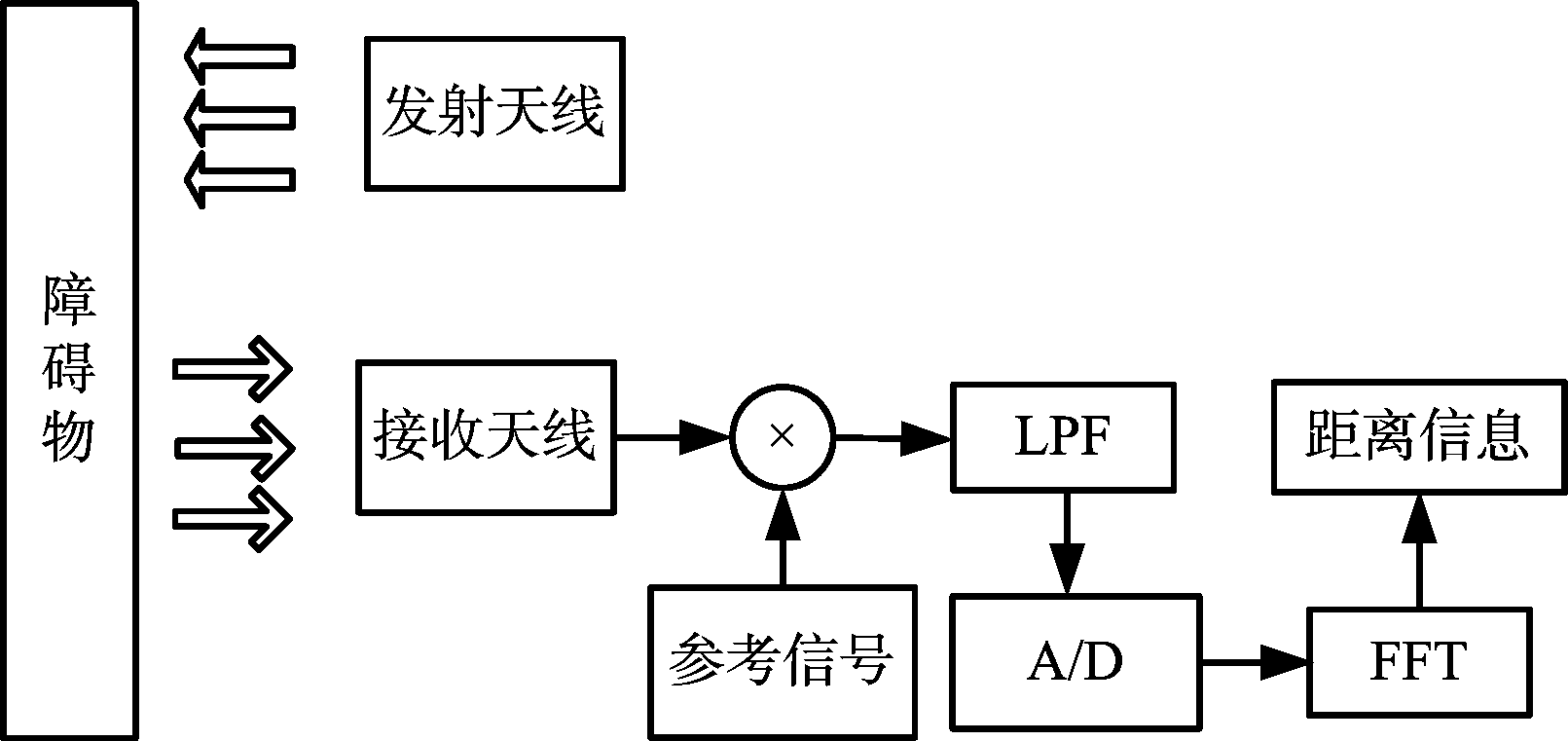
图1 雷达工作流程示意图
我国国土辽阔,人口数量居世界首位,为了保障人民群众的安全用电,电力设施建设发展迅速。根据统计资料,2012年底,全国35 kV及以上输电线路回路长度达到102.1×104 km,居世界第一;2016年底,我国35 kV及以上输电线路总里程达到175.6×104 km,增幅达到72%。当前,我国已经成为世界电网发展的绝对引领者。电网规模增长与运检人员配置的矛盾日益突出,如赣西供电公司输电班组人均运维线路长度42.5 km,严格按照输电线路状态巡视周期要求,要完成巡视任务,每个班组每个月平均耗时需28个工作日,状态巡视难以按周期完成[1]。
目前,国网公司正逐步采用无人机技术来提高架空输电线路的运行效率和质量,无人机已成为电网巡检的重要技术手段。无人机作业的优点是在无需拉闸断电的情况下,即可对输电线路进行近距离检测。与传统人工巡线方式相比,该技术不仅能大幅度提高工作效率,有效保障巡线作业人员的人身安全,降低巡线成本,而且还能大大缩短系统反应时间[2]。据美国相关机构统计,每10 000 h飞行任务中,经常低空作业的直升机平均会发生10次事故,而高空飞行的固定翼飞机仅为大约0.3。飞控手在地面对无人机进行遥控操作,仅仅通过飞控手肉眼观察,很难从根本上解决无人机撞机电力线等障碍物。为了提高无人机的防撞性能,需要增强无人机感知障碍物与及时避让障碍物的能力。
