图1 系统组成框图
导弹脱靶量是指导弹与目标之间的最小距离,代表偏离目标的大小[1]。脱靶量测量包括标量脱靶量测量和矢量脱靶量测量。标量脱靶量是指遭遇过程中弹与靶的最小相对距离,表示弹命中目标的误差大小,或称作命中精度,它是衡量武器毁伤效能的重要指标[2-3]。由于标量脱靶量测量系统相对便宜,能够对很多弹射类武器(如子弹、炮弹和导弹等)进行测量,并且它们几乎可以安装在任何尺寸的靶标上,因此目前标量脱靶量测量系统仍然在广泛使用。
根据雷达体制的不同,目前主要有3种标量脱靶量测量方法:基于多普勒效应、基于冲击脉冲体制以及基于线性调频连续波(LFMCW)体制的脱靶量测量方法。文献[4]采用的基于多普勒效应脱靶量测量方法的优点是电路简单,但是该方式只能用于点目标测量,在近距离对体目标进行测量时,有多普勒谱扩展效应,造成多普勒频率测量误差。文献[5]所采用的基于冲击脉冲体制的脱靶量测量方法,虽然从理论上解决了体目标脱靶量测量问题,但是对信号处理采样率和数据传输率提出了很高的要求,系统实现难度较大。
文中设计的标量脱靶量测量系统采用基于LFMCW雷达测距原理的脱靶量测量方法,系统带宽大、距离测量精度高。但是接收机中频带宽小,信号采样率和数据传输速率低,信号处理计算量小,电路简单。该系统具有电路简单、成本低、体积小、重量轻、峰值功率低、测量精度高等特点。而且采用一体化、模块化设计,根据不同任务可装载于不同的靶标平台。该系统已形成系列化产品,成功应用于靶弹、靶船和无人机等多个靶标平台。系统脱靶量测量精度≤1 m,测量范围为0~60 m,达到国内先进水平,为部队打靶训练和科研靶试提供精确的脱靶量信息,具有良好的应用前景。
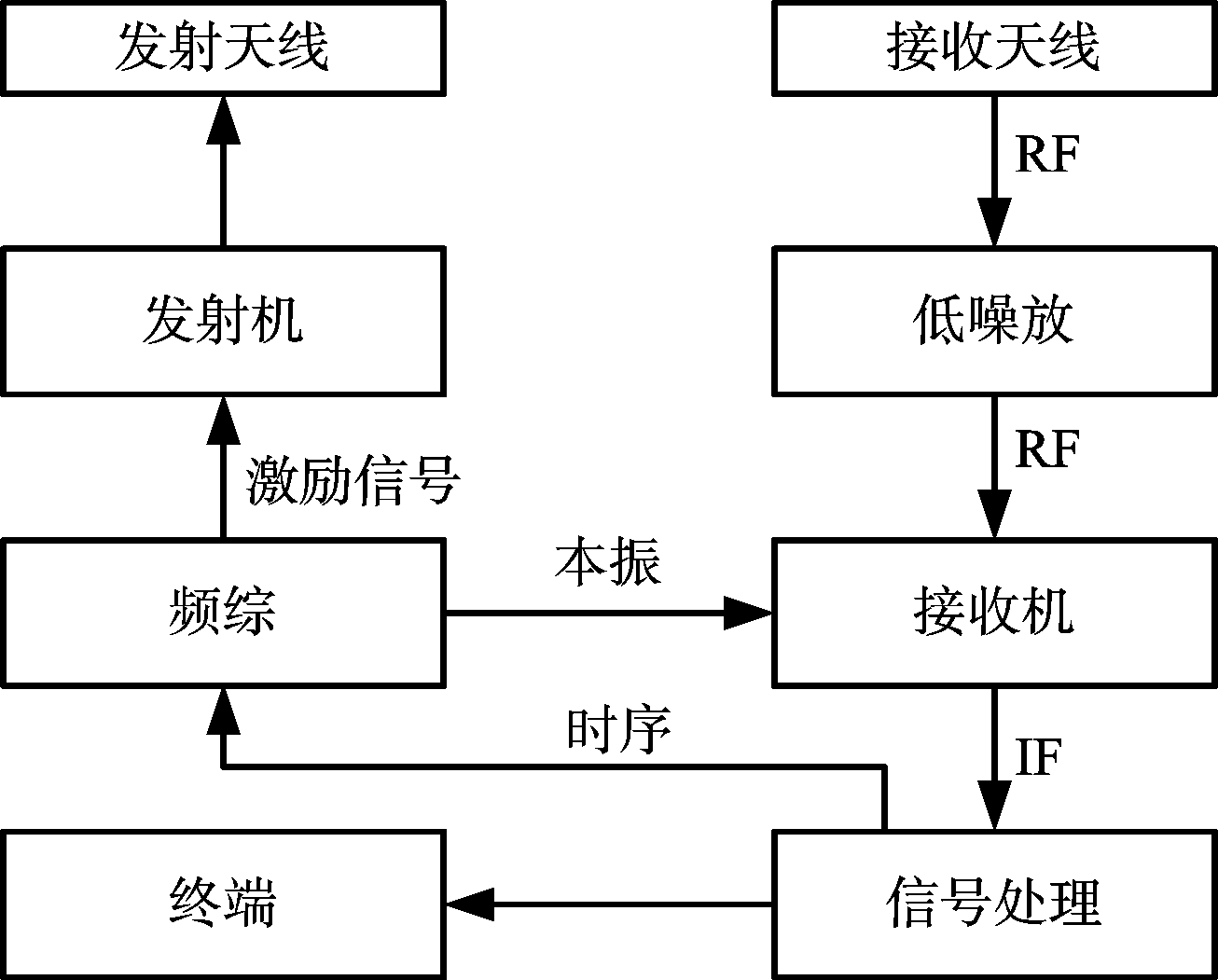
系统主要由频综、发射机、收/发天线、低噪放、接收机、信号处理和数据处理显控终端等几部分组成。组成框图如图1所示。
图1 系统组成框图
频综产生射频激励信号,其频率在时间上按三角波规律变化。激励信号经发射机放大后,通过发射天线转换成电磁波信号向外发射。电磁波信号遇到目标后,一部分能量被反射回接收天线,接收天线将回波信号转换为射频信号(RF),经低噪放放大后送入接收机。由于回波信号具有一定时间延迟,回波信号延迟后与本振信号就存在一定的频差,频差关系如图2所示[6]。

