷达学报, 2016, 5(6):639-646.
[6] 周超,张小宽,张敬伟,等. 典型隐身飞机动态RCS时间序列研究[J]. 空军工程大学学报(自然科学版), 2013, 14(3):15-18.
[7] 周超,张小宽,吴国成. 基于坐标转换目标动态RCS时间序列研究[J]. 火力与指挥控制, 2014, 39(3):56-59.
[8] 包中华,卢建斌,席泽敏. GNSS无源MIMO雷达系统及其探测性能分析[J]. 航天电子对抗, 2016, 32(4):47-51.