电力巡检无人机作业环境复杂,为避免无人机飞行中碰撞障碍物或线路,确保飞行安全,必须要考虑无人机自动检测障碍物并避让的技术[3]。目前,用于无人机避障的技术手段主要有光学探测器、红外探测器、激光雷达和毫米波雷达[4]。光学探测器基于视觉基础探测目标,天气因素对探测效果影响很大,环境光线过强会大大减弱光学传感器的探测距离,雾天、雾霾天气下由于空气中漂浮微小颗粒物,会阻碍光线传播,从而使光学传感器性能大幅度降低。红外探测器价格便宜,实现原理简单,但测量距离近,方向性较差,并且容易受到太阳光的干扰。激光雷达测量的准确性和测距的精度高,但雨雾天气对它的测距会有影响,在沙尘天气中无法使用。毫米波雷达成本低,测量距离比红外探测器大,毫米波波长大于光波,可以绕过空气中的雾粒,虽然精度略低于光学传感器,但能满足无人机的避障精度要求,是唯一一种可满足无人机全天候工作要求的避障传感器。
毫米波雷达测距可分为发射、接收、处理三部分。连续调频毫米波信号通过发射天线发出,电磁波遇到障碍物以后会反射回来,之后被雷达接收天线接收,雷达接收机把接收到的回波信号和参考信号混频,从而得到一个差频信号,把差频信号进行放大、滤波等处理后,通过采样变为数字基带信号,把数字信号进行FFT频谱分析后,就可以提取出目标的距离信息,如图1所示。