图2 LFMCW频差关系
由图2可知,正斜率调制时回波信号与本振信号的差频fi+与目标距离R以及多普勒频率fd的关系可表示为

(1)
式中,Tm为调制周期,ΔFm为调制频偏。负斜率调制时回波信号与本振信号的差频fi-与目标距离R以及多普勒频率fd的关系可表示为

(2)
将式(1)和式(2)相加,去掉多普勒fd的影响。可将距离R表示为
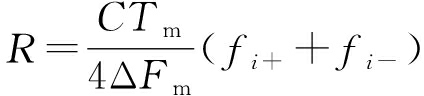
(3)
接收机对回波信号和本振信号进行混频、滤波、放大即可得到差频fi+和fi-,然后根据式(3)即可得到目标距离R。
信号处理流程如图3所示。由上节分析可知,得到差频信号的频率即可求出被测目标与雷达的相对距离R。本系统的本振是由激励信号功分出来的,因此回波信号与本振混频后得到的差频信号为零中频信号。根据系统所选参数以及距离检测范围,接收机输出的零中频信号频率范围为0~2 MHz,信号处理先将中频信号进行40 MHz AD采样,将模拟信号转化为数字信号,并对信号进行数字低通滤波(LPF),滤波器的频率响应特性如图4所示,其主要作用是滤除带外杂波以及抽取抗混叠。