图1 雷达工作流程示意图
去斜率处理方法的原理如图2所示,其基本原理是采用与发射信号相同的线性调频信号作为本振信号,与目标回波信号进行差拍处理。毫米波在n个发射周期的发射信号复数形式可以表示为
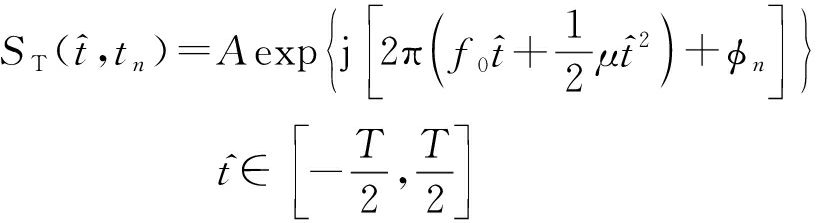
(1)
式中,![]() 为快时间域,tn=nT为慢时间域,μ为调频斜率,φn为随机相位。
为快时间域,tn=nT为慢时间域,μ为调频斜率,φn为随机相位。
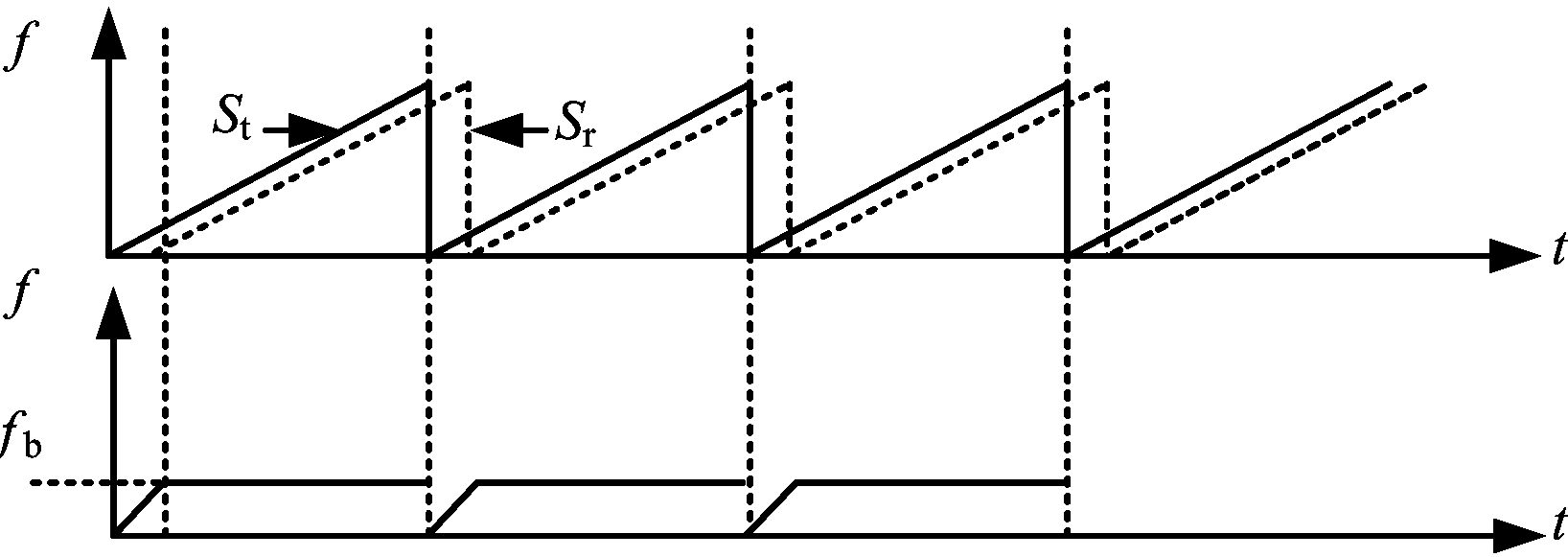
图2 去斜率原理图
t=0时,假设有一个距离为R的点目标径向速度为v,第n个调制周期的接收信号可以表示为
![]()
![]()
![]()
(2)
式中,Kr为回波衰减系数,φn为目标反射的随机相位,![]() 为点目标回波瞬时延时时间,
为点目标回波瞬时延时时间,![]() 发射信号和接收信号进行混频后得
发射信号和接收信号进行混频后得
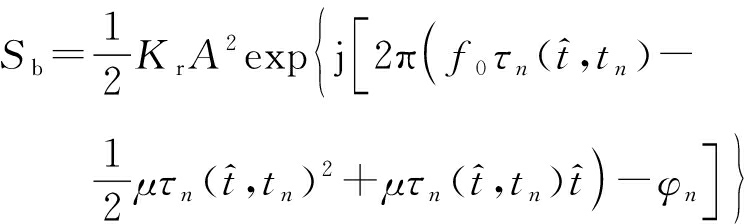
(3)
将![]() 代入式(3)可得
代入式(3)可得
![]()
![]()
![]()
(4)
对差拍信号进行傅里叶变换,得到其频谱:
Sb(f)=![]()
![]()
(5)
化简后计算出正单边谱:
Sb(f)+=![]()

(6)
由式(6)可得其中心频率为![]() 在fb0处取得峰值,可得
在fb0处取得峰值,可得
(7)
假设点目标在静止状态时的差频信号表示为
Sb=![]() KrA2·
KrA2·

(8)
式中,τ0=2R/c。差频频率为
(9)
由式(9)可得差频频率fb和距离R成正比关系[5],所以傅里叶变换后频率为f1的谱线对应的目标距离为
R1=f1cτ/2B
(10)
主处理器选择TI公司设计的TMS320F28335,这是业界首款浮点数字信号控制器,具有150 MHz的高速处理能力,具备32 bit浮点处理器,6个DMA通道支持ADC,McBSP和EMIF,有多达18路的PWM输出,其中6路为TI特有的更高精度的PWM输出(HRPWM)。系统采用主从设计,DSP28335与STM32F103通过双口RAM实现数据共享,STM32F103在系统功能上负责控制毫米波雷达的发射、外接LCD显示屏的显示,以及对外通信接口的控制,可以通过通信指令对雷达进行参数设置,外接显示屏用于实时显示与当前参数查询。DSP28335则充分节省资源,用于进行回波信号的处理计算,最终获得距离信息,之后将距离信息存储于双口RAM中,STM32F103通过双口RAM获得距离信息并用于LCD屏幕显示与串口距离信息的发送。