然后对数据进行8倍抽取,将采样率降为5 MHz。在满足Nyquist抽样定律的情况下尽量减小信号处理的计算量。抽样后选取数据中间信号质量较好的256点进行快速傅里叶变换(FFT)处理,最后进行频域恒虚警检测(CFAR),检测目标并根据式(3)求出目标与雷达的相对距离R。
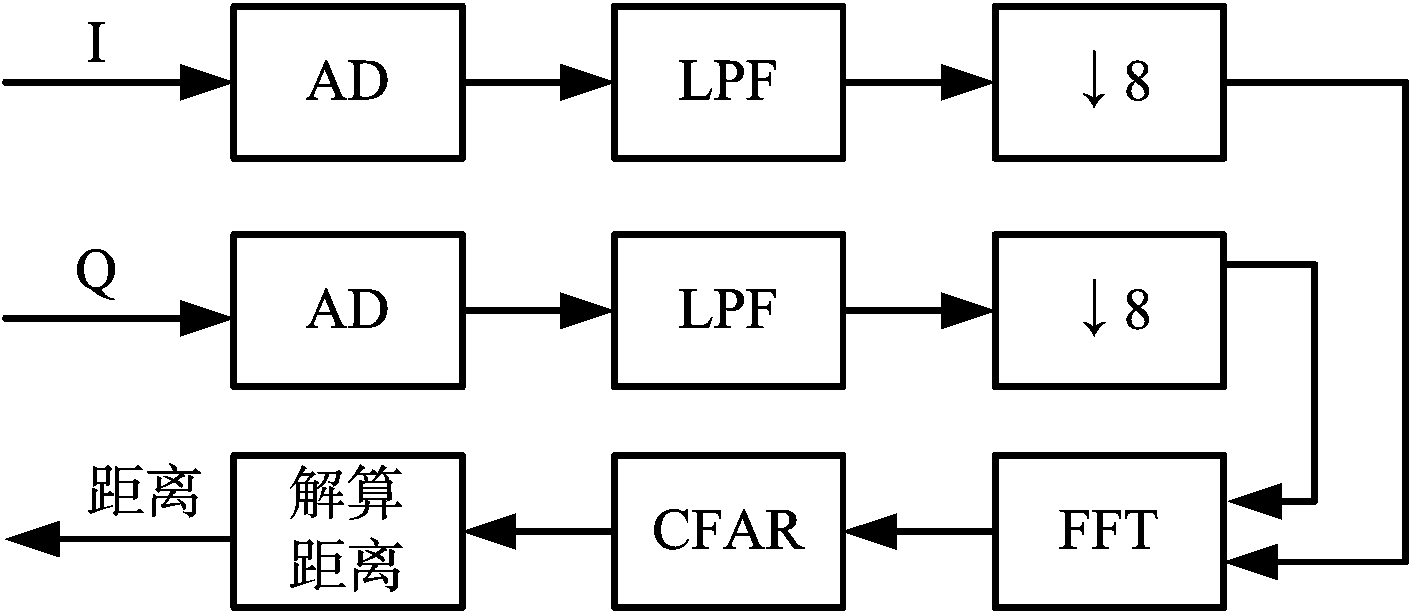
图3 信号处理流程
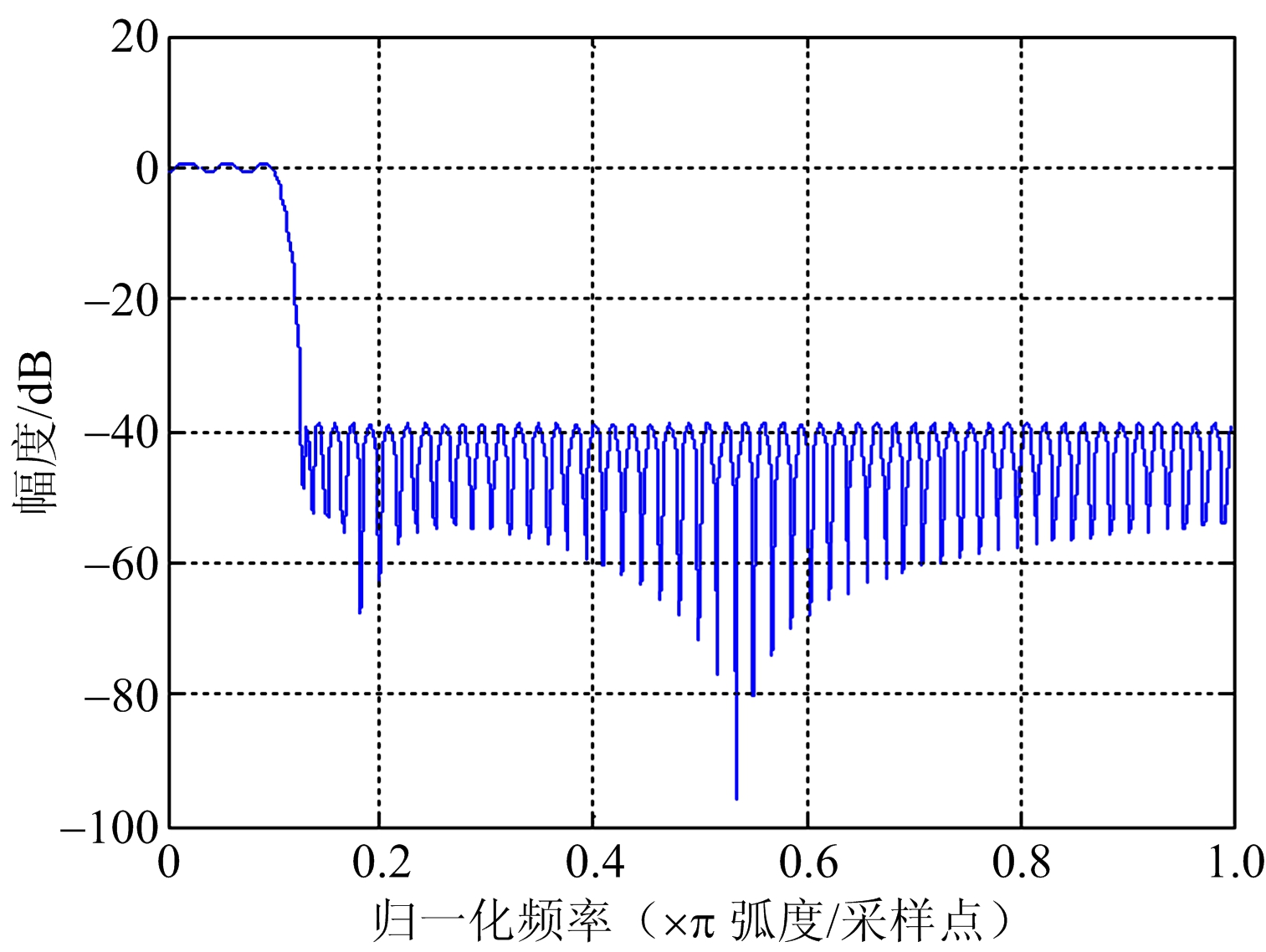
图4 低通滤波器频率响应特性
图5为标量脱靶量测量的参考坐标系,即脱靶量测量示意图。测量系统位于坐标系原点,导弹以一定偏角和倾角与装有脱靶量测量系统的靶标进行交汇。设交汇时间内,导弹相对于靶标作匀速直线运动,速度为v0,其运动轨迹与测量系统的最短距离,即脱靶量为ρ。记参考时间t =0时刻导弹与脱靶点的距离为D0,再记任意时刻导弹与测量系统的距离为R(t)。
图5 脱靶量测量示意图
根据图5所示的几何关系,导弹与测量系统的实时距离可表示为
R2(t)=(D0-v0t)2+ρ2
(4)
进一步整理可得