如图3所示,在功能划分上,DSP28335仅用于回波信号经功率放大、滤波、A/D转换后的数据处理,由于运算量较大,尽可能地节约DSP28335的片内资源,障碍物的距离信息最终在DSP28335中运算获得,之后通过操作地址总线与数据总线存储于双口RAM中。STM32F103相对于DSP28335运算能力较差,因此在该系统中分配为LCD显示、串口通信、参数储存、信号发射等对运算速度要求相对较低的功能。目标的距离信息在DSP28335存储到双口RAM后,STM32F103可以实时获取该输入值,双口RAM可供DSP28335与STM32F103同时读写,方便快捷。
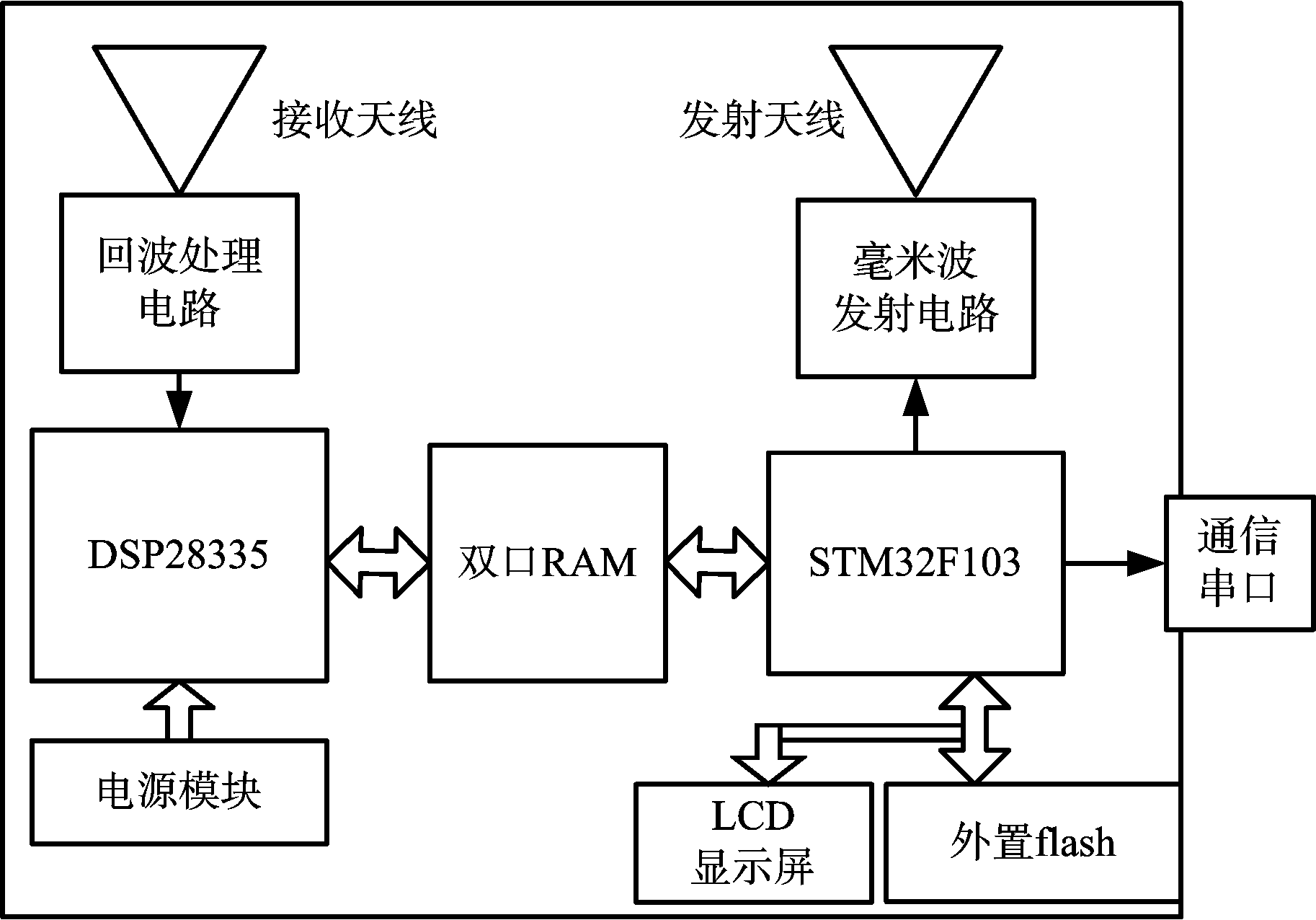
图3 毫米波雷达系统组成
如图4所示,STM32F103控制压控振荡器产生本振信号,之后经过功分器、倍频器产生两路相同的发射波,其中一路作为本振信号用于接收电路比较,另一路则经过功率放大通过发射天线发射。其中VCO选型芯片为TGV2240,经测试该芯片在18.640~19.040 GHz之间线性度最高。倍频器芯片选型为HMC579,该芯片是ADI公司研制的一款宽带有源倍频器,采用GaAs PHEMT技术。由3 dBm信号驱动时,该倍频器提供13 dBm的典型输出功率,在32~46 GHz的频率下工作。功率放大器选择TriQuint公司的TGA4522芯片,这是一款性能优良的商用MMIC放大芯片,采用0.15 μm pHEMT技术工艺,能在33~47 GHz频率范围内实现15 dB以上的增益。
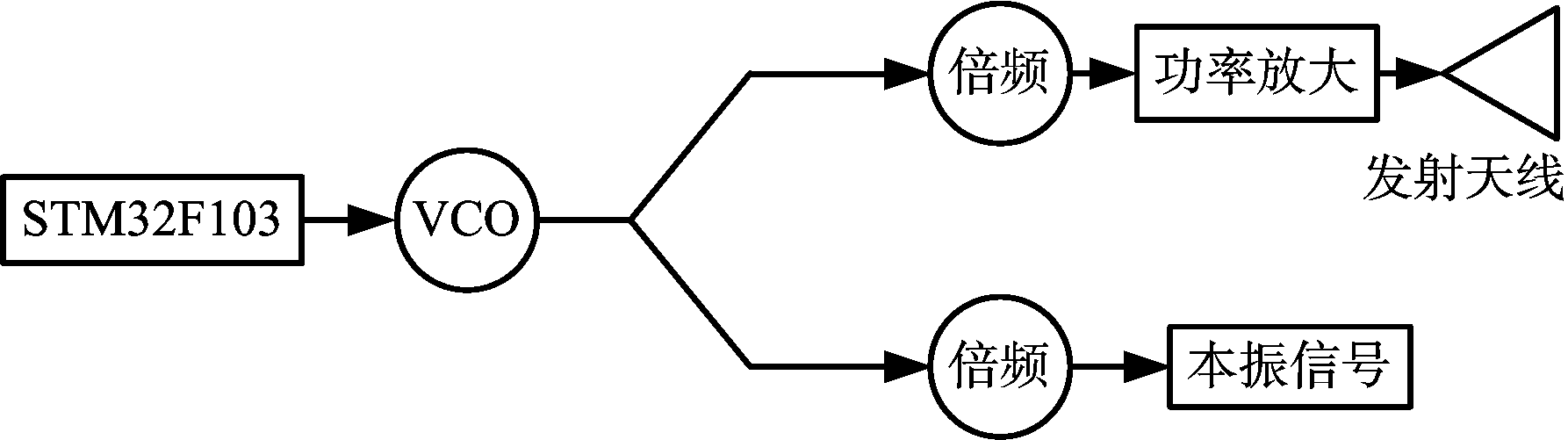
图4 毫米波发射模块
图5为毫米波雷达接收模块的组成,其中低噪放大器管芯采用XL1000芯片,该芯片具有噪声低、增益高的特点;混频器选用Hittite公司的HMC329管芯,尺寸仅为0.85 mm×0.55 mm,是一款高性能宽带双平衡混频管芯。
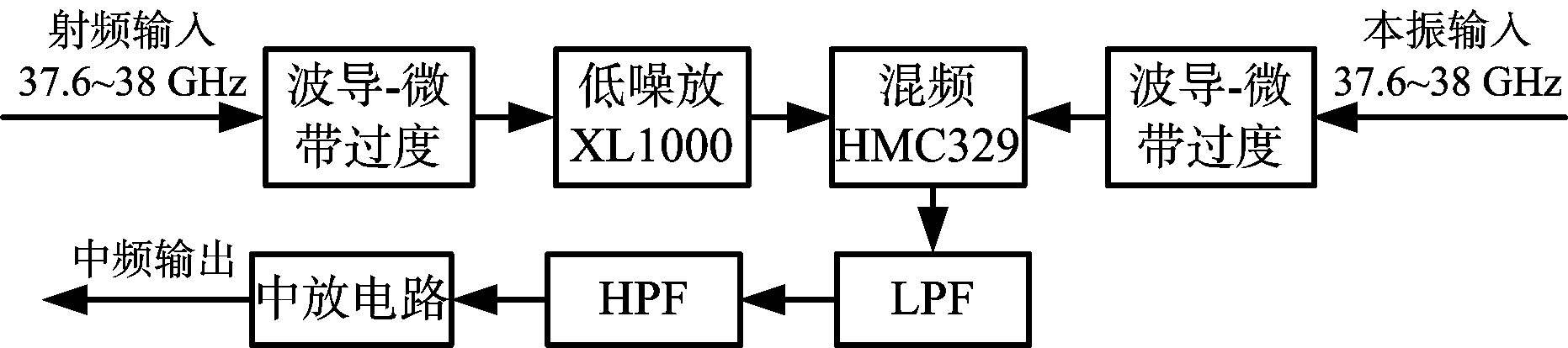
图5 接收模块组成
该系统为双CPU处理系统,DSP28335与STM32F103均需一套程序独立运行,二者的合理配合是整体系统性能优秀的保障。程序处理流程如图6所示。
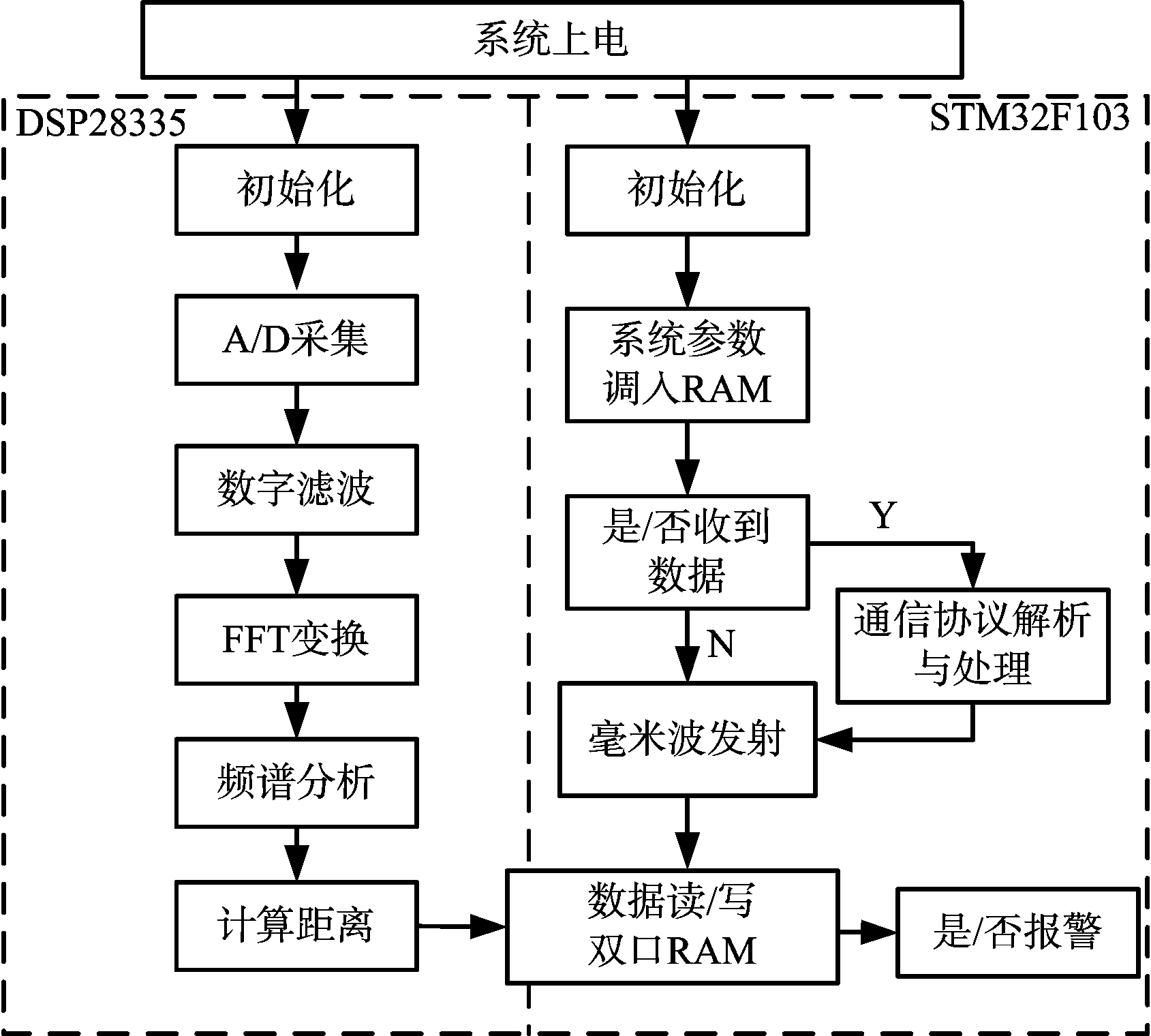
图6 DSP/STM32双CPU程序运行流程
系统程序运行方式如图6所示,系统上电以后,两个CPU系统进行初始化,STM32系统进行系统参数的调取,并进行相应配置,随时监控是否有外部数据请求,并负责发射毫米波信号。同时,以DSP28335为主的单片机系统进行毫米波信号的接收处理,最终计算出距离信息存储于双口RAM中,供STM32进行调取。