(5)
令导弹第一次被测量到的时刻为参考时间t=0,其余各测量时刻为ti,对应的实时距离为Ri,那么式(5)可表示为

(6)
设

(7)

(8)
(9)
则测量矩阵可表示为
r=A×b
(10)
由上式可求得测量矩阵的最小二乘解为

(11)
由于估计出![]() 即可得到标量脱靶量ρ和速度v0[5]。因此,通过对交汇过程中导弹与靶标相对距离的连续测量,根据式(11)可解算出导弹标量脱靶量的最小二乘解。
即可得到标量脱靶量ρ和速度v0[5]。因此,通过对交汇过程中导弹与靶标相对距离的连续测量,根据式(11)可解算出导弹标量脱靶量的最小二乘解。
系统结构主要由电子设备机箱、天线以及相关结构件三个主要部分组成。其中电子设备机箱包括频综、接收机、发射机、电源、信号处理等几部分,是整个脱靶量测量系统的核心部分。
电子设备机箱内的各部分均采用模块化设计,在调试完成后集中布置在机箱内,在布置过程中尽可能使各部分安排紧凑、合理,在满足系统使用性能前提下,使电子设计机箱内的空间可以得到充分利用,减轻系统重量缩小空间尺寸,将电子机箱重量控制在2 kg以内;同时,机箱在结构设计过程中还应充分考虑系统电磁屏蔽要求和强度要求。电子机箱结构方案如图6所示。