由电力线所引起的无人直升机事故频频发生, 因而确保无人机飞行安全一个很重要的方面就是对电力线的检测[6],无人机避障技术的应用是无人机安全巡检输电线路的保证。毫米波雷达系统能满足无人机避障全天候的工作要求,在成本和通用性上优于其他避障技术。本文的创新点在于将调频连续波应用于无人机避障雷达,并通过双CPU主从搭配架构设计,主CPU最大程度保证回波信号的运算处理,从CPU负责人机交互与上位机通信,并可通过从机设置报警上限及其他系统参数,主从CPU通过双口RAM进行数据共享,最大程度保证数据利用效率。
[1] 何惠清,朱昱,袁炜. 小型多旋翼无人机在架空输电线路巡检应用探索[J]. 江西电力, 2017(8):33-35.
[2] 何思远,刘刚,王玲,等. 基于无人机的输电线路设备识别方法研究[J]. 红外与激光工程, 2013, 42(7):1940-1944.
[3] 孙阳,李鲁,王蔚,等. 特高压输电线路巡检无人机安全技术探讨[J]. 山东电力技术, 2017, 44(2):15-19.
[4] 王家秀. 直升机载毫米波防撞系统技术研究[D]. 南京:南京理工大学, 2011:1-15.
[5] 段玮倩,胡岸勇,苗俊刚. 射频与微波技术在安防领域的应用[J]. 电子技术应用, 2017, 43(7):4-7.
[6] 郑天茹,王滨海,刘俍,等. 电力巡线无人直升机障碍规避系统[J]. 山东电力技术, 2012(1):14-17.