图6 电子设备机箱结构设计
天线组合由接收天线、发射天线、低噪放、电缆等几部分组成。为了贯彻模块化、通用化要求,设计了一块结构安装板,将各部分集成为一个天线组合,形成通用天线模块,可以根据不同的任务需求采用不同的安装方式,以减少安装调试过程中的工作量。天线组合结构方案如图7所示。

图7 天线组合结构设计
单面天线被设计为90°的波束宽度,根据导弹不同的攻击方式,可以用4面天线组合通过电子开关进行高速切换,保证对弹目交汇区域的全向覆盖。由于每面天线的波束指向不同的方向,因此该脱靶量测量系统不但能测量标量脱靶量,还能测大致的脱靶方向。
2015年,该系统在东海某海域进行实弹检靶试验。此次试验装载于靶船上,用于测量某型反舰导弹的标量脱靶量。为了适应海上使用环境,在脱靶量测量系统下面增加了伺服稳定平台,以保证雷达波束始终照射海平面。同时将测量系统与稳定平台密封在天线罩内,防止海上盐雾的侵蚀。然后用支架装于靶船甲板上,安装图如图8所示。

图8 脱靶量测量系统安装图
脱靶量测量系统装于船尾,4面天线的波束覆盖示意图如图9所示。天线1监视靶船左舷方向,天线2监视靶船船头方向,天线3监视靶船右弦方向,天线4监视船尾以外方向。
图9 4面天线波束覆盖示意图
脱靶量测量系统测到导弹的原始点迹和通过最小二乘法拟合后的导弹脱靶量如图10所示,图中虚线内原始点迹为导弹击中靶船后爆炸产生的碎片。剔除碎片后,标量脱靶量最小二乘解为 19.6 m,速度最小二乘解为1 136 m/s。
图10 原始检测点迹及拟合曲线
图11 脱靶量测量系统与导弹命中位置
脱靶量位于天线2监视的区域,表示偏靶方向为船首方向。而靶船长度约为50 m,根据测量的脱靶量(相对于脱靶量测量系统)和偏靶方向,导弹应击中靶船中部位置。靶船回岸以后,对靶船进行检靶,脱靶量测量系统与导弹命中位置如图11所示。导弹击中靶船中部位置,而且用皮尺测量脱靶量测量系统与命中位置的实际距离为20 m,测量值与真实值相符,且测量误差≤1 m。实际偏靶方向(相对于脱靶量测量系统)与系统检测偏靶方向相同。坐标转换后可直接转换为导弹相对于靶船中心的脱靶量。试验结果表明,该系统切实可行,可用于导弹脱靶量测量。
本文设计了一种基于LFMCW雷达体制的标量脱靶量测量系统,利用回波信号与本振信号之间的差频对目标进行测距,再通过最小二乘算法求解目标与雷达之间的最小距离,即脱靶量。系统具有成本低、体积小、重量轻、峰值功率低和测量精度高等特点,另外采用一体化、模块化设计,根据不同任务,可安装于靶弹、无人机和靶船等多种靶标平台。该系统装载于靶船上对某型反舰导弹的脱靶量进行了实弹检验,检验结果表明,系统方案切实可行,脱靶量测量精度≤1 m,可用于导弹标量脱靶量测量。
[1] 郑首铎,方良. 一种估算导弹脱靶量的方法[J]. 制导与引信, 2015,36(2):14-17.
[2] 王胜国,吴霞飞,宋颖祥,等. 海基平台的导弹落点脱靶量测量技术研究[J]. 电光系统, 2015(3):7-10.
[3] 潘昶. 脱靶量的计算方法研究及应用[J]. 计算机与数字工程, 2017, 45(7):1278-1281.
[4] 郭宁. 基于引信多普勒频率信号的脱靶量估算方法[J]. 现代防御技术, 2007,35(2):31-33.
[5] 周翔宇,魏国华,吴嗣亮. 基于窄脉冲的标量脱靶量测量算法[J]. 系统工程与电子技术, 2007,29(2):194-195.
[6] 丁鹭飞,耿富录. 雷达原理[M]. 3版. 西安: 西安电子科技大学出版社, 2002:142-143.

邓桂福 男,1983年生,四川遂宁人,电子科技大学硕士,主要研究方向为雷达系统、雷达信号处理。
E-mail:dgf090406@qq.com